树莓派键盘布局,英式键盘换成没事键盘,解决#@无法输入问题
树莓派默认情况下,输入#得到的是这个£符号,输入@得到的是"这个符号
因为树莓派的系统默认是英文环境,使用的是英国键盘布局(UK)
而大陆使用的是美国标准键盘布局(US)
终端中输入命令
sudo apt install fcitx
回车
reboot
回车
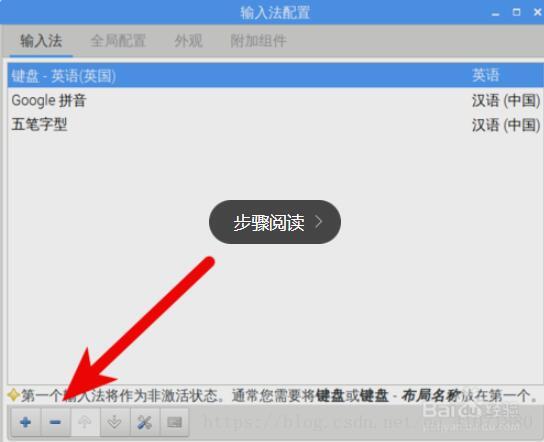
右键这个小键盘,点击:configure current input method

点击减号,吧keyboard-English(UK)删掉
然后点击加号,找到English(us),点击OK
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)