uC/OS-II简介
uC/OS-II由Micrium公司提供,是一个可移植、可固化的、可裁剪的、占先式多任务实时内核,它适用于多种微处理器,微控制器和数字处理芯片(已经移植到超过100种以上的微处理器应用中)。同时,该系统源代码开放、整洁、一致,注释详尽,适合系统开发。 uC/OS-II已经通过联邦航空局(FAA)商用航行器认证,符合航空无线电技术委员会(RTCA)DO-178B标准。
我们常见的嵌入式操作一同可以大致分为四层,分别是功能层、软件层、中间层和硬件层。其中我们使用的uC/OS-II就位于中间层,具体如下图所示:
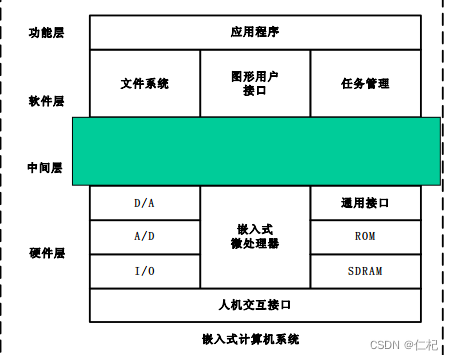
严格地说uC/OS-II只是一个实时操作系统内核,它仅仅包含了任务调度,任务管理,时间管理,内存管理和任务间的通信和同步等基本功能。没有提供输入输出管理,文件系统,网络等额外的服务。但由于uC/OS-II良好的可扩展性和源码开放,这些非必须的功能完全可以由用户自己根据需要分别实现。
uC/OS-II移植
首先我们先要准备一个一直所需的基本工程,本教程适用于STM32F103系列芯片。其次我们需要获取uC/OS-II的源码,源码我们可以直接从Micrium官网下载,需要我们首先登录该网站,第一次登陆需要进行注册。下载地址:
Micrium uC-Eval-STM32F107 - Weston Embedded Solutions (weston-embedded.com)
登陆官网之后,我们首先找到下载地址如下图所示:
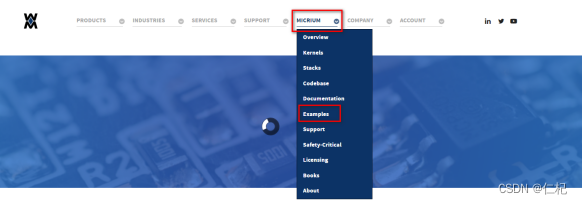
然后我们点击EXMAPLE,并选择STM系列的芯片相关例子,具体操作如下图
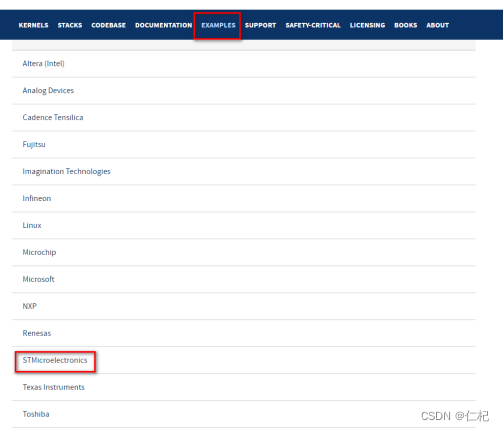
选择ST相关芯片之后然后点击在搜索栏输入我们所需要的使用的芯片类型,由于我们实在STM32F103开发板上移植,所以我们选择同系列的STM32F10B系列实例即可。具体操作如下图所示:

下载完之后会显示一个如下图所示的可执行文件,点击打开之后我们就就可以将对应的源码文件解压到指定的目录之下:

解压过程下图所示,我们需要先点击Browse选择解压路径,然后点击Unzip解压即可

解压完成之后,我们可以打开对应的路径,我们所需要用到的内容如下图所示:
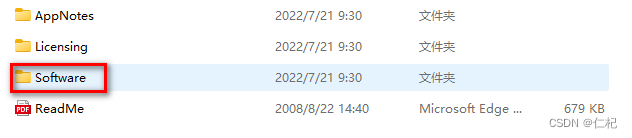
至此,我们的源码就以获取完毕,准备工作已经完成。接下来我们就可以开始移植操作了。
移植步骤
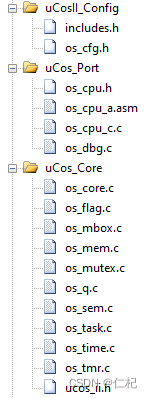
首先我们需要在模板工程里新建一个uCosII文件夹,然后再文件夹里新建三个子文件夹Config、Core和Port。其中Config用来存放我们对uCosII操作系统的配置文件,Core用来存放uCosII的源码,Port用来存放和CPU的接口文件。具体操作如下图所示:

接下来我们就是向指定文件夹移植对应的文件即可,首先我们需要向Config文件夹里移植如下图所示两个文件,其中 includes.h 里面都是一些头文件,os_cfg.h 文件主要是用来 配置和裁剪UCOSII 的。
这两个文件我们可以从源码里获取,具体路径:
Micrium\Software\EvalBoards\ST\STM3210E-EVAL\RVMDK\OS-Probe
然后向Core文件夹内移植uCosII的源码,具体内容如下图所示:

内核源码我们可以从源码里获取,具体路径:
Micrium\Software\uCOS-II\Source
然后我们移植CPU接口文件,具体内容如下图所示:
这几个文件在源码中的具体路径如下:
Micrium\Software\uCOS-II\Ports\ARM-Cortex-M3\Generic\RealView
至此所有的文件就已经移植完成,接下来我们就需要对工程进行配置了。
工程配置
首先在工程目录中创建一下三个分组,如下图所示:
然后分别向三个目录中添加对应的文件夹里的c文件和.a文件,注意在添加内核文件时不要将ucos_ii.c文件添加到工程里。文件添加完成后的效果如下图所示:
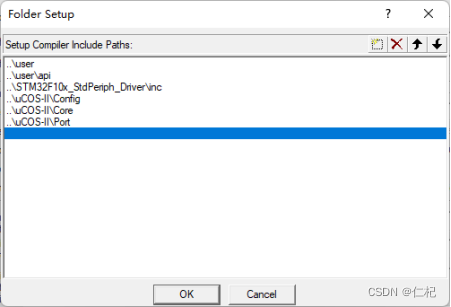
添加完文件之后需要将头文件的路径一并给添加到工程里,具体如下图所示:
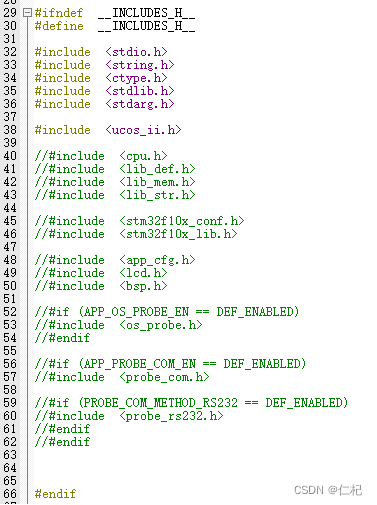
此时直接编译会提示找不到app_cfg.h文件,因为我们没有将这个文件添加到自己的目录中,所以直接将#include <app_cfg.h>替换为#include “includes.h”,然后修改includs.h文件将无关的头文件给屏蔽掉。具体操作如下图所示:


屏蔽之后还会提示一些钩子函数未定义,此时我们需要在配置文件里将钩子函数给关闭,找到os_cfg.h文件的第30行,将1改为0即可。具体操作如下图

修改完之后在编译一次,会提示另外一个函数未定义,如下图所示所示:

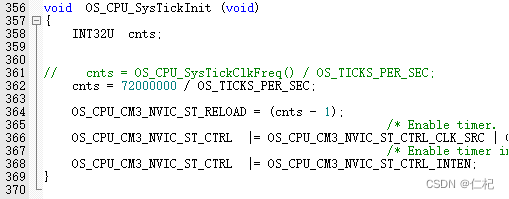
我们找到os_cpu_c.c文件,然后将361行的OS_CPU_SysTickClkFreq()函数直接修改为单片机的时钟频率也就是72000000。具体操作如下图所示:
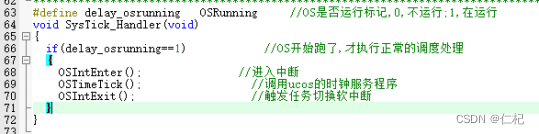
此时我们在编译就不会再出错了,但是我们还需要进行以下操作让uCosII系统跑起来。我们将uCosII系统运行所依赖的函数放到系统定时器的中断函数里运行,如图29.17所示,然后将STM32启动文件里出现pendSV_Handler的地方全部修改为OS_CPU_PendSVHandler,因为上了操作系统之后,上下文切换的中断会由uCosII来执行。具体内容如下图所示:
 、、
、、


至此uC/OS_II就已经完全移植完成。
基础任务创建和删除实验
我们在主函数直接创建两个LED灯的任务分别控制LED1和LED2,并且在LED1任务运行5次之后删除LED2的任务,具体代码如下:
#include "main.h"
#include "delay.h"
#include "led.h"
#include "key.h"
#include "usart.h"
#include "includes.h"
#define START_TASK_PRIO 10
#define START_STK_SIZE 64
OS_STK START_TASK_STK[START_STK_SIZE];
void start_task(void *pdata);
#define LED1_TASK_PRIO 7
#define LED1_STK_SIZE 64
OS_STK LED1_TASK_STK[LED1_STK_SIZE];
void led1_task(void *pdata);
#define LED2_TASK_PRIO 8
#define LED2_STK_SIZE 64
OS_STK LED2_TASK_STK[LED2_STK_SIZE];
void led2_task(void *pdata);
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
SysTick_Config(72000);
Led_Config();
Beep_Config();
RGB_Config();
Relay_Config();
Key_Config();
USART1_Config(115200);
OSInit();
OSTaskCreate(start_task,(void *)0,(OS_STK *)&START_TASK_STK[START_STK_SIZE-1],START_TASK_PRIO );
OSStart();
while(1)
{
}
}
void start_task(void *pdata)
{
OS_CPU_SR cpu_sr=0;
pdata = pdata;
OSStatInit();
OS_ENTER_CRITICAL();
OSTaskCreate(led1_task,(void *)0,(OS_STK*)&LED1_TASK_STK[LED1_STK_SIZE-1],LED1_TASK_PRIO);
OSTaskCreate(led2_task,(void *)0,(OS_STK*)&LED2_TASK_STK[LED2_STK_SIZE-1],LED2_TASK_PRIO);
OSTaskSuspend(START_TASK_PRIO);
OS_EXIT_CRITICAL();
}
void led1_task(void *pdata)
{
uint8_t count=0;
while(1)
{
count++;
LED1_Toggle();
if(count==5)
{
printf("LED1任务删除LED2任务\r\n");
OSTaskDel(LED2_TASK_PRIO);
}
printf("LED1任务运行%d次\r\n",count);
OSTimeDly(1000);
}
}
void led2_task(void *pdata)
{
uint8_t count=0;
while(1)
{
count++;
LED2_Toggle();
printf("LED2任务运行%d次\r\n",count);
OSTimeDly(500);
}
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)