借助FileZilla实现Windows和 Ubuntu间文件互传,需要使用 FTP服务,设置方法如下:
1、Windows下安装FTP客户端—FileZilla(该软件免费,可以直接在官网下载)。
官网地址:客户端 - FileZilla中文网。
2、Ubuntu下开启FTP服务。
①:打开终端,安装FTP服务。
sudo apt-get install vsftpd
②:终端下使用VI命令打开 /etc/vsftpd.conf。
sudo vi /etc/vsftpd.conf
③:在vsftpd.conf文件中找到如下两行,去掉注释后保存退出。

④:执行完上述操作后,在终端输入以下代码,重启FTP服务。
sudo /etc/init.d/vsftpd restart
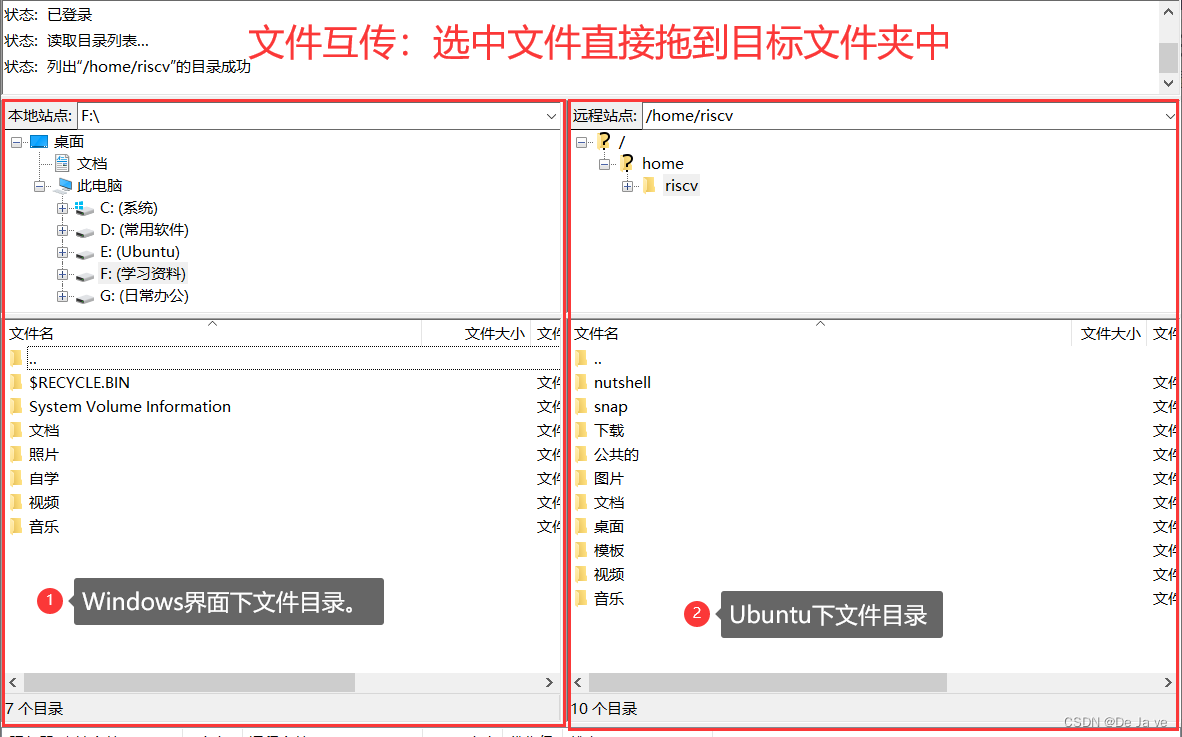
3、Ubuntu和 Windows文件互传
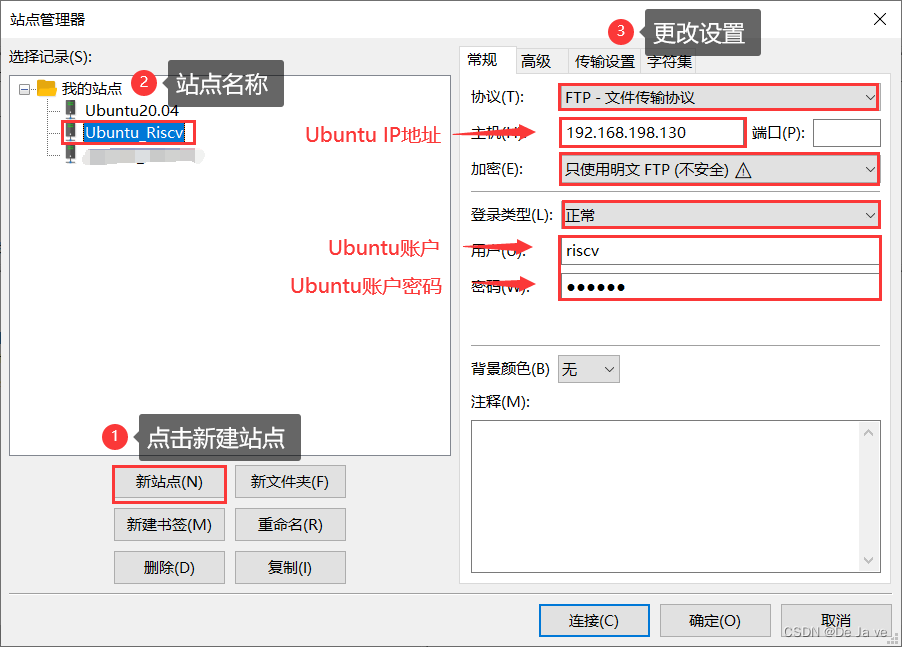
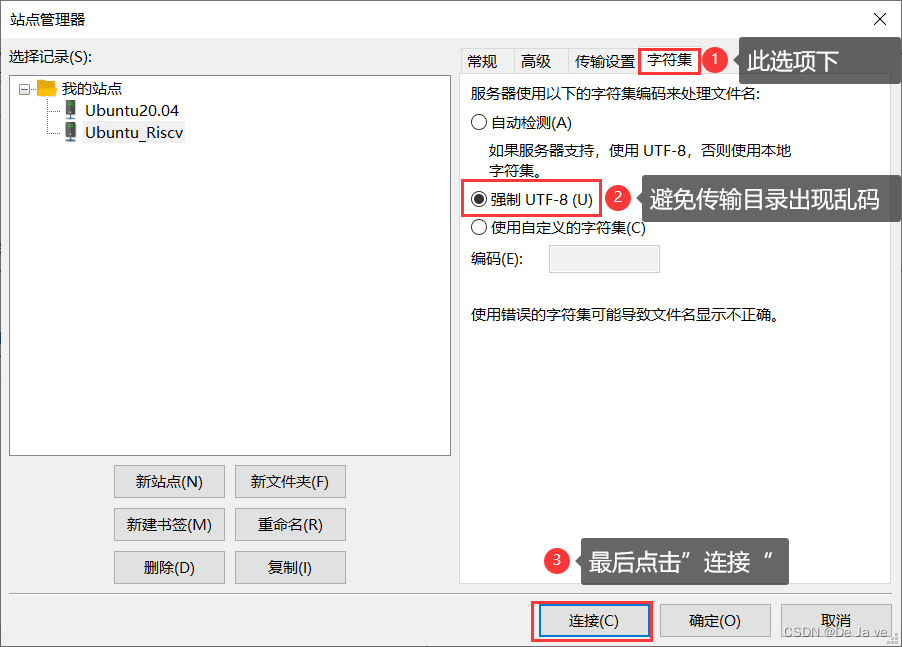
①:打开FileZilla,点击窗口右上角 “文件—站点管理器” 进入以下界面。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)