0. 温馨提示
不要尝试vnc虚拟桌面,不要尝试高版本ubuntu镜像,更不要尝试交叉编译。当然做以上这些尝试你确实可以学到更多东西,不止学会怎么用这个板子。
1. 准备所需材料
1.1 opencv3.2 :
https://opencv.org/releases.html
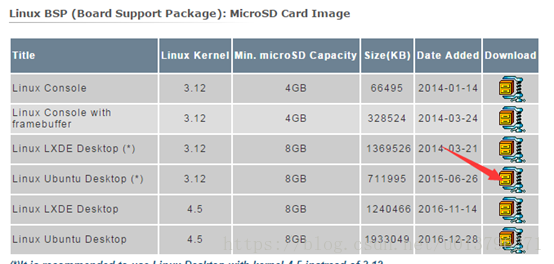
1.2 ubuntu镜像:
http://www.terasic.com.tw/cgi-bin/page/archive.pl?Language=English&CategoryNo=205&No=836&PartNo=4
1.3 win32DiskImger:http://sourceforge.net/projects/win32diskimager/
1.4 8G以上SD卡(带读卡器)一个,de1-soc开发板一块,VGA接口显示器一个,鼠标键盘一套,路由器一个(可选)。
2. 开发板安装ubuntu系统
2.1 将SD卡插入读卡器把下载的ubuntu桌面镜像写进准备的SD卡中。
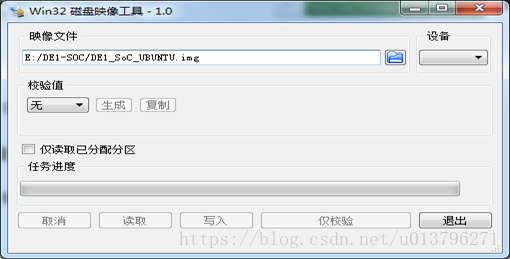
写入成功后插入板卡SD卡槽,开机即可正常显示ubuntu桌面,如遇显示不全可自行调整显示器。注:开发板背面有个sw10开关,此处许设置:MESL[4:0]=00000。
2.2 增加系统内存参考http://blog.csdn.net/wuliangj/article/details/51088632
建议不要忽略此步。系统自动分配内存过小,本人曾在编译过程中内存满导致不得不重新烧写系统。
3. 配置opencv环境
3.1 安装opencv依赖库:
[compiler] sudo apt-get installbuild-essential
[required] sudo apt-get install cmake gitlibgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
[optional] sudo apt-get install python-devpython-numpy libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
3.2 安装opencv
解压opencv源代码
cd ~/opencv
mkdir build
cd build
cmake –D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local/opencv ..
make(此过程耗时较长,或使用make –j4命令并行编译,但考虑开发板资源有限,本人未在开发板使用此命令进行编译)
make install
完成后在/usr/local/opencv中即生成opencv相关库即其他文件。
3.3 配置系统中opencv路径
gedit /etc/ld.so.conf.d/opencv.conf
写入:/usr/local/lib
ldconfig
gedit /etc/bash.bashrc
末尾写入:PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH
source /etc/bash.bashrc
重启即可完成opencv环境配置。
3.4 检验opencv环境
可使用:pkg-config –cflags opencv和pkg-config –libs opencv查看opencv头文件和库文件路径。
编译程序可使用如下命令
arm-linux-gnueabihf-g++ `pkg-config –cflags opencv` -o 输出可执行程序名 源代码文件名`pkg-config –libs opencv`
上面命令中‘`’为1左边按键,cflags和libs前面为两个减号。
生成的可执行文件可正常执行。
4. (可选)向开发板传输文件
第一小节准备的设备中有路由器一个,这个是方便向开发板传输文件的。当然你也可以直接选择使用u盘接到板子USB接口去传输文件,但是我相信每个和我一样使用这个板子的同学都不行局限于用U盘去传文件。所以我们需要一个路由器来和PC组成一个局域网。组成局域网后不但可以使用VNC虚拟桌面,前提是需要开发板使用镜像为gnome类型桌面,如果不是可以自己尝试安装,本人建议还是使用外接显示器的办法,虽然牵扯设备繁多,但是会减免很多不必要的问题。在一个局域网中传输文件有很多种办法,我使用的是scp命令。

若提示端口22主机访问被拒,则需要在开发板安装ssh服务。具体可参考百度文库:https://jingyan.baidu.com/article/9c69d48fb9fd7b13c8024e6b.html
在局域网内使用scp拷贝速度较快。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)