ROS TF介绍
一、TF是什么?
1.TF是ROS的一个包(package)
2.TF能让用户随时记录各种坐标系之间的变换关系
3.TF能让用户在一个坐标系中进行坐标运算,并将转换关系后的位置关系传到另一个坐标系
在ROS里面查看tf变换关系
rosrun rqt_tf_tree rqt_tf_tree

图中为某一时刻的tf变换图(先要启动一个机器人模型),表示turtle1和turtle2与world之间的关系
也能通过rviz查看,但看上去不太清晰
rosrun rviz rviz
打开rviz后,点击右下方的Add,加入TF
rosrun tf view_frames
会产生一个pdf文件,打开后会有所有的tf变换结果
4.
针对某一个topic查看tf变换关系
rostopic echo /tf -turtle1
二、TF变换怎么使用
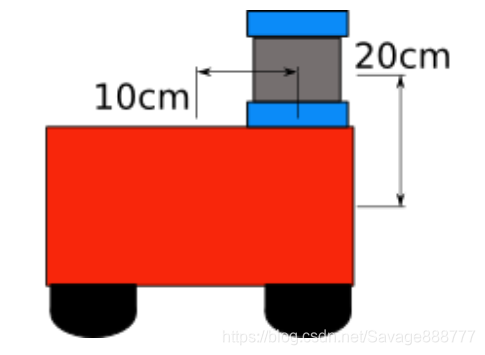
以官网的TF变换为例作一部分介绍,图中需要变换的有两方面,一个是机器人本体(base_link)与激光雷达(base_laser)的TF变换,另一个是激光雷达产生的激光点变换到base_link坐标系下(原来产生的激光点不会因为雷达位置变换而同步移动到相应位置,因此需要修改)。
注:红色的为base_link,蓝色的为base_laser
1.base_link与base_laser之间的变换
(原理描述)
如果以base_link作为基准,那么base_laser相对于base_link的水平方向的距离为0.1m,竖直方向的距离为0.2m.因此,从base_laser到base_link的坐标转换关系应该为(x:0.1m,y:0.0m, z:0.2m),相反的转换即是(x:-0.1m,y:0.0m,z:0.2m)。问题来了,如果每一个元件都按这样的方式去转换,当项目庞大,组件繁多的时候,就会应付不过来,因此TF为我们提供了更好的机制。
利用tf来管理这种关系,我们需要把他们添加到转换树(transform tree)中。一方面来说,转换树中的每一个节点都对应着一类坐标系,节点之间的连线即是两个坐标相互转换的一种表示,一种从当前节点到子节点的转换表示。Tf利用树结构的方式,保证了两个坐标系之间的只存在单一的转换,同时假设节点之间的连线指向是从parent到child。
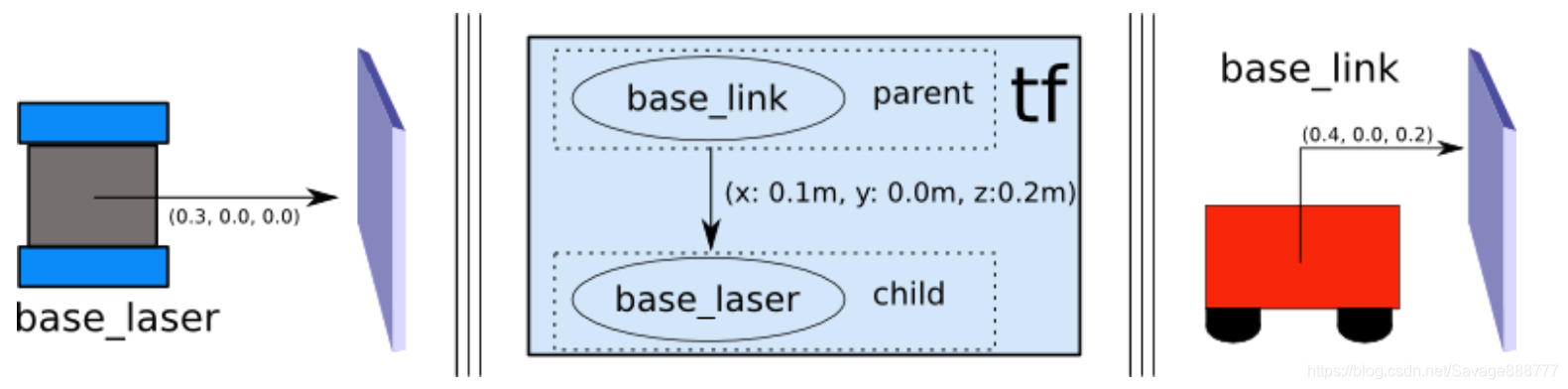
基于我们简单的例子,我们需要创建两个节点,一个“base_link”,一个是“base_laser”。为了定义两者的关系,首先,我们需要决定谁是parent,谁是child。时刻记得,由于tf假设所有的转换都是从parent到child的,因此谁是parent是有差别的。我们选择“base_link”坐标系作为parent,其他的传感器等,都是作为“器件”被添加进robot的,对于“base_link”和“base_laser”他们来说,是最适合的。这就意味着转换关系的表达式应该是(x:0.1m,y0.0m,z:0.2m)。关系的建立,在收到“base_laser”的数据到“base_link”的转换过程,就可以是简单的调用tf库即可完成。我们的机器人,就可以利用这些信息,在“base_link”坐标系中,就可以推理出传感器扫描出的数据,并可安全的规划路径和避障等工作。
(具体实现)
先创建一个用于转换的package,并添加依赖(包名为robot_setup_tf,依赖roscpp,tf,geometry_msgs)
cd %TOP_DIR_YOUR_CATKIN_WS%/src
catkin_create_pkg robot_setup_tf roscpp tf geometry_msgs
我们已经创建了package。接着我们需要创建对应的节点,来实现广播任务base_laser->base_link。在robot_setup_tf包中,src目录下面新建一个tf_broadcaster.cpp文件,然后将下面代码贴进去。
cd robot_setup_tf/src
touch tf_broadcaster.cpp
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>//包含tf下面的广播tf变换头文件
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_publisher");//初始化robot_tf_publisher节点
ros::NodeHandle n; //在robot_tf_publisher节点下面新建一个节点控制器n
ros::Rate r(100); //设置节点控制器n的发布频率为100
tf::TransformBroadcaster broadcaster; //创建tf变换的一个对象(tf类下面的广播的对象,如果不懂,加强c++学习)
while(n.ok()){ //循环判断节点控制器是否计满100,若是则执行
broadcaster.sendTransform( //tf创建的对象发布消息
tf::StampedTransform(
tf::Transform(tf::Quaternion(0, 0, 0, 1), tf::Vector3(0.1, 0.0, 0.2)),
ros::Time::now(),"base_link", "base_laser"));
//发布的消息有5个元素,
//第一个元素tf::Quaternion为旋转变换,就是说base_laser在转换到base_link的时候
//是否需要进行一定的旋转,
//第二个元素,tf::Vector3为x,y,z三轴的位移变换,
//第三个元素为变换的时间(因为变换是根据一定时间执行一次),
//第四个元素为转换的基准目标,也就是转换后到这个坐标系,
//第五个元素为待转换的坐标系
n.sleep();//没有操作的时候,节点控制器休眠
}
}
2.base_laser的激光点到base_link的变换
在robot_setup_tf功能包中,在src目录下创建tf_listener.cpp,并将下面的代码粘贴到里面:
特别提醒:一个TransformListener对象会自动的订阅ROS系统中的变换消息主题,同时管理所有的该通道上的变换数据。也就是说不需要自己手动添加tf的订阅关系
cd robot_setup_tf/src
touch tf_listener.cpp
#include <ros/ros.h>
#include <geometry_msgs/PointStamped.h>
#include <tf/transform_listener.h> //添加tf订阅的头文件
void transformPoint(const tf::TransformListener& listener){
//创建一个函数,参数为TransformListener,作用为将“base_laser”坐标系的点,变换到“base_link”坐标系中。
geometry_msgs::PointStamped laser_point;
laser_point.header.frame_id = "base_laser";
//we'll just use the most recent transform available for our simple example
laser_point.header.stamp = ros::Time();
//消息名字最后的“Stamped”的意义是,它包含了一个头部,
//允许我们去把时间戳和消息的frame_id相关关联起来。
//我们将会设置laser_point的时间戳为ros::time(),
//即是允许我们请求TransformListener取得最新的变换数据。
//创建的点为虚拟点
laser_point.point.x = 1.0;
laser_point.point.y = 0.2;
laser_point.point.z = 0.0;
try{
geometry_msgs::PointStamped base_point;
listener.transformPoint("base_link", laser_point, base_point);
//我们已经有了从“base_laser”到“base_link”变换的点数据。进一步,我们通过TransformListener对象,调用transformPoint(),填充三个参数来进行数据变换。第1个参数,代表我们想要变换的目标坐标系的名字。第2个参数填充需要变换的原始坐标系的点对象,第3个参数填充,目标坐标系的点对象。所以,在函数调用后,base_point里存储的信息就是变换后的点坐标。
ROS_INFO("base_laser: (%.2f, %.2f. %.2f) -----> base_link: (%.2f, %.2f, %.2f) at time %.2f",
laser_point.point.x, laser_point.point.y, laser_point.point.z,
base_point.point.x, base_point.point.y, base_point.point.z,
base_point.header.stamp.toSec());
}
catch(tf::TransformException& ex){
ROS_ERROR("Received an exception trying to transform a point from \"base_laser\" to \"base_link\": %s", ex.what());
}
}
int main(int argc, char** argv){
ros::init(argc, argv, "robot_tf_listener");
ros::NodeHandle n;
tf::TransformListener listener(ros::Duration(10));
//we'll transform a point once every second
ros::Timer timer = n.createTimer(ros::Duration(1.0), boost::bind(&transformPoint, boost::ref(listener)));
ros::spin();
}
3.修改CMakeList.txt
add_executable(tf_broadcaster src/tf_broadcaster.cpp)
add_executable(tf_listener src/tf_listener.cpp)
target_link_libraries(tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(tf_listener ${catkin_LIBRARIES})
4.编译通过
$ cd %TOP_DIR_YOUR_CATKIN_WS%
$ catkin_make
5.运行代码
roslaunch robot_setup_tf tf_broadcaster
rosrun robot_setup_tf tf_listener
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)