一.硬件要求:
①ubuntu20.04(ubuntu18.04的话,需要把下面出现的noetic改为melodic;ubuntu16.04的话,需要把下面出现的noetic改为kinetic;)
②ROS版本:noetic
③任意USB摄像头(我这里用的是乐视三合一体感摄像头)
二.安装使用
2.1 ubuntu20.04 ros为noetic版本
①下载usb_cam软件包
sudo apt install ros-noetic-usb-cam
//(ubuntu18.04的话,需要把下面出现的noetic改为melodic;ubuntu16.04的话,需要把下面出现的noetic改为kinetic;)
②启动usb相机节点
A.查找摄像头接口
ls /dev/video*
这里可以先在插入usb摄像头的时候检查一下接口,然后拔出usb摄像头的时候再检查一下接口(看看少了哪些,少了的就是usb摄像头的)

很明显, /dev/video2 或者 /dev/video3 是我的摄像头usb接口号(好像ubuntu下摄像头是有两个号的,用任意一个就可以了);
B.在该路径下修改launch文件,换成你自己的摄像头接口
到达该路径:
cd /opt/ros/noetic/share/usb_cam/launch/
编辑该文件
sudo gedit usb_cam-test.launch

原本这里是 /dev/video0,将其改为/dev/video2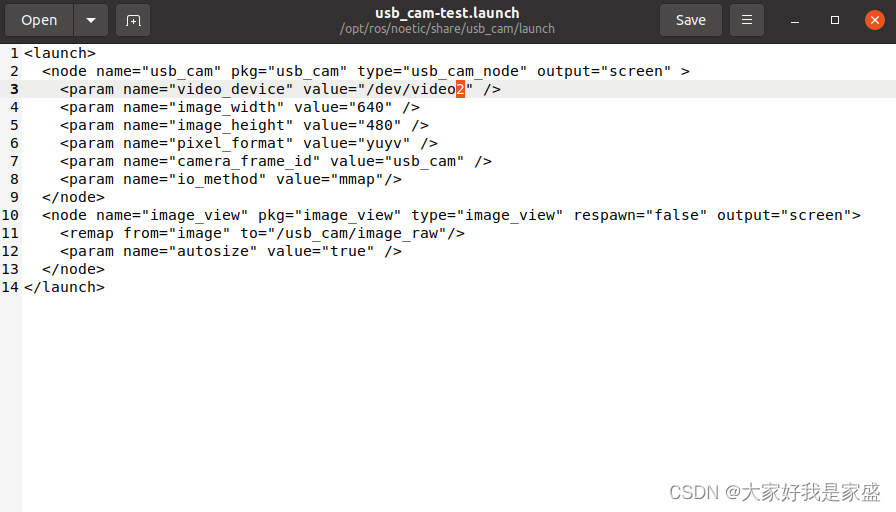
保存后退出,然后运行:
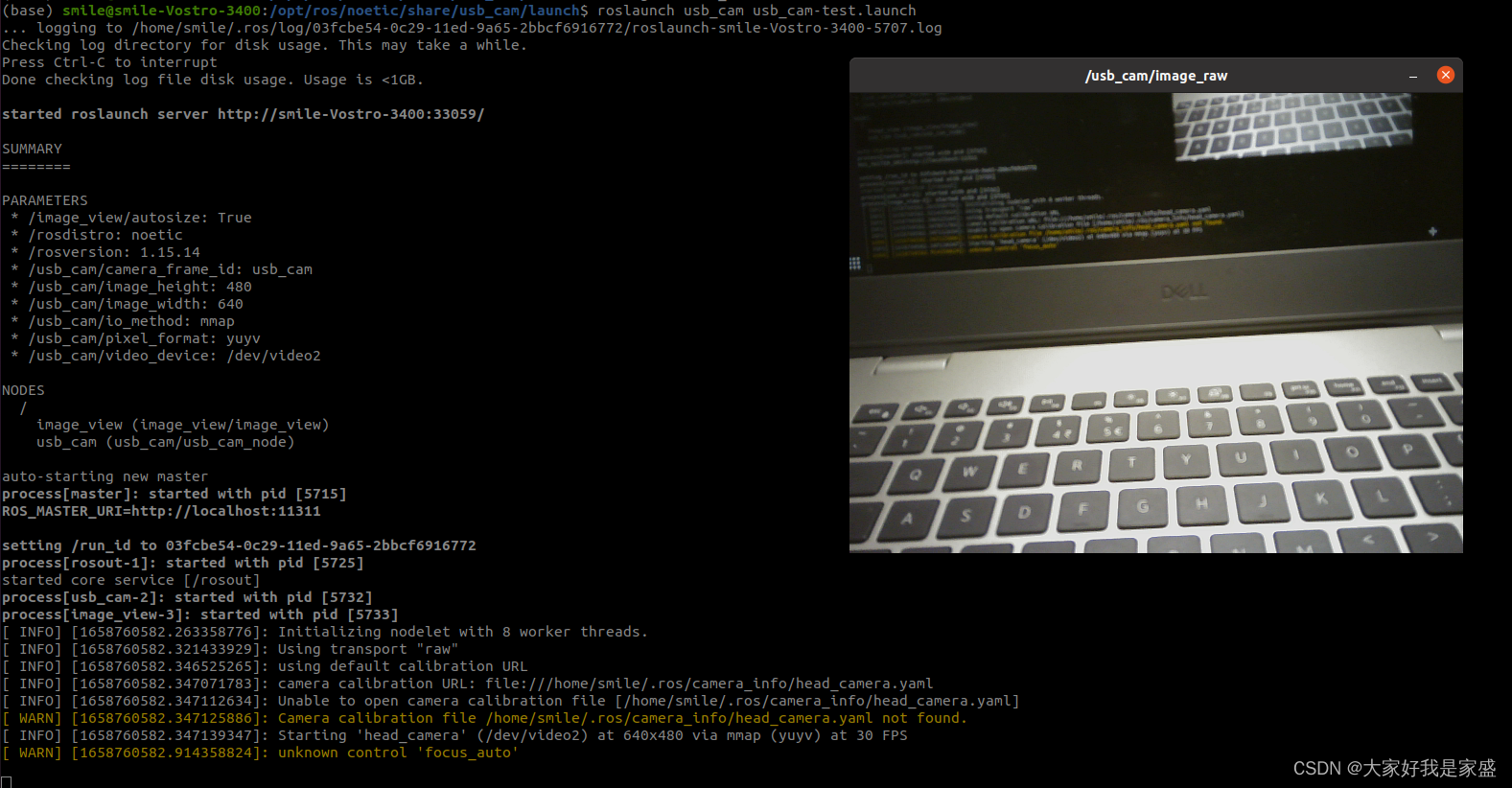
roslaunch usb_cam usb_cam-test.launch
然后就可以运行摄像头了:
2.2 ubuntu18.04 ros为melodic版本
2.2.1 直接通过命令行安装usb-cam包(推荐,适合网络状态好的时候)
sudo apt install ros-melodic-usb-cam
如果网络不好,就无法安装,会报错让你sudo apt-get upgrade --fix-missing之类的,如果网络行,那么sudo apt install ros-melodic-usb-cam安装命令就会一次成功,如果不行,那就都没用…如果你是无法命令行安装,可以看我下面的教程,用源码安装;
命令行安装过程:
smile@smile-X3-S:~/app_install$ sudo apt install ros-melodic-usb-cam
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following packages were automatically installed and are no longer required:
linux-hwe-5.4-headers-5.4.0-107 linux-hwe-5.4-headers-5.4.0-113
linux-hwe-5.4-headers-5.4.0-121 linux-hwe-5.4-headers-5.4.0-122
linux-hwe-5.4-headers-5.4.0-124 linux-hwe-5.4-headers-5.4.0-84
python-rosdistro
Use 'sudo apt autoremove' to remove them.
The following additional packages will be installed:
libv4l2rds0 ros-melodic-camera-calibration-parsers
ros-melodic-camera-info-manager v4l-utils
The following NEW packages will be installed:
libv4l2rds0 ros-melodic-camera-calibration-parsers
ros-melodic-camera-info-manager ros-melodic-usb-cam v4l-utils
0 upgraded, 5 newly installed, 0 to remove and 0 not upgraded.
Need to get 422 kB/583 kB of archives.
After this operation, 2,182 kB of additional disk space will be used.
Do you want to continue? [Y/n] y
Get:1 https:
Get:2 https:
Fetched 422 kB in 3s (129 kB/s)
Selecting previously unselected package libv4l2rds0:amd64.
(Reading database ... 369439 files and directories currently installed.)
Preparing to unpack .../libv4l2rds0_1.14.2-1_amd64.deb ...
Unpacking libv4l2rds0:amd64 (1.14.2-1) ...
Selecting previously unselected package v4l-utils.
Preparing to unpack .../v4l-utils_1.14.2-1_amd64.deb ...
Unpacking v4l-utils (1.14.2-1) ...
Selecting previously unselected package ros-melodic-camera-calibration-parsers.
Preparing to unpack .../ros-melodic-camera-calibration-parsers_1.11.13-0bionic.20220127.151909_amd64.deb ...
Unpacking ros-melodic-camera-calibration-parsers (1.11.13-0bionic.20220127.151909) ...
Selecting previously unselected package ros-melodic-camera-info-manager.
Preparing to unpack .../ros-melodic-camera-info-manager_1.11.13-0bionic.20220127.153034_amd64.deb ...
Unpacking ros-melodic-camera-info-manager (1.11.13-0bionic.20220127.153034) ...
Selecting previously unselected package ros-melodic-usb-cam.
Preparing to unpack .../ros-melodic-usb-cam_0.3.6-0bionic.20220127.153459_amd64.deb ...
Unpacking ros-melodic-usb-cam (0.3.6-0bionic.20220127.153459) ...
Setting up libv4l2rds0:amd64 (1.14.2-1) ...
Setting up v4l-utils (1.14.2-1) ...
Setting up ros-melodic-camera-calibration-parsers (1.11.13-0bionic.20220127.151909) ...
Setting up ros-melodic-camera-info-manager (1.11.13-0bionic.20220127.153034) ...
Setting up ros-melodic-usb-cam (0.3.6-0bionic.20220127.153459) ...
Processing triggers for libc-bin (2.27-3ubuntu1.6) ...
Processing triggers for man-db (2.8.3-2ubuntu0.1) ...
2.2.1 通过源代码安装usb-cam包
创建一个文件夹(后面要在这个文件夹下编译源代码、安装程序包)
mkdir -p ~/app_install/catkin_ws/src
然后创建工作空间
cd ~/app_install/catkin_ws/
catkin_make
然后source一下(告诉计算机你在这个路径下准备要编译包了,这一步是将创建的工作空间加入到环境路径中。):
source devel/setup.bash
过程如下
smile@smile-X3-S:~$ mkdir -p ~/app_install/catkin_ws/src
smile@smile-X3-S:~$ cd ~/app_install/catkin_ws/
smile@smile-X3-S:~/app_install/catkin_ws$ catkin_make
Base path: /home/smile/app_install/catkin_ws
Source space: /home/smile/app_install/catkin_ws/src
Build space: /home/smile/app_install/catkin_ws/build
Devel space: /home/smile/app_install/catkin_ws/devel
Install space: /home/smile/app_install/catkin_ws/install
Creating symlink "/home/smile/app_install/catkin_ws/src/CMakeLists.txt" pointing to "/opt/ros/melodic/share/catkin/cmake/toplevel.cmake"
####
#### Running command: "cmake /home/smile/app_install/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/smile/app_install/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/smile/app_install/catkin_ws/install -G Unix Makefiles" in "/home/smile/app_install/catkin_ws/build"
####
-- The C compiler identification is GNU 7.5.0
-- The CXX compiler identification is GNU 7.5.0
-- Check for working C compiler: /usr/bin/cc
-- Check for working C compiler: /usr/bin/cc -- works
-- Detecting C compiler ABI info
-- Detecting C compiler ABI info - done
-- Detecting C compile features
-- Detecting C compile features - done
-- Check for working CXX compiler: /usr/bin/c++
-- Check for working CXX compiler: /usr/bin/c++ -- works
-- Detecting CXX compiler ABI info
-- Detecting CXX compiler ABI info - done
-- Detecting CXX compile features
-- Detecting CXX compile features - done
-- Using CATKIN_DEVEL_PREFIX: /home/smile/app_install/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/melodic
-- This workspace overlays: /opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/smile/app_install/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Looking for pthread.h
-- Looking for pthread.h - found
-- Looking for pthread_create
-- Looking for pthread_create - not found
-- Looking for pthread_create in pthreads
-- Looking for pthread_create in pthreads - not found
-- Looking for pthread_create in pthread
-- Looking for pthread_create in pthread - found
-- Found Threads: TRUE
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- Configuring done
-- Generating done
-- Build files have been written to: /home/smile/app_install/catkin_ws/build
####
#### Running command: "make -j16 -l16" in "/home/smile/app_install/catkin_ws/build"
####
smile@smile-X3-S:~/app_install/catkin_ws$ source devel/setup.bash
smile@smile-X3-S:~/app_install/catkin_ws$
在src目录下新建了一个程序包,$catkin_create_pkg usb_cam std_msgs rospy roscpp
cd src/
catkin_create_pkg usb_cam std_msgs rospy roscpp
然后需要编译一下,把它的工作空间加入到当前的工作空间下,source一下将工作空间加入到环境路径下。
cd ..
catkin_make
source devel/setup.bash
过程如下
smile@smile-X3-S:~/app_install/catkin_ws/src$ cd ..
smile@smile-X3-S:~/app_install/catkin_ws$ catkin_make
Base path: /home/smile/app_install/catkin_ws
Source space: /home/smile/app_install/catkin_ws/src
Build space: /home/smile/app_install/catkin_ws/build
Devel space: /home/smile/app_install/catkin_ws/devel
Install space: /home/smile/app_install/catkin_ws/install
####
#### Running command: "cmake /home/smile/app_install/catkin_ws/src -DCATKIN_DEVEL_PREFIX=/home/smile/app_install/catkin_ws/devel -DCMAKE_INSTALL_PREFIX=/home/smile/app_install/catkin_ws/install -G Unix Makefiles" in "/home/smile/app_install/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/smile/app_install/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/smile/app_install/catkin_ws/devel;/opt/ros/melodic
-- This workspace overlays: /home/smile/app_install/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/smile/app_install/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - usb_cam
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'usb_cam'
-- ==> add_subdirectory(usb_cam)
-- Configuring done
-- Generating done
-- Build files have been written to: /home/smile/app_install/catkin_ws/build
####
#### Running command: "make -j16 -l16" in "/home/smile/app_install/catkin_ws/build"
smile@smile-X3-S:~/app_install/catkin_ws$
进入工作目录并下载usb_cam包
git clone https:
smile@smile-X3-S:~/app_install/catkin_ws$ ls
build devel src
smile@smile-X3-S:~/app_install/catkin_ws$ cd src
smile@smile-X3-S:~/app_install/catkin_ws/src$ git clone https:
fatal: destination path 'usb_cam' already exists and is not an empty directory.
把之前新建的usb_cam删掉
然后在下载一下
smile@smile-X3-S:~/app_install/catkin_ws/src$ git clone https:
Cloning into 'usb_cam'...
remote: Enumerating objects: 1481, done.
remote: Counting objects: 0% (1/307remote: Counting objects: 1% (4/307remote: Counting objects: 2% (7/307remote: Counting objects: 3% (10/30remote: Counting objects: 4% (13/30remote: Counting objects: 5% (16/30remote: Counting objects: 6% (19/30remote: Counting objects: 7% (22/30remote: Counting objects: 8% (25/30remote: Counting objects: 9% (28/30remote: Counting objects: 10% (31/30remote: Counting objects: 11% (34/30remote: Counting objects: 12% (37/30remote: Counting objects: 13% (40/30remote: Counting objects: 14% (43/30remote: Counting objects: 15% (47/30remote: Counting objects: 16% (50/30remote: Counting objects: 17% (53/30remote: Counting objects: 18% (56/30remote: Counting objects: 19% (59/30remote: Counting objects: 20% (62/30remote: Counting objects: 21% (65/30remote: Counting objects: 22% (68/30remote: Counting objects: 23% (71/30remote: Counting objects: 24% (74/30remote: Counting objects: 25% (77/30remote: Counting objects: 26% (80/30remote: Counting objects: 27% (83/30remote: Counting objects: 28% (86/30remote: Counting objects: 29% (90/30remote: Counting objects: 30% (93/30remote: Counting objects: 31% (96/30remote: Counting objects: 32% (99/30remote: Counting objects: 33% (102/3remote: Counting objects: 34% (105/3remote: Counting objects: 35% (108/3remote: Counting objects: 36% (111/3remote: Counting objects: 37% (114/3remote: Counting objects: 38% (117/3remote: Counting objects: 39% (120/3remote: Counting objects: 40% (123/3remote: Counting objects: 41% (126/3remote: Counting objects: 42% (129/3remote: Counting objects: 43% (133/3remote: Counting objects: 44% (136/3remote: Counting objects: 45% (139/3remote: Counting objects: 46% (142/3remote: Counting objects: 47% (145/3remote: Counting objects: 48% (148/3remote: Counting objects: 49% (151/3remote: Counting objects: 50% (154/3remote: Counting objects: 51% (157/3remote: Counting objects: 52% (160/3remote: Counting objects: 53% (163/3remote: Counting objects: 54% (166/3remote: Counting objects: 55% (169/3remote: Counting objects: 56% (172/3remote: Counting objects: 57% (175/3remote: Counting objects: 58% (179/3remote: Counting objects: 59% (182/3remote: Counting objects: 60% (185/3remote: Counting objects: 61% (188/3remote: Counting objects: 62% (191/3remote: Counting objects: 63% (194/3remote: Counting objects: 64% (197/3remote: Counting objects: 65% (200/3remote: Counting objects: 66% (203/3remote: Counting objects: 67% (206/3remote: Counting objects: 68% (209/3remote: Counting objects: 69% (212/3remote: Counting objects: 70% (215/3remote: Counting objects: 71% (218/3remote: Counting objects: 72% (222/3remote: Counting objects: 73% (225/3remote: Counting objects: 74% (228/3remote: Counting objects: 75% (231/3remote: Counting objects: 76% (234/3remote: Counting objects: 77% (237/3remote: Counting objects: 78% (240/3remote: Counting objects: 79% (243/3remote: Counting objects: 80% (246/3remote: Counting objects: 81% (249/3remote: Counting objects: 82% (252/3remote: Counting objects: 83% (255/3remote: Counting objects: 84% (258/3remote: Counting objects: 85% (261/3remote: Counting objects: 86% (265/3remote: Counting objects: 87% (268/3remote: Counting objects: 88% (271/3remote: Counting objects: 89% (274/3remote: Counting objects: 90% (277/3remote: Counting objects: 91% (280/3remote: Counting objects: 92% (283/3remote: Counting objects: 93% (286/3remote: Counting objects: 94% (289/3remote: Counting objects: 95% (292/3remote: Counting objects: 96% (295/3remote: Counting objects: 97% (298/3remote: Counting objects: 98% (301/3remote: Counting objects: 99% (304/3remote: Counting objects: 100% (307/3remote: Counting objects: 100% (307/307), done.
remote: Compressing objects: 0% (1/remote: Compressing objects: 1% (2/remote: Compressing objects: 2% (4/remote: Compressing objects: 3% (5/remote: Compressing objects: 4% (7/remote: Compressing objects: 5% (8/remote: Compressing objects: 6% (10remote: Compressing objects: 7% (12remote: Compressing objects: 8% (13remote: Compressing objects: 9% (15remote: Compressing objects: 10% (16remote: Compressing objects: 11% (18remote: Compressing objects: 12% (19remote: Compressing objects: 13% (21remote: Compressing objects: 14% (23remote: Compressing objects: 15% (24remote: Compressing objects: 16% (26remote: Compressing objects: 17% (27remote: Compressing objects: 18% (29remote: Compressing objects: 19% (31remote: Compressing objects: 20% (32remote: Compressing objects: 21% (34remote: Compressing objects: 22% (35remote: Compressing objects: 23% (37remote: Compressing objects: 24% (38remote: Compressing objects: 25% (40remote: Compressing objects: 26% (42remote: Compressing objects: 27% (43remote: Compressing objects: 28% (45remote: Compressing objects: 29% (46remote: Compressing objects: 30% (48remote: Compressing objects: 31% (49remote: Compressing objects: 32% (51remote: Compressing objects: 33% (53remote: Compressing objects: 34% (54remote: Compressing objects: 35% (56remote: Compressing objects: 36% (57remote: Compressing objects: 37% (59remote: Compressing objects: 38% (61remote: Compressing objects: 39% (62remote: Compressing objects: 40% (64remote: Compressing objects: 41% (65remote: Compressing objects: 42% (67remote: Compressing objects: 43% (68remote: Compressing objects: 44% (70remote: Compressing objects: 45% (72remote: Compressing objects: 46% (73remote: Compressing objects: 47% (75remote: Compressing objects: 48% (76remote: Compressing objects: 49% (78remote: Compressing objects: 50% (79remote: Compressing objects: 51% (81remote: Compressing objects: 52% (83remote: Compressing objects: 53% (84remote: Compressing objects: 54% (86remote: Compressing objects: 55% (87remote: Compressing objects: 56% (89remote: Compressing objects: 57% (91remote: Compressing objects: 58% (92remote: Compressing objects: 59% (94remote: Compressing objects: 60% (95remote: Compressing objects: 61% (97remote: Compressing objects: 62% (98remote: Compressing objects: 63% (10remote: Compressing objects: 64% (10remote: Compressing objects: 65% (10remote: Compressing objects: 66% (10remote: Compressing objects: 67% (10remote: Compressing objects: 68% (10remote: Compressing objects: 69% (11remote: Compressing objects: 70% (11remote: Compressing objects: 71% (11remote: Compressing objects: 72% (11remote: Compressing objects: 73% (11remote: Compressing objects: 74% (11remote: Compressing objects: 75% (11remote: Compressing objects: 76% (12remote: Compressing objects: 77% (12remote: Compressing objects: 78% (12remote: Compressing objects: 79% (12remote: Compressing objects: 80% (12remote: Compressing objects: 81% (12remote: Compressing objects: 82% (13remote: Compressing objects: 83% (13remote: Compressing objects: 84% (13remote: Compressing objects: 85% (13remote: Compressing objects: 86% (13remote: Compressing objects: 87% (13remote: Compressing objects: 88% (14remote: Compressing objects: 89% (14remote: Compressing objects: 90% (14remote: Compressing objects: 91% (14remote: Compressing objects: 92% (14remote: Compressing objects: 93% (14remote: Compressing objects: 94% (14remote: Compressing objects: 95% (15remote: Compressing objects: 96% (15remote: Compressing objects: 97% (15remote: Compressing objects: 98% (15remote: Compressing objects: 99% (15remote: Compressing objects: 100% (15remote: Compressing objects: 100% (158/158), done.
Receiving objects: 50% (741/1481), 2Receiving objects: 51% (756/1481), 2Receiving objects: 52% (771/1481), 2Receiving objects: 53% (785/1481), 2Receiving objects: 54% (800/1481), 2Receiving objects: 55% (815/1481), 2Receiving objects: 56% (830/1481), 2Receiving objects: 57% (845/1481), 2Receiving objects: 58% (859/1481), 2Receiving objects: 59% (874/1481), 2Receiving objects: 60% (889/1481), 2Receiving objects: 61% (904/1481), 2Receiving objects: 62% (919/1481), 2Receiving objects: 63% (934/1481), 2Receiving objects: 64% (948/1481), 2Receiving objects: 65% (963/1481), 2Receiving objects: 66% (978/1481), 2Receiving objects: 67% (993/1481), 2Receiving objects: 68% (1008/1481), Receiving objects: 69% (1022/1481), Receiving objects: 70% (1037/1481), Receiving objects: 71% (1052/1481), Receiving objects: 72% (1067/1481), Receiving objects: 73% (1082/1481), Receiving objects: 74% (1096/1481), Receiving objects: 75% (1111/1481), Receiving objects: 76% (1126/1481), Receiving objects: 77% (1141/1481), Receiving objects: 78% (1156/1481), Receiving objects: 79% (1170/1481), Receiving objects: 80% (1185/1481), Receiving objects: 81% (1200/1481), Receiving objects: 82% (1215/1481), Receiving objects: 83% (1230/1481), Receiving objects: 84% (1245/1481), Receiving objects: 85% (1259/1481), Receiving objects: 86% (1274/1481), Receiving objects: 87% (1289/1481), remote: Total 1481 (delta 145), reused 230 (delta 116), pack-reused 1174
Receiving objects: 88% (1304/1481), Receiving objects: 89% (1319/1481), Receiving objects: 90% (1333/1481), Receiving objects: 91% (1348/1481), Receiving objects: 92% (1363/1481), Receiving objects: 93% (1378/1481), Receiving objects: 94% (1393/1481), Receiving objects: 95% (1407/1481), Receiving objects: 96% (1422/1481), Receiving objects: 97% (1437/1481), Receiving objects: 98% (1452/1481), Receiving objects: 99% (1467/1481), Receiving objects: 100% (1481/1481), Receiving objects: 100% (1481/1481), 618.33 KiB | 827.00 KiB/s, done.
Resolving deltas: 100% (610/610), done.
smile@smile-X3-S:~/app_install/catkin_ws/src$
编译
cd ..
catkin_make
过程如下
smile@smile-X3-S:~/app_install/catkin_ws/src$ cd ..
smile@smile-X3-S:~/app_install/catkin_ws$ catkin_make
Base path: /home/smile/app_install/catkin_ws
Source space: /home/smile/app_install/catkin_ws/src
Build space: /home/smile/app_install/catkin_ws/build
Devel space: /home/smile/app_install/catkin_ws/devel
Install space: /home/smile/app_install/catkin_ws/install
####
#### Running command: "make cmake_check_build_system" in "/home/smile/app_install/catkin_ws/build"
####
-- Using CATKIN_DEVEL_PREFIX: /home/smile/app_install/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /home/smile/app_install/catkin_ws/devel;/opt/ros/melodic
-- This workspace overlays: /home/smile/app_install/catkin_ws/devel;/opt/ros/melodic
-- Found PythonInterp: /usr/bin/python2 (found suitable version "2.7.17", minimum required is "2")
-- Using PYTHON_EXECUTABLE: /usr/bin/python2
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/smile/app_install/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/googletest': gtests will be built
-- Found gmock sources under '/usr/src/googletest': gmock will be built
-- Found PythonInterp: /usr/bin/python2 (found version "2.7.17")
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.29
-- BUILD_SHARED_LIBS is on
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 1 packages in topological order:
-- ~~ - usb_cam
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin package: 'usb_cam'
-- ==> add_subdirectory(usb_cam)
-- Found PkgConfig: /usr/bin/pkg-config (found version "0.29.1")
-- Checking for module 'libavcodec'
-- Found libavcodec, version 57.107.100
-- Checking for module 'libswscale'
-- Found libswscale, version 4.8.100
-- Configuring done
-- Generating done
-- Build files have been written to: /home/smile/app_install/catkin_ws/build
####
#### Running command: "make -j16 -l16" in "/home/smile/app_install/catkin_ws/build"
####
Scanning dependencies of target usb_cam
[ 25%] Building CXX object usb_cam/CMakeFiles/usb_cam.dir/src/usb_cam.cpp.o
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp: In member function ‘int usb_cam::UsbCam::init_mjpeg_decoder(int, int)’:
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:386:89: warning: ‘int avpicture_alloc(AVPicture*, AVPixelFormat, int, int)’ is deprecated [-Wdeprecated-declarations]
T_RGB24, image_width, image_height);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:5626:5: note: declared here
int avpicture_alloc(AVPicture *picture, enum AVPixelFormat pix_fmt, int width, int height);
^~~~~~~~~~~~~~~
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:397:90: warning: ‘int avpicture_get_size(AVPixelFormat, int, int)’ is deprecated [-Wdeprecated-declarations]
YUV422P, image_width, image_height);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:5653:5: note: declared here
int avpicture_get_size(enum AVPixelFormat pix_fmt, int width, int height);
^~~~~~~~~~~~~~~~~~
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:398:85: warning: ‘int avpicture_get_size(AVPixelFormat, int, int)’ is deprecated [-Wdeprecated-declarations]
T_RGB24, image_width, image_height);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:5653:5: note: declared here
int avpicture_get_size(enum AVPixelFormat pix_fmt, int width, int height);
^~~~~~~~~~~~~~~~~~
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp: In member function ‘void usb_cam::UsbCam::mjpeg2rgb(char*, int, char*, int)’:
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:422:94: warning: ‘int avcodec_decode_video2(AVCodecContext*, AVFrame*, int*, const AVPacket*)’ is deprecated [-Wdeprecated-declarations]
rame_camera_, &got_picture, &avpkt);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:4993:5: note: declared here
int avcodec_decode_video2(AVCodecContext *avctx, AVFrame *picture,
^~~~~~~~~~~~~~~~~~~~~
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:441:76: warning: ‘int avpicture_get_size(AVPixelFormat, int, int)’ is deprecated [-Wdeprecated-declarations]
ec_context_->pix_fmt, xsize, ysize);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:5653:5: note: declared here
int avpicture_get_size(enum AVPixelFormat pix_fmt, int width, int height);
^~~~~~~~~~~~~~~~~~
/home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:454:123: warning: ‘int avpicture_layout(const AVPicture*, AVPixelFormat, int, int, unsigned char*, int)’ is deprecated [-Wdeprecated-declarations]
(uint8_t *)RGB, avframe_rgb_size_);
^
In file included from /home/smile/app_install/catkin_ws/src/usb_cam/include/usb_cam/usb_cam.h:44:0,
from /home/smile/app_install/catkin_ws/src/usb_cam/src/usb_cam.cpp:55:
/usr/include/x86_64-linux-gnu/libavcodec/avcodec.h:5645:5: note: declared here
int avpicture_layout(const AVPicture *src, enum AVPixelFormat pix_fmt,
^~~~~~~~~~~~~~~~
[ 50%] Linking CXX shared library /home/smile/app_install/catkin_ws/devel/lib/libusb_cam.so
[ 50%] Built target usb_cam
Scanning dependencies of target usb_cam_node
[ 75%] Building CXX object usb_cam/CMakeFiles/usb_cam_node.dir/nodes/usb_cam_node.cpp.o
[100%] Linking CXX executable /home/smile/app_install/catkin_ws/devel/lib/usb_cam/usb_cam_node
[100%] Built target usb_cam_node
smile@smile-X3-S:~/app_install/catkin_ws$
上面的编译过程中,到了100%就行,可能会报红或者警告,不要管他;
启动节点测试roslaunch us b_cam usb_cam-test.launch
这里因为没有告诉新开的终端准备要用包的路径,所以会报错
smile@smile-X3-S:~/app_install/catkin_ws$ roslaunch us
b_cam usb_cam-test.launch
RLException: [usb_cam-test.launch] is neither a launch file in package [usb_cam] nor is [usb_cam] a launch file name
The traceback for the exception was written to the log file
在工作路径下source一下(如果用这个方法,每次打开一个终端都需要一次source!)
source devel/setup.bash
如果不设置好source,那你就无法在新终端下run起来,会报错找不到roslaunch文件
bash: /home/smile/app_install/catkin_ws/devel/setup.bash: Permission denied
smile@smile-X3-S:~$ roslaunch usb_cam usb_cam-test.launch
RLException: [usb_cam-test.launch] is neither a launch file in package [usb_cam] nor is [usb_cam] a launch file name
The traceback for the exception was written to the log file
也可以一劳永逸source
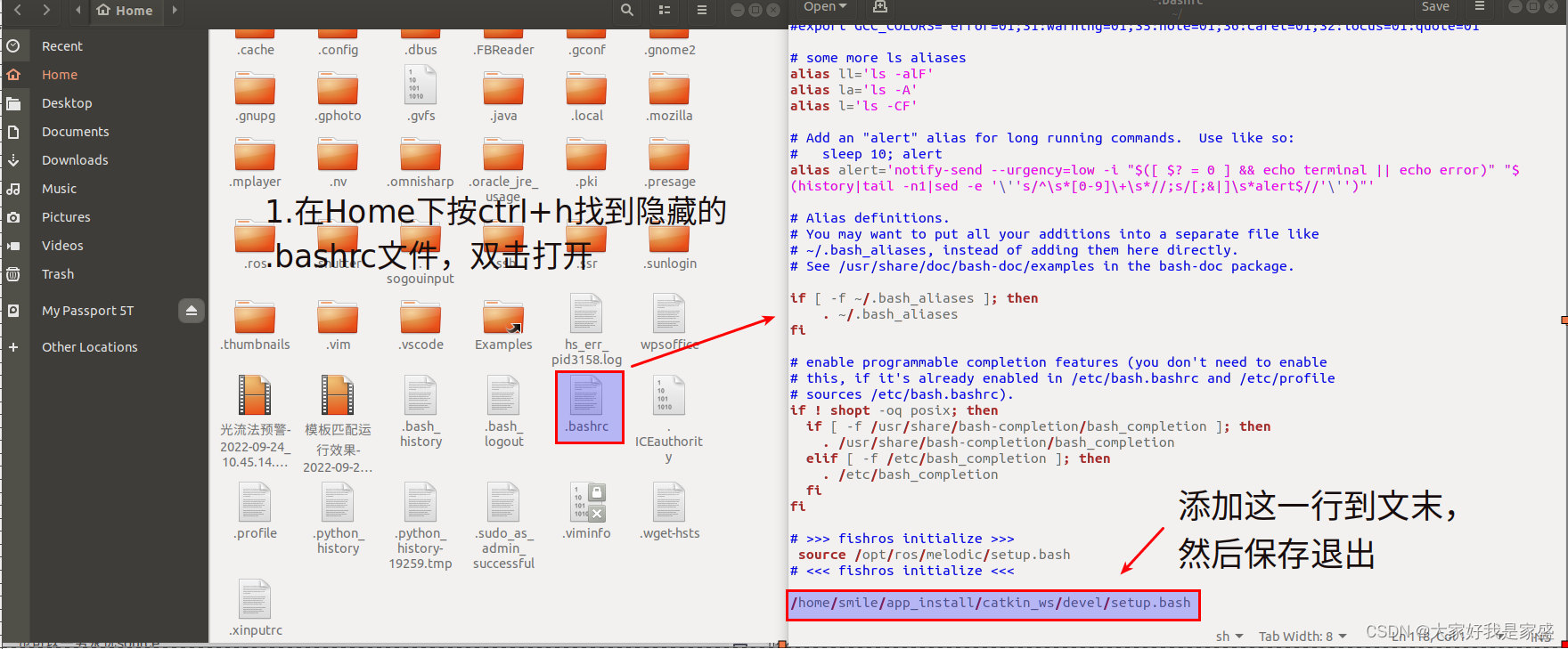
为了不每次运行程序的时候都source一次devel文件夹里的setup.bash,可以打开主目录 按下Crtl+h 显示隐藏文件,双击打开bashrc文件,或者到这个目录下打开终端然后:sudo gedit .bashrc
在最后加入
source/home/############/catkin_ws/devel/setup.bash,其中###部分为你的计算机账户,保存后再重新打开终端,显示无错误即可。
source /home/smile/app_install/catkin_ws/devel/setup.bash
如果不加source后面就会报错:bash: /home/smile/app_install/catkin_ws/devel/setup.bash: Permission denied
修改好后,激活一下source ~/.bashrc
就可以用了
smile@smile-X3-S:~/
catkin_wssmile@smile-X3-S:~/app_install/catkin_ws$ roslaunch us
b_cam usb_cam-test.launch
RLException: [usb_cam-test.launch] is neither a launch file in package [usb_cam] nor is [usb_cam] a launch file name
The traceback for the exception was written to the log file
smile@smile-X3-S:~/
catkin_wssmile@smile-X3-S:~/app_install/catkin_ws$ source devel
/setup.bash
smile@smile-X3-S:~/
catkin_wssmile@smile-X3-S:~/app_install/catkin_ws$ source devel roslaunch us
b_cam usb_cam-test.launch
... logging to /home/smile/.ros/log/156d2af4-4390-11ed-a099-3c58c26f458c/roslaunch-smile-X3-S-26383.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http:
SUMMARY
========
PARAMETERS
* /image_view/autosize: True
* /rosdistro: melodic
* /rosversion: 1.14.13
* /usb_cam/camera_frame_id: usb_cam
* /usb_cam/image_height: 480
* /usb_cam/image_width: 640
* /usb_cam/io_method: mmap
* /usb_cam/pixel_format: yuyv
* /usb_cam/video_device: /dev/video0
NODES
/
image_view (image_view/image_view)
usb_cam (usb_cam/usb_cam_node)
auto-starting new master
process[master]: started with pid [26393]
ROS_MASTER_URI=http:
setting /run_id to 156d2af4-4390-11ed-a099-3c58c26f458c
process[rosout-1]: started with pid [26404]
started core service [/rosout]
process[usb_cam-2]: started with pid [26407]
process[image_view-3]: started with pid [26411]
[ INFO] [1664852163.724025585]: Initializing nodelet with 16 worker threads.
[ INFO] [1664852163.736597435]: using default calibration URL
[ INFO] [1664852163.736978102]: camera calibration URL: file:
[ INFO] [1664852163.737007231]: Unable to open camera calibration file [/home/smile/.ros/camera_info/head_camera.yaml]
[ WARN] [1664852163.737016572]: Camera calibration file /home/smile/.ros/camera_info/head_camera.yaml not found.
[ INFO] [1664852163.737028096]: Starting 'head_camera' (/dev/video0) at 640x480 via mmap (yuyv) at 30 FPS
[ INFO] [1664852163.777121709]: Using transport "raw"
[ WARN] [1664852163.806821536]: unknown control 'white_balance_temperature_auto'
[ WARN] [1664852163.808830397]: unknown control 'focus_auto'
^C[image_view-3] killing on exit
[usb_cam-2] killing on exit
[rosout-1] killing on exit
[master] killing on exit
shutting down processing monitor...
... shutting down processing monitor complete
done
2.3 启动usb相机节点
A.查找摄像头接口
ls /dev/video*
这里可以先在插入usb摄像头的时候检查一下接口,然后拔出usb摄像头的时候再检查一下接口(看看少了哪些,少了的就是usb摄像头的)
很明显, /dev/video2 或者 /dev/video3 是我的摄像头usb接口号(好像ubuntu下摄像头是有两个号的,用任意一个就可以了);
B.在该路径下修改launch文件,换成你自己的摄像头接口
到达该路径:
cd /opt/ros/noetic/share/usb_cam/launch/
编辑该文件
sudo gedit usb_cam-test.launch
原本这里是 /dev/video0,将其改为/dev/video2
保存后退出,然后运行:
roslaunch usb_cam usb_cam-test.launch
然后就可以运行摄像头了:
如果报错:ERROR: cannot launch node of type [image_view/image_view]: image_viewROS path [0]=/opt/ros/noetic/s
ERROR: cannot launch node of type [image_view/image_view]: image_view
ROS path [0]=/opt/ros/noetic/share/ros
ROS path [1]=/home/zxf/catkin_ws/src
ROS path [2]=/opt/ros/noetic/share
解决方法:
sudo apt-get install ros-noetic-image-view
注意:noetic那个地方为ROS版本号,需要替换为自己的。后面的image-view来源于自己的报错信息,注意查看,如果出现无法定位软件包,改连接符"-“为”_"试试。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)