文章目录
非机动目标跟踪算法原理 一、Singer 模型算法 二、当前统计模型算法 三、交互多模型算法 实验仿真 一、低机动情况 1.1 Singer模型参数设置 1.2 当前统计模型参数设置 1.3交互多模型参数设置 1.4 对比分析 二、一般机动情况 2.1 Singer模型参数设置 2.2 当前统计模型算法 2.3 交互多模型算法 2.4 对比分析 三、高机动情况 3.1 Singer模型参数设置 3.2 当前统计模型算法参数设置 3.3 交互多模型算法 3.4 对比分析 部分代码
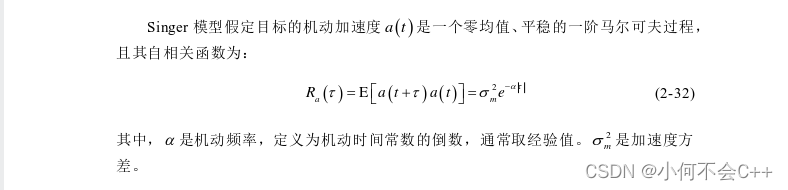
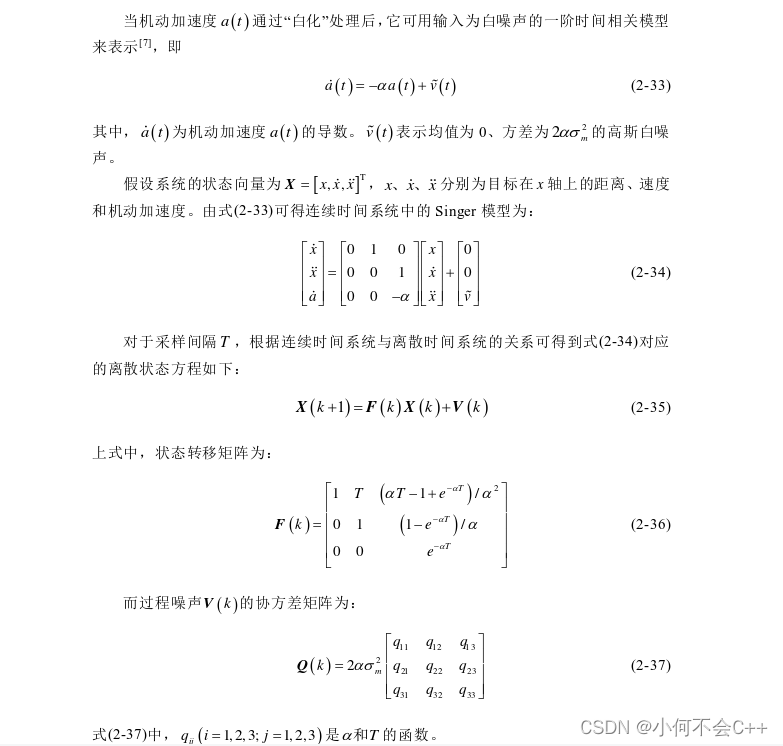
一、Singer 模型算法
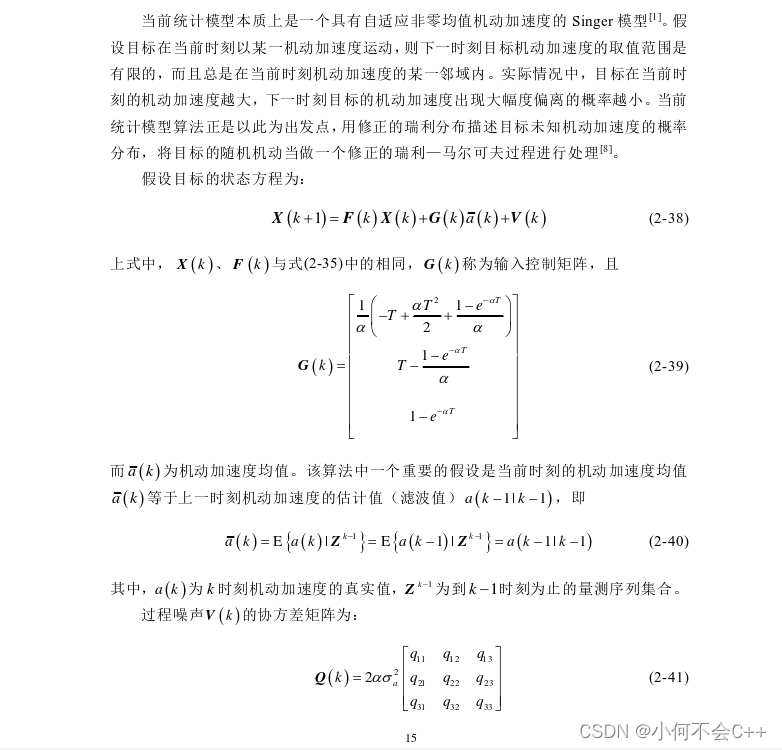
二、当前统计模型算法
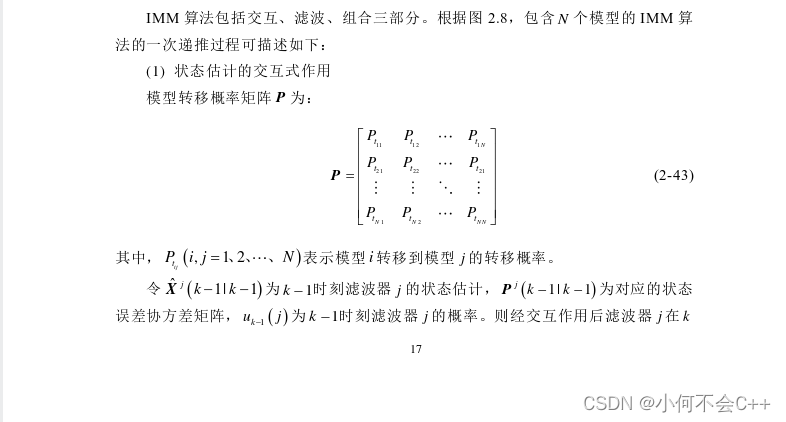
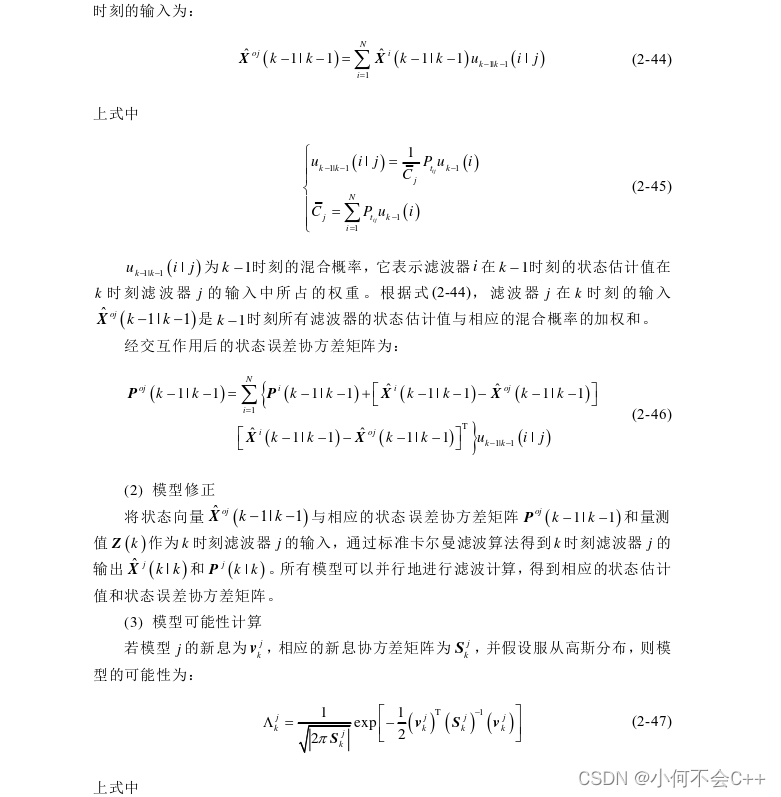
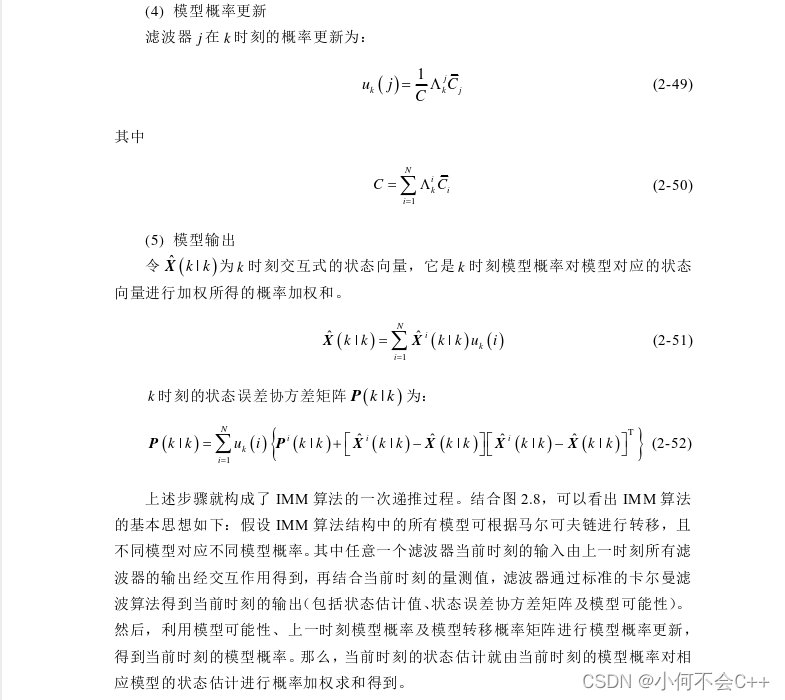
三、交互多模型算法
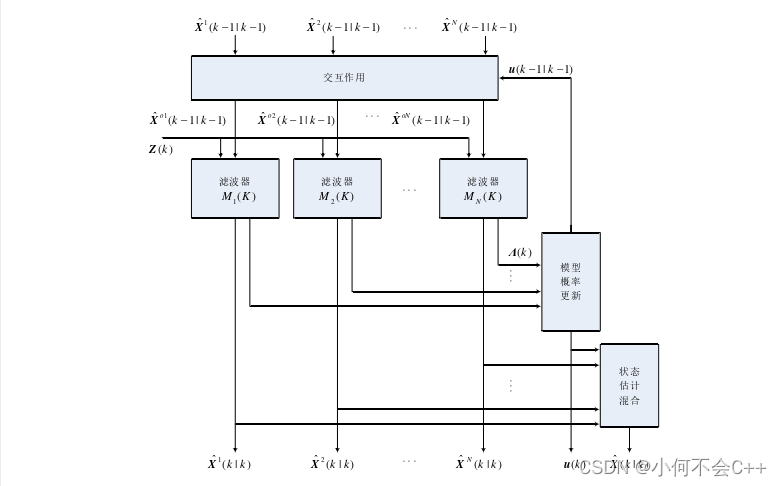
IMM算法流程图如下所示:
一、低机动情况
假设目标起始状态为
X
(
0
)
=
[
2000
m
,
0
m
/
s
,
10000
m
,
15
m
/
s
]
T
X(0)=[2000m,0m/s,10000m,15m/s]^T
X ( 0 ) = [ 2000 m , 0 m / s , 10000 m , 15 m / s ] T
700
s
700s
700 s
T
=
1
s
T=1s
T = 1 s
100
m
100m
100 m
目标发生机动时刻
t
=
200
t=200
t = 200
t
=
400
t=400
t = 400
t
=
410
t=410
t = 410
t
=
470
t=470
t = 470
x
x
x
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) 0.075 0 -0.25 0
y
y
y
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) -0.075 0 0.25 0
1.1 Singer模型参数设置
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
σ
m
2
=
0.4
\sigma^2_m=0.4
σ m 2 = 0.4
1.2 当前统计模型参数设置
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
a
m
a
x
=
1
m
/
s
2
a_{max}=1m/s^2
a ma x = 1 m / s 2
1.3交互多模型参数设置
采用三个模型,模型的过程噪声方差
q
q
q
P
=
[
0.8
0.15
0.05
0.3
0.4
0.3
0.05
0.15
0.8
]
P=\begin{bmatrix} 0.8 & 0.15 &0.05\\ 0.3 & 0.4&0.3\\0.05&0.15&0.8 \end{bmatrix}
P =
0.8 0.3 0.05 0.15 0.4 0.15 0.05 0.3 0.8
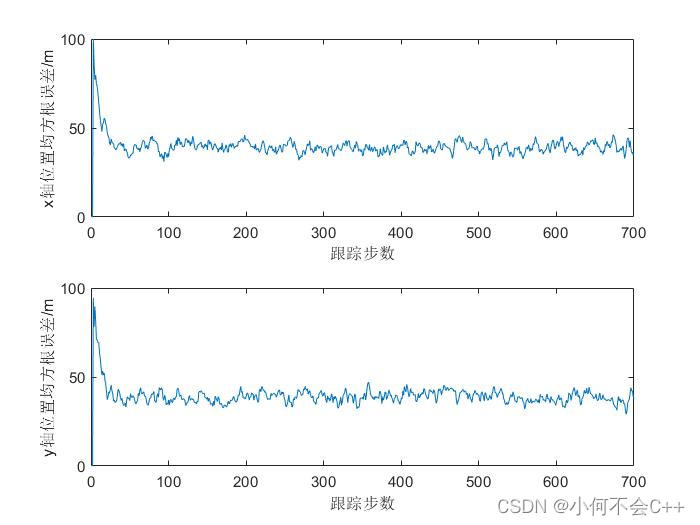
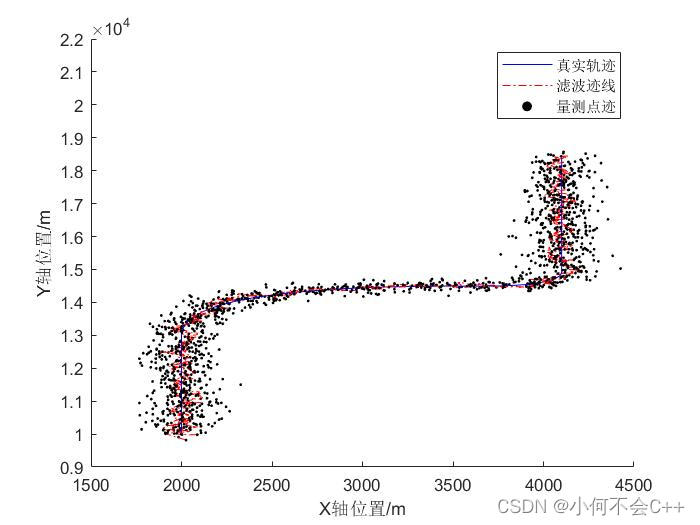
1.4 对比分析
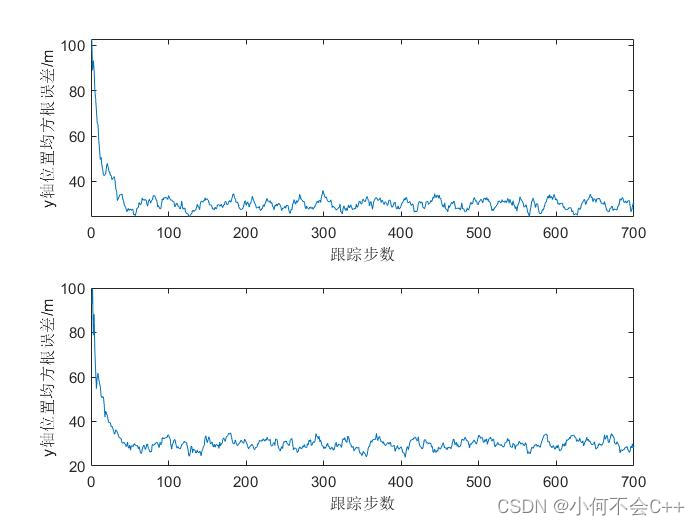
随着跟踪步数的增加,在低机动情况下Singer模型算法、当前统计模型算法和IMM算法在x轴和y轴上的位置均方根误差均逐渐收敛,且相应的收敛值均小于雷达的测距误差,这说明上述三种算法可实现对低机动目标的跟踪。对x轴和y轴上的位置均方根误差进行比较可知,Singer模型算法与当前统计模型算法十分接近,而IMM算法低于另外两种算法。由于IMM算法设置了多个模型,而不同的模型可以匹配目标在不同阶段的运动模型,因此IMM算法的跟踪 精度高于Singer模型算法和当前统计模型算法。根据前面的分析可知,在低机动情况 下IMM算法的跟踪精度比另外两种算法的高,当前统计模型算法的跟踪精度略高于Singer模型算法。
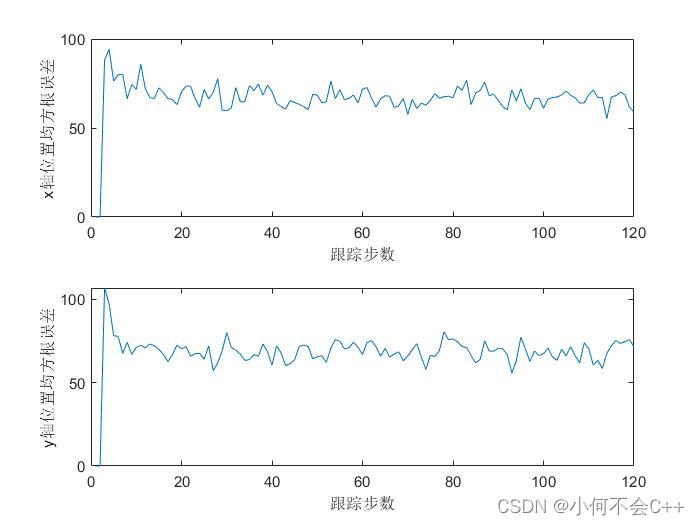
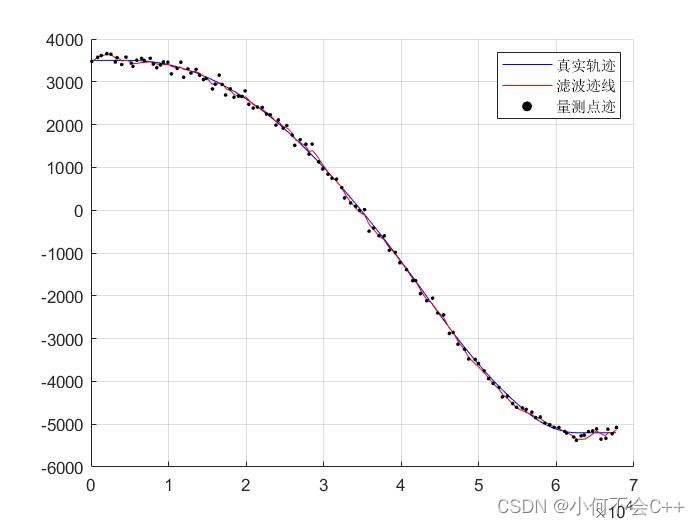
二、一般机动情况
假设目标起始状态为
X
(
0
)
=
[
0
m
,
500
m
/
s
,
3500
m
,
0
m
/
s
]
T
X(0)=[0m,500m/s,3500m,0m/s]^T
X ( 0 ) = [ 0 m , 500 m / s , 3500 m , 0 m / s ] T
120
s
120s
120 s
T
=
1
s
T=1s
T = 1 s
100
m
100m
100 m
目标发生机动时刻
t
=
10
t=10
t = 10
t
=
40
t=40
t = 40
t
=
80
t=80
t = 80
t
=
100
t=100
t = 100
t
=
110
t=110
t = 110
x
x
x
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) 0 5 -6 2 0
y
y
y
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) -2 -3 5 8 0
2.1 Singer模型参数设置
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
σ
m
2
=
416.67
\sigma^2_m=416.67
σ m 2 = 416.67
2.2 当前统计模型算法
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
a
m
a
x
=
25
m
/
s
2
a_{max}=25m/s^2
a ma x = 25 m / s 2
2.3 交互多模型算法
采用三个模型,模型的过程噪声方差
q
q
q
P
=
[
0.8
0.15
0.05
0.3
0.4
0.3
0.05
0.15
0.8
]
P=\begin{bmatrix} 0.8 & 0.15 &0.05\\ 0.3 & 0.4&0.3\\0.05&0.15&0.8 \end{bmatrix}
P =
0.8 0.3 0.05 0.15 0.4 0.15 0.05 0.3 0.8
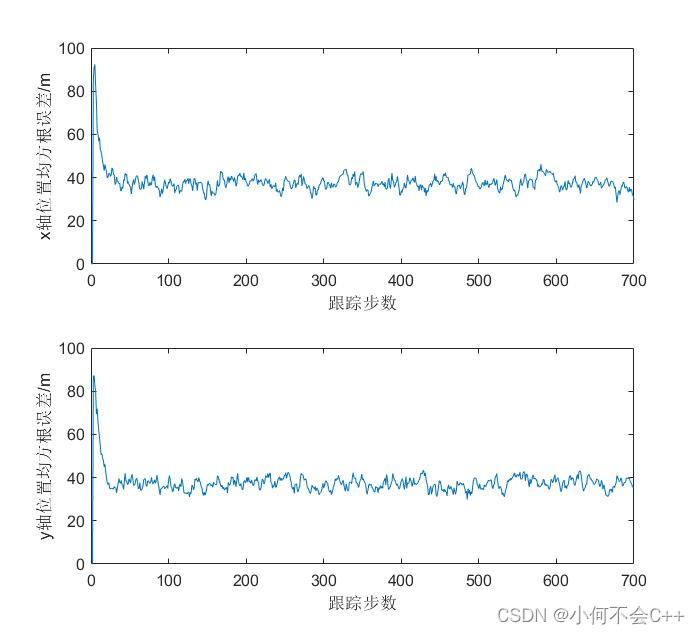
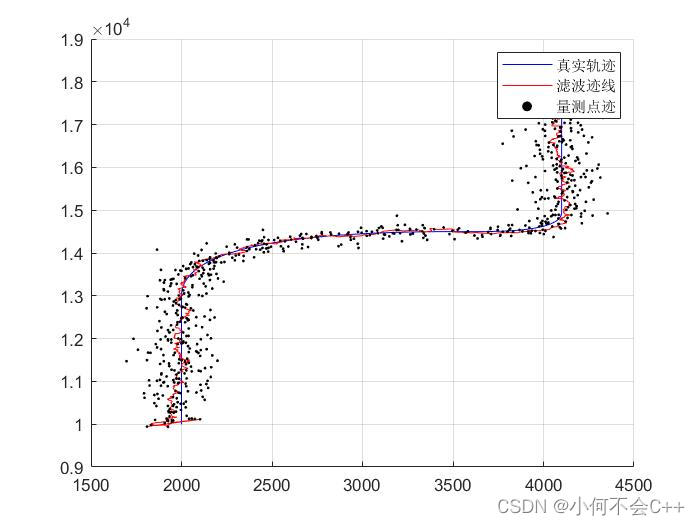
2.4 对比分析
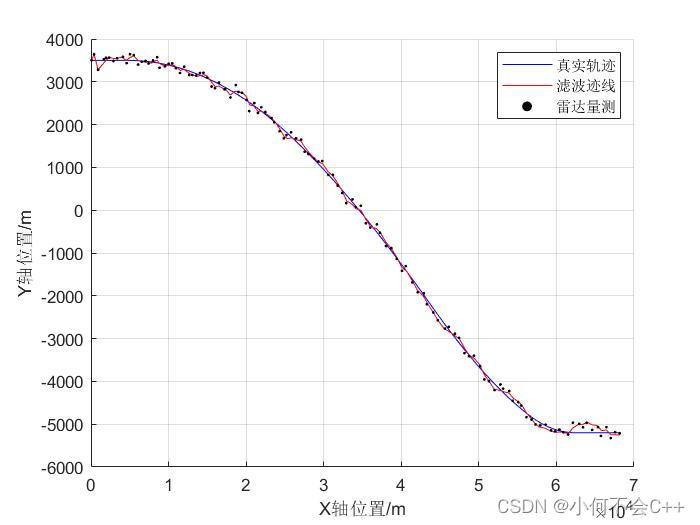
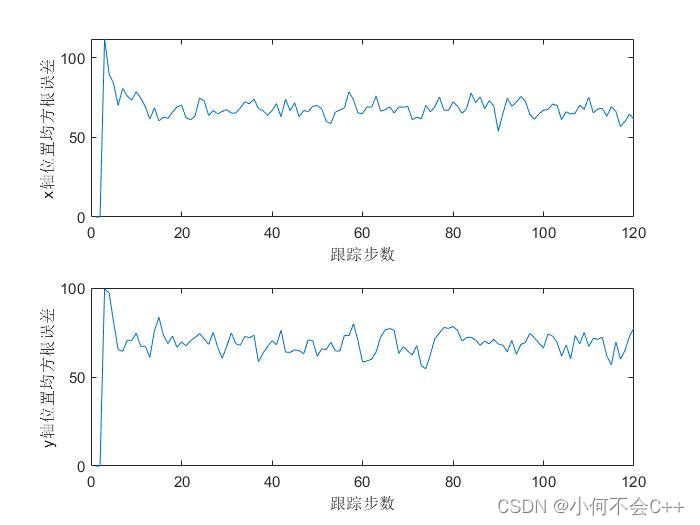
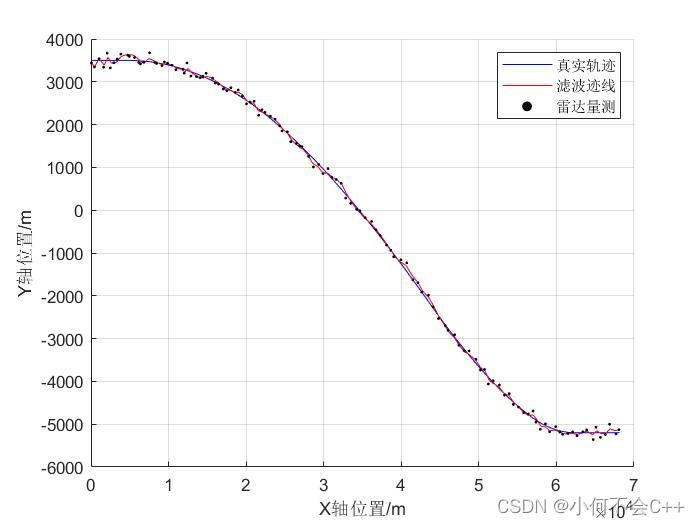
随着跟踪步数的增加,在一般机动情况下Singer 模型算法、当前统计模型算法和IMM算法在x轴和y轴上的位置均方根误差均逐渐收敛,且相应的收敛值均小于雷达的测距误差,这说明上述三种算法可实现对一般机动目标的跟踪。对x轴和y轴上的位置均方根误差进行比较可知,Singer模型算法高 于当前统计模型算法。这是因为当前统计模型算法是对Singer模型算法的一种改进,当前统计模型算法根据机动加速度均值实时调整过程噪声协方差,从而可以自适应跟踪机动目标。而Singer模型算法是利用先验模型去描述目标的机动运动。因此在一般机动情况下,当前统计模型算法的跟踪精度较Singer模型算法的高。而在低机动情况 下,当前统计模型算法对Singer模型算法的改进程度不高,因此这两种算法的跟踪精 度十分接近,但当前统计模型算法的跟踪精度略高于Singer模型算法。IMM算法在 x轴和y轴上的位置均方根误差仍较另外两种算法的小,这依然是模型集中包含目标 运动模型的结果。综合前面的分析可知,在一般机动情况下,按照跟踪精度从高往低进行排列,这三种算法依次为IMM算法、当前统计模型算法、Singer模型算法。
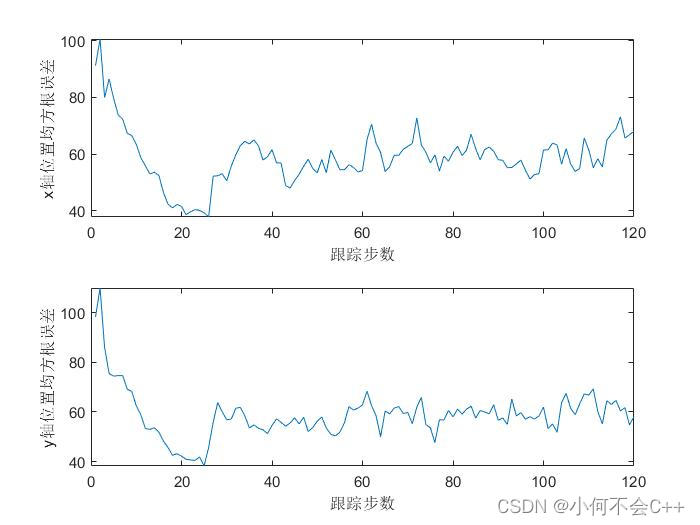
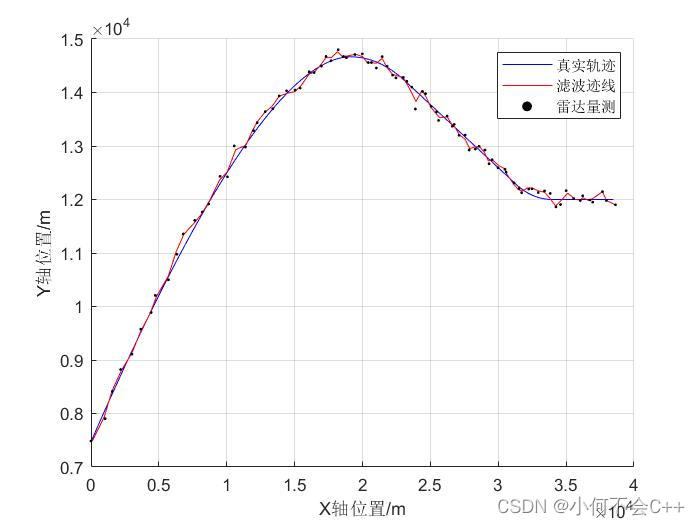
三、高机动情况
假设目标起始状态为
X
(
0
)
=
[
38480
m
,
−
426
m
/
s
,
12000
m
,
0
m
/
s
]
T
X(0)=[38480m,-426m/s,12000m,0m/s]^T
X ( 0 ) = [ 38480 m , − 426 m / s , 12000 m , 0 m / s ] T
85
s
85s
85 s
T
=
1
s
T=1s
T = 1 s
100
m
100m
100 m
目标发生机动时刻
t
=
11
t=11
t = 11
t
=
18
t=18
t = 18
t
=
41
t=41
t = 41
t
=
51
t=51
t = 51
t
=
71
t=71
t = 71
x
x
x
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) 10 0 -5 -10 40
y
y
y
(
m
/
s
2
)
(m/s^2)
( m / s 2 ) 12 0 -8 -13 18
3.1 Singer模型参数设置
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
σ
m
2
=
10133
\sigma^2_m=10133
σ m 2 = 10133
3.2 当前统计模型算法参数设置
机动频率
α
=
1
/
20
\alpha=1/20
α = 1/20
a
m
a
x
=
80
m
/
s
2
a_{max}=80m/s^2
a ma x = 80 m / s 2
3.3 交互多模型算法
采用三个模型,模型的过程噪声方差
q
q
q
P
=
[
0.8
0.15
0.05
0.3
0.4
0.3
0.05
0.15
0.8
]
P=\begin{bmatrix} 0.8 & 0.15 &0.05\\ 0.3 & 0.4&0.3\\0.05&0.15&0.8 \end{bmatrix}
P =
0.8 0.3 0.05 0.15 0.4 0.15 0.05 0.3 0.8
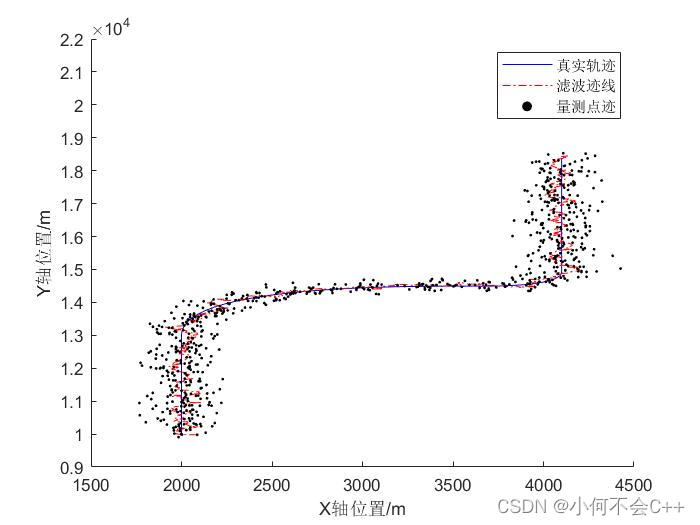
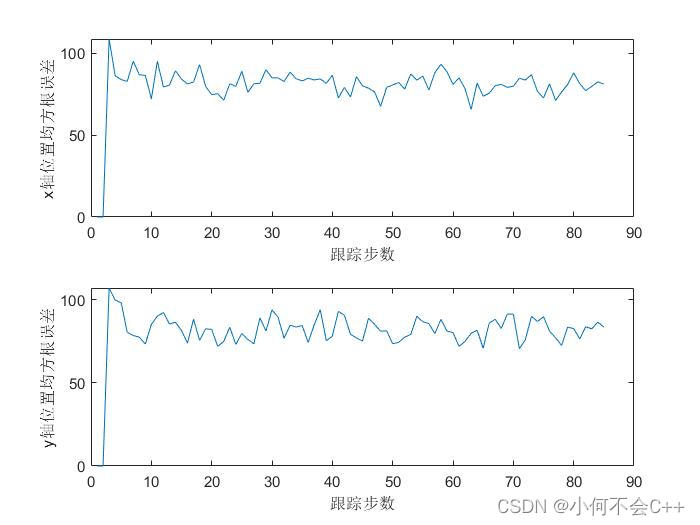
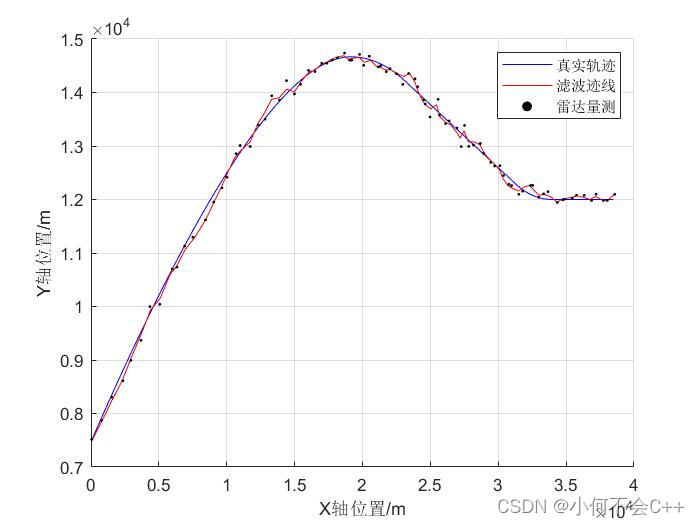
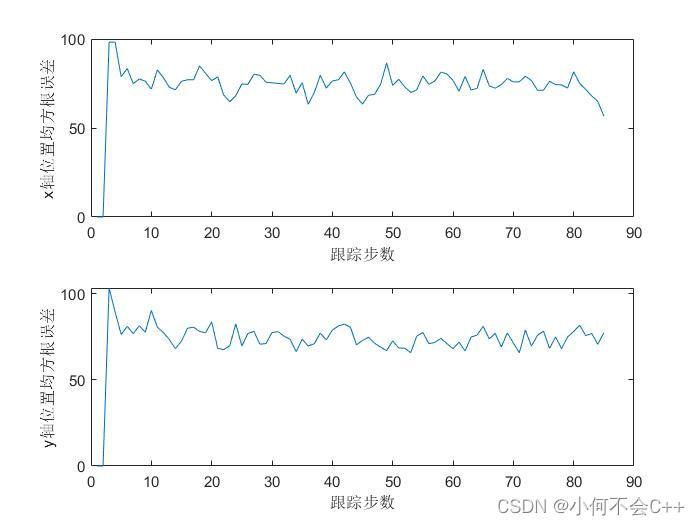
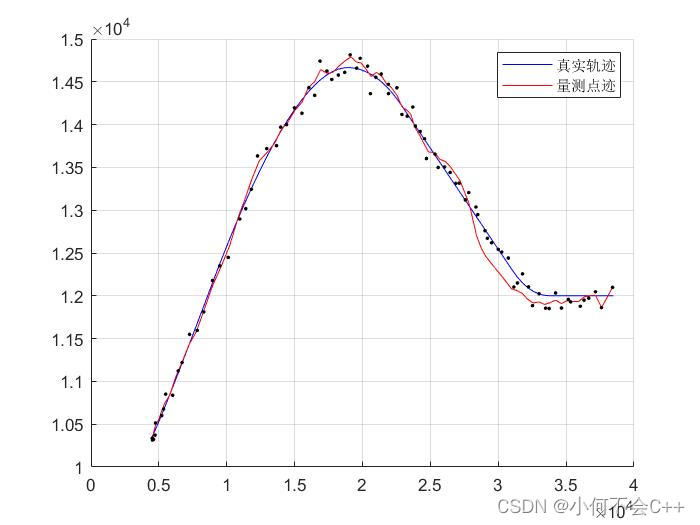
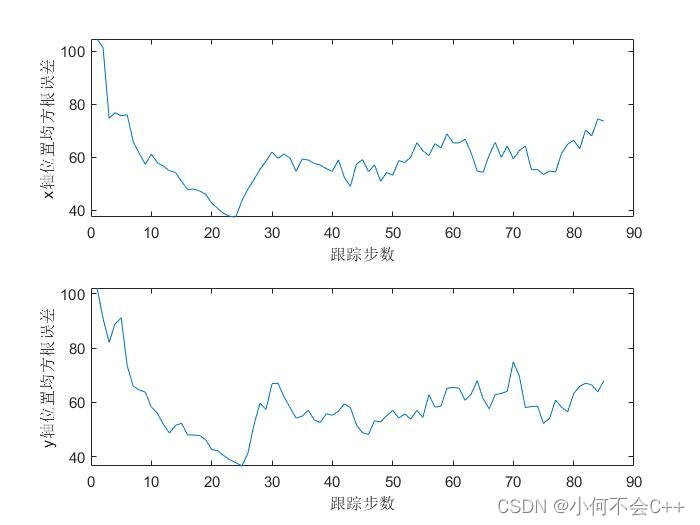
3.4 对比分析
随着跟踪步数的增加,在高机动情况下Singer模 型算法、当前统计模型算法和IMM算法在x轴和y轴上的位置均方根误差均逐渐收敛,且相应的收敛值均小于雷达的测距误差,这说明上述三种算法可实现对高机动目标的跟踪。
−
10
m
/
s
2
-10 m/s^2
− 10 m / s 2
40
m
/
s
2
40m/s^2
40 m / s 2
50
m
/
s
2
50 m/s^2
50 m / s 2
31
m
/
s
2
31 m/s^2
31 m / s 2
function [ x_est, p_est, xn_est, pn_est, u] = imm ( xn_est, pn_est, T, Z, Delta, u)
p= [ 0.8 0.15 0.05 ;
0.3 0.4 0.3 ;
0.05 0.15 0.8 ] ;
phi{ 1 , 1 } = [ 1 T 0 0 ;
0 1 0 0 ;
0 0 1 T;
0 0 0 1 ] ;
phi{ 1 , 1 } ( 6 , 6 ) = 0 ;
phi{ 2 , 1 } = [ 1 T 0 0 T^ 2 / 2 0 ;
0 1 0 0 T 0 ;
0 0 1 T 0 T^ 2 / 2 ;
0 0 0 1 0 T;
0 0 0 0 1 0 ;
0 0 0 0 0 1 ] ;
phi{ 3 , 1 } = phi{ 2 , 1 } ;
g{ 1 , 1 } = [ T/ 2 , 0 ;
1 , 0 ;
0 T/ 2 ;
0 1 ] ;
g{ 1 , 1 } ( 6 , 2 ) = 0 ;
g{ 2 , 1 } = [ T^ 2 / 4 , 0 ;
T/ 2 , 0 ;
0 , T^ 2 / 4 ;
0 T/ 2 ;
1 0 ;
0 1 ] ;
g{ 3 , 1 } = g{ 2 , 1 } ;
q{ 1 , 1 } = 0.01 * eye ( 2 ) ;
q{ 2 , 1 } = 10 * eye ( 2 ) ;
q{ 3 , 1 } = 10 * eye ( 2 ) ;
H = [ 1 0 0 0 0 0 ;
0 0 1 0 0 0 ] ;
R = eye ( 2 ) * Delta^ 2 ;
mu= zeros ( 3 , 3 ) ;
c_mean = zeros ( 1 , 3 ) ;
for i = 1 : 3
c_mean= c_mean+ p ( i , : ) * u ( i ) ;
end
for i = 1 : 3
mu ( i , : ) = p ( i , : ) * u ( i ) ./ c_mean;
end
想要全部代码可以直接加我Q 2647782128 记得备注
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)