**Ubuntu18.04.5版本根分区扩容**
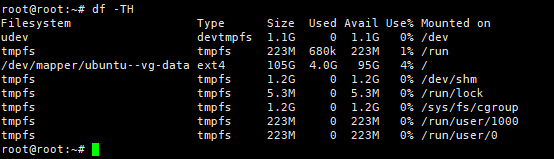
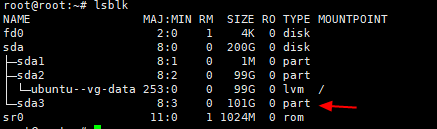
1.给ubuntn操作系统的根分区进行扩容,查看现有根分区大小使用df –TH命令,显示的结果如下: 2.磁盘空间是105G,想扩容到200G,操作步骤如下: 先查看磁盘信息,执行lsblk命令: 显示的是磁盘200G,已分出去99G,还有101G是可以分配的 注意:在对虚拟机扩容时候,由于linux系统没有对其磁盘信息进行 更新,导致了磁盘实际容量和linux系统容量不一致,需要 先执行parted –l命令: 3.进行磁盘分区,执行fdisk /dev/sda: 4.查看分区情况,执行lsblk命令,显示sda3磁盘已分好101G: 5.创建物理卷:pvcreate /dev/sda3 查看创建情况:pvdisplay 6.将物理卷加入到卷组:vgextend ubuntu-vg /dev/sda3 7.将卷组剩余空间添加到逻辑卷/dev/mapper/Ubuntu—vg-data 下: lvextend -l +100%FREE /dev/mapper/ubuntu–vg-data 8.同步到文件系统,对根目录的扩容: resize2fs /dev/mapper/ubuntu–vg-data
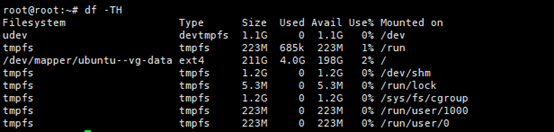
9.查看扩容后磁盘情况:df –TH