以下内容来自从零开始机器人SLAM知识星球 每日更新内容
点击领取学习资料 → 机器人SLAM学习资料大礼包
#论文# Real-Time Visual Inertial Odometry with a Resource-Efficient Harris Corner Detection Accelerator on FPGA Platform
论文地址:IROS2022论文集
视觉惯性里程计(VIO)是机器人领域中被广泛研究的一种定位技术。最新的VIO算法由两部分组成:前端进行视觉感知和惯性测量的预处理,后端融合视觉和惯性测量来估计机器人的姿态。前端的图像处理和后端的传感器融合计算代价都很高,这使得VIO算法,特别是基于优化的VIO算法在有限功率预算的嵌入式平台上实时运行是非常具有挑战性的。本文在算法与硬件协同设计的基础上,提出了一种基于实时优化的单目VIO算法,并在2.6W处理器功耗的嵌入式平台上成功实现。
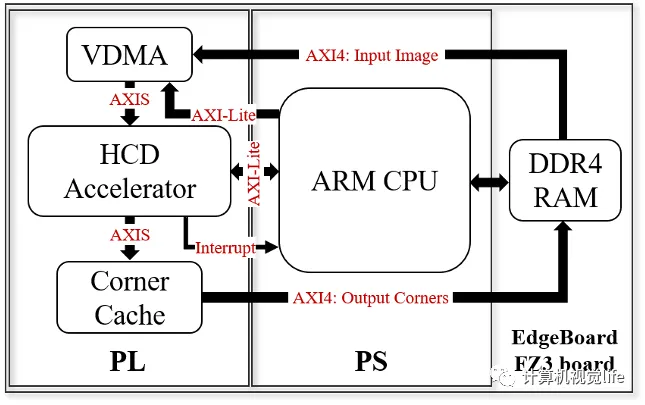
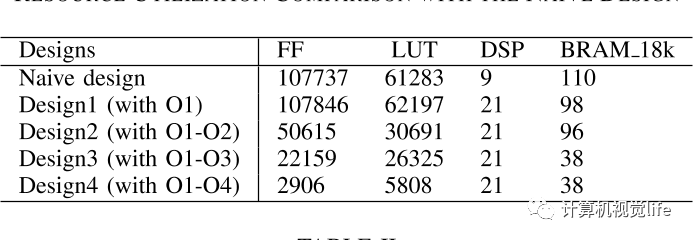
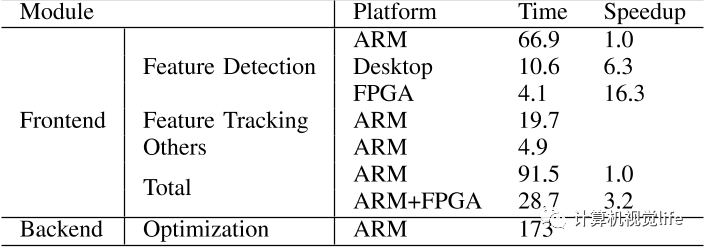
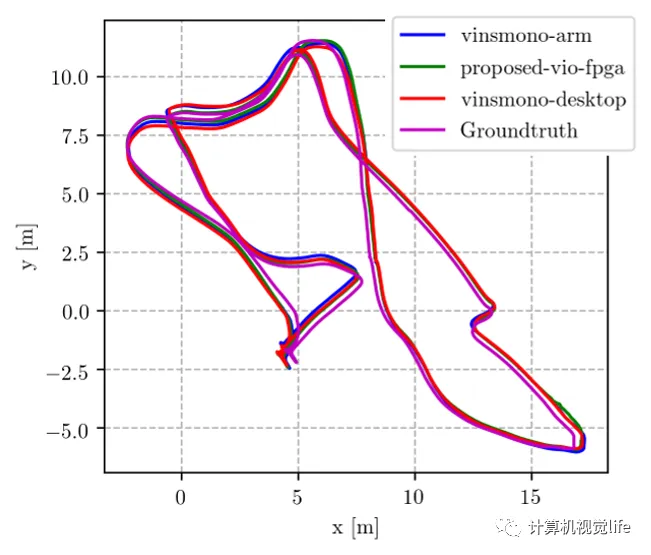
特别是,在FPGA上加速了耗时的Harris角点检测(HCD),与ARM实现相比,处理时间平均减少了16倍。与Xilinx提供的最先进的HCD加速器相比,由于提出了专用的剪枝和并行化技术,在不影响速度的情况下,我们的加速器所需的硬件资源大大减少。最后,在公共数据集上的实验表明,在基于FPGA的平台上提出的实时VIO算法具有与桌面上现有的VIO算法相当的准确率,并且比基于ARM的实现的前端处理速度快3倍。
本文主要贡献如下:
1、在算法和硬件协同设计的基础上,在基于FPGA的平台上,提出了一种基于HCD加速器的实时优化单目VIO算法。在公共数据集上的实验表明,与桌面上现有的VIO算法相比,该算法具有相当的精度和20fps图像输入的实时性能。
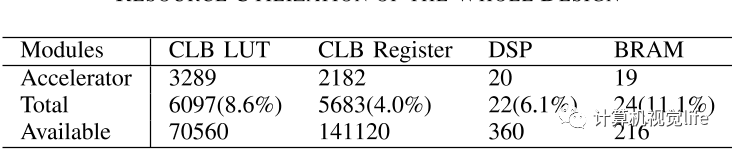
2、利用专用的剪枝和并行化技术,提出了一种新的针对HCD的资源高效的FPGA加速器。与Xilinx提供的最先进的HCD加速器进行了比较,证明了其在硬件效率方面的优势。 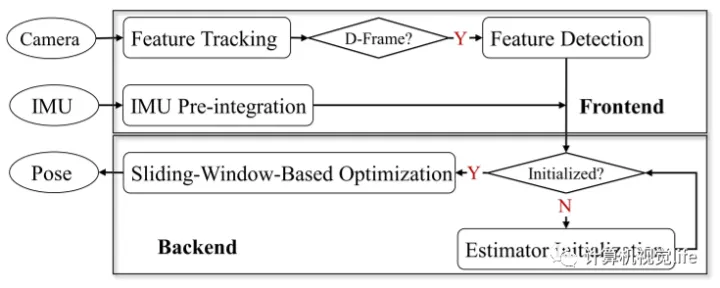
本文由博客一文多发平台 OpenWrite 发布!
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)