文章目录
- 前言
- 一、MDK下载算法原理
- 1. 程序能够通过下载算法下载到芯片的原理
- 2. 算法程序中操作执行流程
- 3. 创建MDK下载算法通用流程
- 二、树莓派pico下载算法制作步骤
- 1.下载树莓派的MDK的程序模板
- 2.修改输出算法文件的名字
- 3.修改编程算法文件FlashPrg.c
- 4 .修改配置文件FlashDev.c
- 5 .保证生成的算法文件中RO和RW段的独立性,即与地址无关
- 6.将程序可执行文件axf修改为flm格式
- 7.添加分散加载文件
前言
由裸机思维公众号博主开发的专为树莓派Pico提供MDK开发体验的 Pico-Template,为广大单片机爱好者重新拉回了MDK开发的舒适区。
但是,正如博主文章中提到的美中不足之处,需要纯手工下载程序,所以就有了这么一个制作flash下载算法的机会,来实现flash的自动下载功能。
一、MDK下载算法原理
1. 程序能够通过下载算法下载到芯片的原理
通过MDK创建一批与地址信息无关的函数,实现的功能主要有初始化,擦除,编程,读取,校验等,然后MDK调试下载阶段,会将算法文件加载到芯片的内部RAM里面(加载地址可以通过MDK设置),然后MDK通过与这个算法文件的交互,实现程序下载,调试阶段数据读取等操作。
2. 算法程序中操作执行流程
擦除操作大致流程:
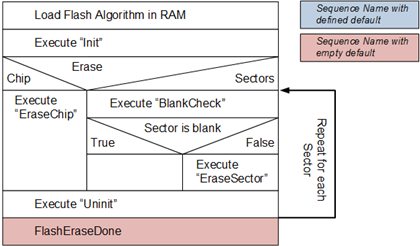
- 加载算法到芯片RAM。
- 执行初始化函数Init。
- 执行擦除操作,根据用户的MDK配置,这里可以选择整个芯片擦除或者扇区擦除。
- 执行Uinit函数。
- 操作完毕。
编程操作大致流程:
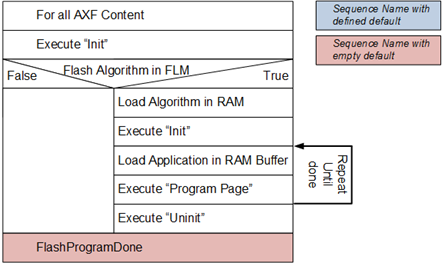
- 针对MDK生成的axf可执行文件做Init初始化,这个axf文件是指的大家自己创建应用程序生成的。
- 查看Flash算法是否在FLM文件。如果没有在,操作失败。如果在:
- 加载算法到RAM。
- 执行Init函数。
- 加载用户到RAM缓冲。
- 执行Program Page页编程函数。
- 执行Uninit函数。
- 操作完毕。
校验操作大致流程:
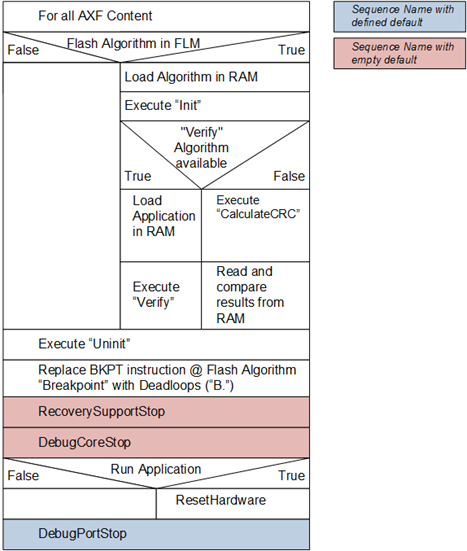
- 校验要用到MDK生成的axf可执行文件。校验就是axf文件中下载到芯片的程序和实际下 载的程序读出来做比较。
- 查看Flash算法是否在FLM文件。如果没有在,操作失败。如果在:
- 加载算法到RAM。
- 执行Init函数。
- 查看校验算法是否存在
- 如果有,加载应用程序到RAM并执行校验。
- 如果没有,计算CRC,将芯片中读取出来的数据和RAM中加载应用计算输出的CRC值做比较。
- 执行Uninit函数。
- 替换BKPT(BreakPoint断点指令)为 B. 死循环指令。
- 执行RecoverySupportStop,恢复支持停止。
- 执行DebugCoreStop,调试内核停止。
- 运行应用:
- 操作完毕,停止调试端口。
3. 创建MDK下载算法通用流程
- 将ARM:CMSIS Pack文件夹(通常是C:\Keil\ARM\Pack\ARM\CMSIS\ version \Device_Template_Flash)中的工程复制到一个新文件夹中,取消文件夹的只读属性,重命名项目文件NewDevice.uvprojx以表示新的flash 设备名称,例如MyDevice.uvprojx。
- 打开工程,从工具栏中,使用下拉选择目标来选择处理器架构。
- 打开对话框Project - Options for Target - Output并更改Name of Executable字段的内容以表示设备,例如MyDevice。
- 调整文件FlashPrg中的编程算法。
- 调整文件FlashDev中的设备参数。
- 使用Project - Build Target生成新的 Flash 编程算法。
二、树莓派pico下载算法制作步骤
1.下载树莓派的MDK的程序模板
mkdir pico-mdk
cd pico-mdk
git clone https:
git submodule update --init
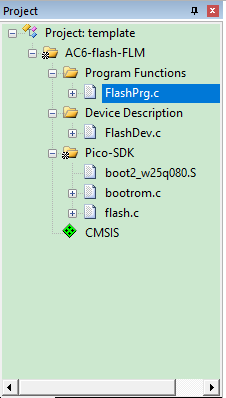
从:CMSIS Pack文件夹(通常是C:\Keil\ARM\Pack\ARM\CMSIS\ version \Device_Template_Flash)中的工程复制出FlashDev.c、FlashOS.h、FlashPrg.c三个文件到工程目录中。
修改工程文件如下,只保留如下几个文件:
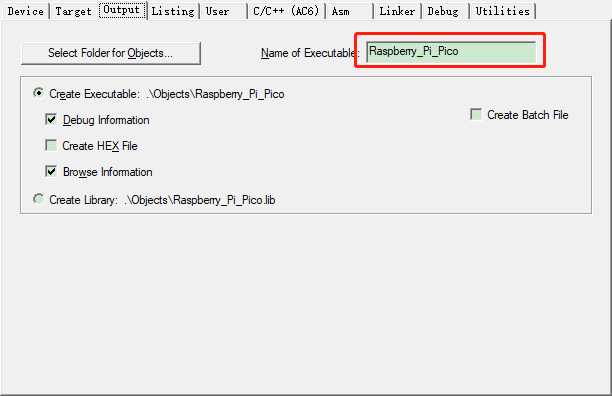
2.修改输出算法文件的名字
这个名字是方便用户查看的,由于本次制作的下载算法是针对树莓派pico这款开发板的,所以名字就叫做Raspberry_Pi_Pico
3.修改编程算法文件FlashPrg.c
#include "FlashOS.H"
#include "hardware/flash.h"
#include "hardware/resets.h"
#include "hardware/structs/sio.h"
#include "hardware/regs/tbman.h"
#define BOOT2_SIZE_BYTES 256
unsigned long base_adr = 0x10000000;
bool running_on_fpga() {
return !!((*(io_ro_32 *)TBMAN_BASE) & TBMAN_PLATFORM_FPGA_BITS);
}
#ifdef FLASH_MEM
__attribute__((used))
int Init (unsigned long adr, unsigned long clk, unsigned long fnc) {
uint32_t count = 1000;
reset_block(~(
RESETS_RESET_IO_QSPI_BITS |
RESETS_RESET_PADS_QSPI_BITS |
RESETS_RESET_PLL_USB_BITS |
RESETS_RESET_USBCTRL_BITS |
RESETS_RESET_SYSCFG_BITS |
RESETS_RESET_PLL_SYS_BITS |
RESETS_RESET_TIMER_BITS
));
if (running_on_fpga()) {
*(io_rw_32 *) (IO_QSPI_BASE + 0xc) = 5;
sio_hw->gpio_hi_out = 1u << 1;
sio_hw->gpio_hi_oe = 1u << 1;
sio_hw->gpio_hi_oe = 0;
}
while(count--);
uint32_t sum = 0;
for (int i = 0; i < 9; ++i) {
count = 100;
while(count--);
sum += (sio_hw->gpio_hi_in >> 1) & 1u;
}
return (0);
}
#endif
#ifdef FLASH_MEM
__attribute__((used))
int UnInit (unsigned long fnc) {
return (0);
}
#endif
#ifdef FLASH_MEM
__attribute__((used))
int EraseChip (void) {
flash_range_erase(0,0x00200000);
return (0);
}
#endif
#ifdef FLASH_MEM
__attribute__((used))
int EraseSector (unsigned long adr) {
flash_range_erase(adr - base_adr,4096);
return (0);
}
#endif
#ifdef FLASH_MEM
static const uint32_t crc32_table_0x04c11db7[] = {
0x00000000, 0x04c11db7, 0x09823b6e, 0x0d4326d9,
0x130476dc, 0x17c56b6b, 0x1a864db2, 0x1e475005,
0x2608edb8, 0x22c9f00f, 0x2f8ad6d6, 0x2b4bcb61,
0x350c9b64, 0x31cd86d3, 0x3c8ea00a, 0x384fbdbd,
0x4c11db70, 0x48d0c6c7, 0x4593e01e, 0x4152fda9,
0x5f15adac, 0x5bd4b01b, 0x569796c2, 0x52568b75,
0x6a1936c8, 0x6ed82b7f, 0x639b0da6, 0x675a1011,
0x791d4014, 0x7ddc5da3, 0x709f7b7a, 0x745e66cd,
0x9823b6e0, 0x9ce2ab57, 0x91a18d8e, 0x95609039,
0x8b27c03c, 0x8fe6dd8b, 0x82a5fb52, 0x8664e6e5,
0xbe2b5b58, 0xbaea46ef, 0xb7a96036, 0xb3687d81,
0xad2f2d84, 0xa9ee3033, 0xa4ad16ea, 0xa06c0b5d,
0xd4326d90, 0xd0f37027, 0xddb056fe, 0xd9714b49,
0xc7361b4c, 0xc3f706fb, 0xceb42022, 0xca753d95,
0xf23a8028, 0xf6fb9d9f, 0xfbb8bb46, 0xff79a6f1,
0xe13ef6f4, 0xe5ffeb43, 0xe8bccd9a, 0xec7dd02d,
0x34867077, 0x30476dc0, 0x3d044b19, 0x39c556ae,
0x278206ab, 0x23431b1c, 0x2e003dc5, 0x2ac12072,
0x128e9dcf, 0x164f8078, 0x1b0ca6a1, 0x1fcdbb16,
0x018aeb13, 0x054bf6a4, 0x0808d07d, 0x0cc9cdca,
0x7897ab07, 0x7c56b6b0, 0x71159069, 0x75d48dde,
0x6b93dddb, 0x6f52c06c, 0x6211e6b5, 0x66d0fb02,
0x5e9f46bf, 0x5a5e5b08, 0x571d7dd1, 0x53dc6066,
0x4d9b3063, 0x495a2dd4, 0x44190b0d, 0x40d816ba,
0xaca5c697, 0xa864db20, 0xa527fdf9, 0xa1e6e04e,
0xbfa1b04b, 0xbb60adfc, 0xb6238b25, 0xb2e29692,
0x8aad2b2f, 0x8e6c3698, 0x832f1041, 0x87ee0df6,
0x99a95df3, 0x9d684044, 0x902b669d, 0x94ea7b2a,
0xe0b41de7, 0xe4750050, 0xe9362689, 0xedf73b3e,
0xf3b06b3b, 0xf771768c, 0xfa325055, 0xfef34de2,
0xc6bcf05f, 0xc27dede8, 0xcf3ecb31, 0xcbffd686,
0xd5b88683, 0xd1799b34, 0xdc3abded, 0xd8fba05a,
0x690ce0ee, 0x6dcdfd59, 0x608edb80, 0x644fc637,
0x7a089632, 0x7ec98b85, 0x738aad5c, 0x774bb0eb,
0x4f040d56, 0x4bc510e1, 0x46863638, 0x42472b8f,
0x5c007b8a, 0x58c1663d, 0x558240e4, 0x51435d53,
0x251d3b9e, 0x21dc2629, 0x2c9f00f0, 0x285e1d47,
0x36194d42, 0x32d850f5, 0x3f9b762c, 0x3b5a6b9b,
0x0315d626, 0x07d4cb91, 0x0a97ed48, 0x0e56f0ff,
0x1011a0fa, 0x14d0bd4d, 0x19939b94, 0x1d528623,
0xf12f560e, 0xf5ee4bb9, 0xf8ad6d60, 0xfc6c70d7,
0xe22b20d2, 0xe6ea3d65, 0xeba91bbc, 0xef68060b,
0xd727bbb6, 0xd3e6a601, 0xdea580d8, 0xda649d6f,
0xc423cd6a, 0xc0e2d0dd, 0xcda1f604, 0xc960ebb3,
0xbd3e8d7e, 0xb9ff90c9, 0xb4bcb610, 0xb07daba7,
0xae3afba2, 0xaafbe615, 0xa7b8c0cc, 0xa379dd7b,
0x9b3660c6, 0x9ff77d71, 0x92b45ba8, 0x9675461f,
0x8832161a, 0x8cf30bad, 0x81b02d74, 0x857130c3,
0x5d8a9099, 0x594b8d2e, 0x5408abf7, 0x50c9b640,
0x4e8ee645, 0x4a4ffbf2, 0x470cdd2b, 0x43cdc09c,
0x7b827d21, 0x7f436096, 0x7200464f, 0x76c15bf8,
0x68860bfd, 0x6c47164a, 0x61043093, 0x65c52d24,
0x119b4be9, 0x155a565e, 0x18197087, 0x1cd86d30,
0x029f3d35, 0x065e2082, 0x0b1d065b, 0x0fdc1bec,
0x3793a651, 0x3352bbe6, 0x3e119d3f, 0x3ad08088,
0x2497d08d, 0x2056cd3a, 0x2d15ebe3, 0x29d4f654,
0xc5a92679, 0xc1683bce, 0xcc2b1d17, 0xc8ea00a0,
0xd6ad50a5, 0xd26c4d12, 0xdf2f6bcb, 0xdbee767c,
0xe3a1cbc1, 0xe760d676, 0xea23f0af, 0xeee2ed18,
0xf0a5bd1d, 0xf464a0aa, 0xf9278673, 0xfde69bc4,
0x89b8fd09, 0x8d79e0be, 0x803ac667, 0x84fbdbd0,
0x9abc8bd5, 0x9e7d9662, 0x933eb0bb, 0x97ffad0c,
0xafb010b1, 0xab710d06, 0xa6322bdf, 0xa2f33668,
0xbcb4666d, 0xb8757bda, 0xb5365d03, 0xb1f740b4
};
static uint32_t crc32_calculator (uint8_t *pbuf, uint_fast32_t size, uint32_t init)
{
uint32_t crc_result = init;
assert(NULL != pbuf);
assert(size > 0);
do {
crc_result = (crc_result << 8) ^
crc32_table_0x04c11db7[((crc_result >> 24) ^ (*pbuf)) & 0xFF];
pbuf++;
} while(--size);
return crc_result;
}
#endif
#ifdef FLASH_MEM
__attribute__((used))
int ProgramPage (unsigned long adr, unsigned long sz, unsigned char *buf) {
if(adr == base_adr){
uint32_t crc = crc32_calculator(buf, BOOT2_SIZE_BYTES - 4, 0xFFFFFFFF);
(*(uint32_t *)&(buf[BOOT2_SIZE_BYTES - 4])) = crc;
}
flash_range_program(adr - base_adr,buf,sz);
return (0);
}
#endif
#ifdef FLASH_MEM
__attribute__((used))
unsigned long Verify (unsigned long adr, unsigned long sz, unsigned char *buf){
if (0 == sz) {
return adr;
}
if(adr == base_adr){
do {
if ( *(char*)adr++ != *((char*)buf++)){
if((adr - base_adr) == (256)){
continue;
}
if((adr - base_adr) == (255)){
continue;
}
if((adr - base_adr) == (254)){
continue;
}
if((adr - base_adr) == (253)){
continue;
}
return (adr-1);
}
} while(--sz);
return adr;
}
do {
if ( *(char*)adr != *((char*)buf++))
return (adr);
adr++;
} while(--sz);
return adr;
}
#endif
注:
- RP2040的内部ROM固化了一段pico-bootrom代码,里边包含了对外部qspi flash的驱动,通过pico_sdk提供的flash.c接口,可以对flash进行擦写。
- 注意到ProgramPage 函数中通过CRC算法对(256-4)处的地址替换了CRC校验后的值。这是因为stage 2 boot的入口是一个固定的256字节,RP2040启动过程中, boot会校验此处的数据,详情请查看pico-bootrom代码。
4 .修改配置文件FlashDev.c
#include "FlashOS.H"
__attribute__((used))
struct FlashDevice const FlashDevice = {
FLASH_DRV_VERS,
"Raspberry Pi Pico Flash",
ONCHIP,
0x10000000,
0x00200000,
0x1000,
0,
0xFF,
100,
500,
0x1000, 0x000000,
SECTOR_END
};
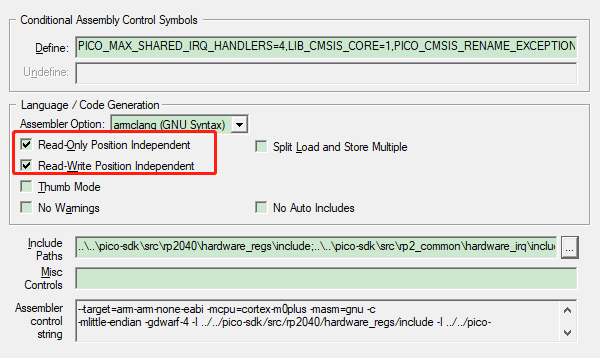
5 .保证生成的算法文件中RO和RW段的独立性,即与地址无关
C和汇编的配置都勾选上:
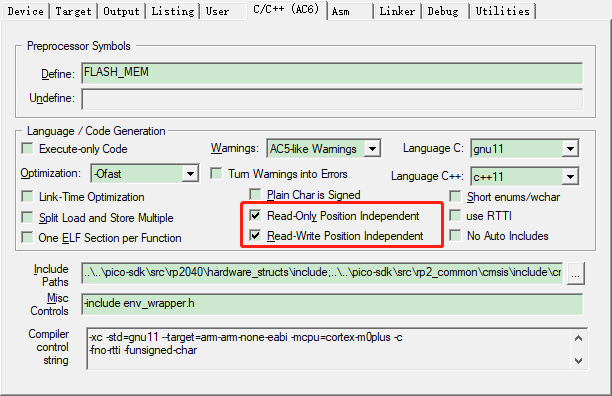
ROPI地址无关实现
如果程序的所有只读段都与位置无关,则该程序为只读位置无关(ROPI, Read-only position independence)。ROPI段通常是位置无关代码(PIC,position-independent code),但可以是只读数据,也可以是PIC和只读数据的组合。选择“ ROPI”选项,可以避免用户不得不将代码加载到内存中的特定位置。这对于以下例程特别有用:
(1)加载以响应运行事件。
(2)在不同情况下使用其他例程的不同组合加载到内存中。
(3)在执行期间映射到不同的地址。
RWPI数据无关实现
使用Read-Write position independence同理,表示的可读可写数据段。
使用RWPI编译代码,解决RW段即全局变量的加载。首先编译的时候会为每一个全局变量生成一个相对于r9寄存器的偏移量,这个偏移量会在.text段中。
在加载elf阶段,将RW段加载到RAM当中之后,需要将r9寄存器指向此片内存的基地址,然后接下来就可以跳转到加载的elf的代码中去执行,就可以实现全局变量的加载了。这也就是利用MDK的FLM文件生成通用flash驱动中提到的需要在编译选项中添加-ffixed-r9的原因。
6.将程序可执行文件axf修改为flm格式

axf2uf2.bat是一个将FLM文件自动部署到MDK安装目录的一个脚本文件。
7.添加分散加载文件
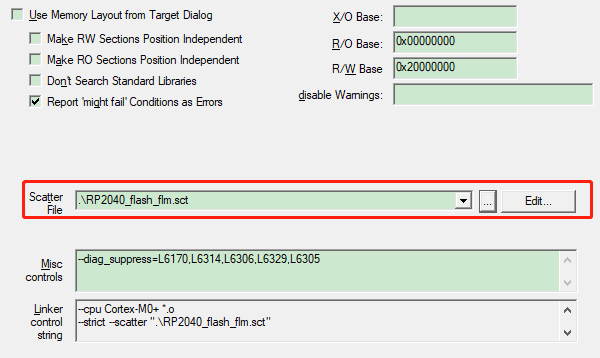
–diag_suppress L6305用于屏蔽没有入口地址的警告信息。
分散加载文件中的内容如下:
; Linker Control File (scatter-loading)
;
PRG 0 PI ; Programming Functions
{
PrgCode +0 ; Code
{
* (+RO)
}
PrgData +0 ; Data
{
* (+RW,+ZI)
}
}
DSCR +0 ; Device Description
{
DevDscr +0
{
FlashDev.o
}
}
最后,奉上此工程的开源链接:https://github.com/Aladdin-Wang/RP2040_Flash_Algorithm.git
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)