小车巡线代码
#include<ros/ros.h>
#include<sensor_msgs/Image.h>
#include<geometry_msgs/Twist.h>
#include<cv_bridge/cv_bridge.h>
#include<opencv2/opencv.hpp>
#include<opencv2/imgproc.hpp>
#include<opencv2/imgproc/types_c.h>
#include<opencv2/core/core.hpp>
double twist_linear_x , twist_angular_z;
sensor_msgs::Image hsv_image ;
void image_Callback(const sensor_msgs::Image& msg);
int main(int argc, char **argv){
ros::init(argc, argv, "follower_line");
ros::NodeHandle nh;
ros::Subscriber img_sub = nh.subscribe("/sensor_msgs/image_gray", 10, image_Callback);
ros::Publisher cmd_pub = nh.advertise<geometry_msgs::Twist>("/cmd_vel", 10);
ros::Publisher img_pub = nh.advertise<sensor_msgs::Image>("/image_hsv",10);
while(ros::ok()){
geometry_msgs::Twist twist;
twist.linear.x = twist_linear_x;
twist.angular.z = twist_angular_z;
cmd_pub.publish(twist);
img_pub.publish(hsv_image);
ros::spinOnce();
}
return 0;
}
void image_Callback(const sensor_msgs::Image& msg){
cv_bridge::CvImagePtr cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::RGB8);
cv::Mat image = cv_ptr -> image;
cv::Mat hsv = image.clone();
cv::Mat res = image.clone();
cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV);
cv::inRange(hsv, cv::Scalar(0, 0, 0), cv::Scalar(180, 255, 46), res);
int h = image.rows;
int w = image.cols;
int search_top = 3 * h / 4, search_bot = search_top + 20;
for(int i = 0; i < search_top; i ++){
for(int j = 0; j < w; j ++){
res.at<uchar>(i,j) = 0;
}
}
for(int i = search_bot; i < h; i++){
for(int j = 0; j < w; j ++){
res.at<uchar>(i,j) = 0;
}
}
cv::Moments M = cv::moments(res);
if(M.m00 > 0){
int cx = int (cvRound(M.m10 / M.m00));
int cy = int (cvRound(M.m01 / M.m00));
ROS_INFO("cx: %d cy: %d", cx, cy);
cv::circle(image, cv::Point(cx, cy), 10, (0, 0, 255));
int v = cx - w / 2;
twist_linear_x = 0.1;
twist_angular_z = -float(v) / 300 * 0.4;
//cmd_pub.publish(twist);
}
else{
ROS_INFO("not found line!");
twist_linear_x = 0;
twist_angular_z = 0;
//cmd_pub.publish(twist);
}
sensor_msgs::ImagePtr hsv_image_ = cv_bridge::CvImage(std_msgs::Header(), "bgr8", image).toImageMsg();
hsv_image = *hsv_image_;
}
姿态估计(Pose estimation)在计算机视觉领域扮演着十分重要的角色:机器人导航、增强现实以及其它。这一过程的基础是找到现实世界和图像投影之间的对应点。这通常是很困难的一步,因此我们常常用自己制作的或基本的Marker来让这一切变得更容易。
最为流行的一个途径是基于二进制平方的标记。这种Marker的主要便利之处在于,一个Marker提供了足够多的对应(四个角)来获取相机的信息。同样的,内部的二进制编码使得算法非常健壮,允许应用错误检测和校正技术的可能性。
Marker和字典
一个ArUco marker是一个二进制平方标记,它由一个宽的黑边和一个内部的二进制矩阵组成,内部的矩阵决定了它们的id。黑色的边界有利于快速检测到图像,二进制编码可以验证id,并且允许错误检测和矫正技术的应用。marker的大小决定了内部矩阵的大小。例如,一个4x4的marker由16bits组成。
一些ArUco markers的例子:
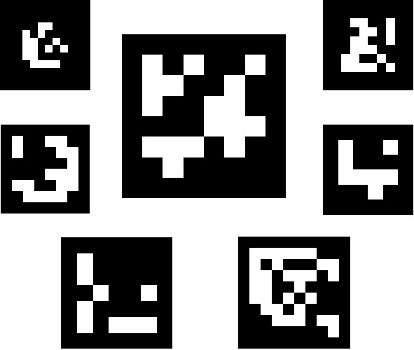
Example of markers images
应当注意到,我们需要检测到一个Marker在空间中发生了旋转,但是,检测的过程需要确定它的初始角度,所以每个角落需要是明确的,不能有歧义,保证上述这点也是靠二进制编码完成的。
markers的字典是在一个特殊应用中使用到的marker的集合。这仅仅是每个marker的二进制编码的链表。
字典的主要性质是字典的大小和marker的大小:
- 字典的大小是组成字典的marker的数量
- marker的大小是这些marker的尺寸(位的个数)
- 在检测之前,我们需要打印marker,以把它们放到环境中。marker的图像可以使用drawMarker()函数生成。
cv::aruco::drawMarker(dictionary, 23, 200, markerImage, 1); ```
首先,我们通过选择aruco模块中一个预定义的字典来创建一个字典对象,具体而言,这个字典是由250个marker组成的,每个marker的大小为6x6bits(DICT_6X6_250)
drawMarker的参数如下:
- 第一个参数是之前创建的字典对象。
- 第二个参数是marker的id,在这个例子中选择的是字典DICT_6X6_250第23个marker。注意到每个字典是由不同数目的Marker组成的,在这个例子中,有效的Id数字范围是0到249。不在有效区间的特定id将会产生异常。
- 第三个参数,200,是输出Marker图像的大小。在这个例子中,输出的图像将是200x200像素大小。注意到这一参数需要满足能够存储特定字典 的所有位。所以,举例而言,你不能为6x6大小的marker生成一个5x5图像(这还没有考虑到Marker的边界)。除此之外,为了避免变形,这一参数最好和位数+边界的大小成正比,至少要比marker的大小大得多(如这个例子中的200),这样变形就不显著了。
- 第四个参数是输出的图像。
- 最终,最后一个参数是一个可选的参数,它指定了Marer黑色边界的大小。这一大小与位数数目成正比。例如,值为2意味着边界的宽度将会是2的倍数。默认的值为1。
- 生成的图像如下:

Generated marker
cv::aruco::detectMarkers(inputImage, dictionary, markerCorners, markerIds, parameters, rejectedCandidates); ```
detectMarkers 的参数为:
- 第一个参数是待检测marker的图像。
- 第二个参数是字典对象,在这一例子中是之前定义的字典 (
DICT_6X6_250). - 检测出的markers存储在
markerCorners 和 markerIds结构中: -
markerCorners 是检测出的图像的角的列表。对于每个marker,将返回按照原始顺序排列的四个角(从左上角顺时针开始)。因此,第一个点是左上角的角,紧接着右上角、右下角和左下角。markerIds 是在markerCorners检测出的所有maker的id列表.注意返回的markerCorners和markerIds 向量具有相同的大小。
- 第四个参数是类型的对象
DetectionParameters. 这一对象包含了检测阶段的所有参数。这一参数将在 下一章节详细介绍。 - 最后的参数,
rejectedCandidates, 返回了所有的marker候选, 例如, 那些被检测出来的不是有效编码的方形。每个候选同样由四个角定义, 它的 形式和markerCorners的参数一样。这一参数可以省略,它仅仅用于debug阶段,或是用于“再次寻找”策略(见refineDetectedMarkers())
在aruco模块,检测是由detectMarkers() 函数完成的
为了展现相机的Pose检测,你需要知道你的相机的校准(Calibration)参数。这是一个相机矩阵和畸变系数。如果你不知道如何校准你的相机,你可以看一看calibrateCamera() 函数,以及OpenCV的校准教程。你同样可以使用aruco模块来校准你的相机,这在使用aruco进行校准的教程中将会介绍。注意这个过程只需要做一次,除非你的相机的光学性质发生了改变(例如调焦)
最后,在校准之后我们得到的是相机矩阵:这是一个3x3的矩阵,包含了焦距和相机中心坐标(相机的内参),以及畸变系数:一个包含五个以上元素的向量,它描述的是相机产生的畸变。
当你用ArUco marker来检测相机Pose时,你可以单独地检测每个Marker的pose。如果你想要从一堆Marker里检测出一个pose,你需要的是aruco板。(参见ArUco板教程)
涉及到marker的相机pose是一个从marker坐标系统到相机坐标系统的三维变换。这是由一个旋转和一个平移向量确定的(参见 solvePnP() 函数)
aruco模块提供了一个函数,用来检测所有
cv::aruco::estimatePoseSingleMarkers(corners, 0.05, cameraMatrix, distCoeffs, rvecs, tvecs);
```
corners 参数是marker的角向量,是由detectMarkers() 函数返回的。- 第二个参数是marker的大小(单位是米或者其它)。注意Pose检测的平移矩阵单位都是相同的。
cameraMatrix 和 distCoeffs 是需要求解的相机校准参数。rvecs 和 tvecs 分别是每个markers角的旋转和平移向量。
这一函数获取的marker坐标系统处在marker重心,Z坐标指向纸面外部,如下图所示。坐标的颜色为,X:红色,Y:绿色,Z:蓝色。
检测参数
阈值化
检测的第一步是输入图像的阈值化。
例如,上述样例中的图像阈值化的结果如下:
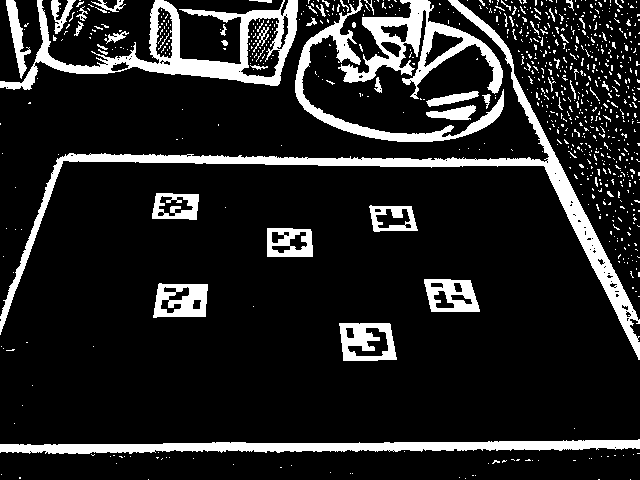
Thresholded image
这一阈值化过程由以下几个参数决定:
int adaptiveThreshWinSizeMin, int adaptiveThreshWinSizeMax, int adaptiveThreshWinSizeStep
adaptiveThreshWinSizeMin 和 adaptiveThreshWinSizeMax 参数代表选择的自适应阈值窗口大小(以像素为单位)间隔(具体参见OpenCV的 threshold()函数)。
参数adaptiveThreshWinSizeStep表明了窗口从adaptiveThreshWinSizeMin到adaptiveThreshWinSizeMax大小的增量。
例如,对于adaptiveThreshWinSizeMin=5,adaptiveThreshWinSizeMax=21以及adaptiveThreshWinSizeStep=4,那么将会产生5个阈值化步骤,窗口大小分别为5, 9, 13, 17 和 21。在每个阈值化图像中,都会选出一些marker候选。
如果marker大小太大的话,较小的窗口大小可能会切割marker的边界,所以它将不会被检测到,就像下图一样:
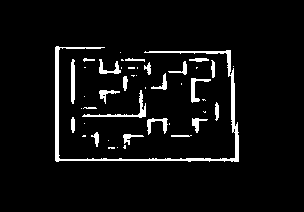
Broken marker image
另一方面,如果marker太小的话,较大的窗口大小也会有类似的效果。此外这一过程将会趋向于全局阈值,而失去了自适应的特性。
最简单的例子是对adaptiveThreshWinSizeMin和 adaptiveThreshWinSizeMax使用相同的值,这样就只会执行一次阈值化步骤。但是,最好还是使用一个范围的值作为窗口大小,虽然较多的阈值化步骤会在一定程度上降低性能。
缺省参数:adaptiveThreshWinSizeMin: 3, adaptiveThreshWinSizeMax: 23, adaptiveThreshWinSizeStep: 10
double adaptiveThreshConstant
这一参数表达了阈值状态下的常量(参见Opencv函数)。它的默认值是大多数例子下较好的情况。
默认值: 7
轮廓滤波
阈值化之后,我们需要检测轮廓。但是,我们并不会把所有的轮廓都当作是候选。在不同步骤中,我们通过滤波剔除一些不太可能是marker的轮廓。这一章节中的参数可以自定义这一过程。
需要注意到,大多数例子中我们需要平衡检测的性能和效率。所有考虑到的轮廓都会在接下来的过程中做进一步处理,这通常产生了更高的计算消耗。所以,我们希望能够在这一阶段就丢弃错误的候选,而不是下一阶段继续处理。
另一方面,如果滤波的条件过于苛刻,事实上的marker轮廓可能会被错误地剔除,因此,没有检测到marker。
double minMarkerPerimeterRate, double maxMarkerPerimeterRate
这些参数决定了marker的最小值和最大值,具体来说,是最大最小marker的周长。它们并不是以绝对像素值作为单位,而是相对于输入图片的最大尺寸指定的。
例如,大小为640x480,最小相对marker周长为0.05的图像,将会产生一个最小周长640x0.05 = 32(像素)的marker,因为640是图像的最大尺寸。参数 maxMarkerPerimeterRate 也是类似的。
如果 minMarkerPerimeterRate太小,检测阶段性能会降低,因为会有更多的轮廓进入到接下来的阶段。这一弊端对于 maxMarkerPerimeterRate参数而言不是那么显著,因为小的轮廓数目通常要多于大的轮廓。选取 minMarkerPerimeterRate值为0以及值为4,就相当于考虑了图像中的所有轮廓,但是出于性能考虑这是不推荐的。
缺省值:
Default values:minMarkerPerimeterRate : 0.03, maxMarkerPerimeterRate : 4.0
double polygonalApproxAccuracyRate
我们对所有的候选进行多边形近似,只有近似结果为方形的形状才能通过测试。这一值决定了多边形近似产生的最大误差(参见approxPolyDP() 函数)。
这一参数是相对于候选长度的(像素上)。所以如果候选的周长为100像素,polygonalApproxAccuracyRate的值为0.04,那么最大的误差应当为100x0.04=5.4像素。
在大多例子中,缺省参数的表现已经很好了,但对高失真的图像,我们需要更大的误差值。
缺省值:0.05
double minCornerDistanceRate
同一张marker中每一对角的最小距离。这是相对于marker周长的值。像素的最小距离为Perimeter * minCornerDistanceRate.
缺省值: 0.05
double minMarkerDistanceRate
两张不同的marker之间的任一对角的最小距离。它表示相对于两个marker的最小标记周长。如果两个候选太接近,较小的一个被忽略。
缺省值:0.05
marker角到图像边缘最小距离。部分图像边缘被遮挡的marker也能被正确地检测出来,如果遮挡部分比较小的话。但是,如果其中一个角被挡住了,返回的角通常在图像边界的一个错误的位置。
如果marker角的位置很重要的话,例如你想要做pose检测,最好舍弃掉那些离图像边缘太接近的角。否则就没有必要。
缺省值:3
比特位提取
检测到候选之后,我们需要分析每个候选的比特位,来确定它们是不是marker。
在分析二进制编码之前,我们需要提取出比特位。为了达到这个目的,将对透视变换后的图像使用Otsu进行阈值化,来分离黑色和白色像素。
以下是一个透视变换后的图像:
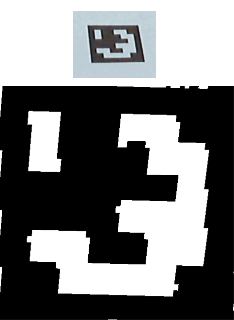
Perspective removing
接下来,图像被划分为网格,和marker位数相同。在每个单元格里,我们统计黑色和白色的个数,决定这个单元格的比特位。

Marker cells
以下参数可以自定义这一过程:
这一参数指定了marker边界的宽度。这和每个比特位的大小相关。因此,值为2意味着边界的长度是两个内部比特位的长度。
这一参数需要和你使用的Marker边界大小一致,边界的大小可以在绘制函数如 drawMarker()中设置。
缺省值:1
这个值决定了进行Otsu的最小标准差的像素值。如果偏差很低,这可能意味着所有方形都是黑色的(或白色的),Ostu将不起作用。如果是这样的话,所有的比特位都根据平均值大于还是小于128被设为0或者1.
缺省值:5.0
int perpectiveRemovePixelPerCell
这一参数决定了透视变换后图像的像素数目(每个单元格,包含边界)。这是上图中红色正方形的大小。
例如,让我们假设我们在处理5x5比特位、边界为1比特位的marker(参见markerBorderBit)。然后,每一维的单元格/比特位的个数为:5 + 2* 1 = 7(边界需要被统计2次)。单元格总体大小为:7x7。
如果perpectiveRemovePixelPerCell的值为10,那么获取到的图像大小为10*7 = 70 -> 70x70
这一参数选择更大的值可以提升比特位的提取过程(在某一程度上),但是它同样也降低了性能。
缺省值:4
double perspectiveRemoveIgnoredMarginPerCell
当提取每个单元格的比特位时,需要统计黑色和白色的像素个数。一般而言,我们不推荐考虑单元格的所有像素。反之,最好忽略单元格的一些像素。
原因在于,透视变换之后,单元格的颜色不会完全分离,白色的单元格可能会混入一些黑色的单元格(反之亦然)。因此,最好忽略这些像素,以避免错误的像素计数。
例如,以下图像:
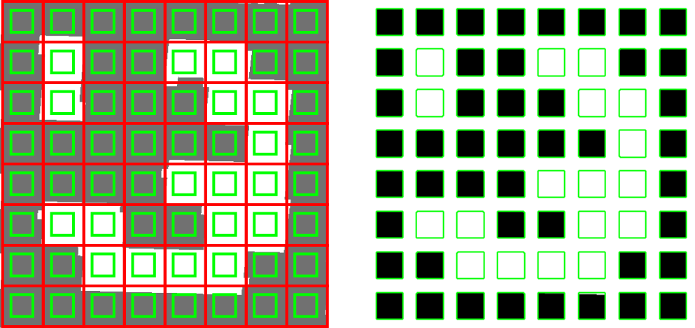
Marker cell margins
我们只考虑处在绿色正方形中的像素。我们可以在右边的图像中看到,最终的像素包含了邻域单元格更少的噪声。参数perspectiveRemoveIgnoredMarginPerCell 指明了红色和绿色正方形之间的距离。
这一参数是相对于单元格整体的大小的。例如,如果单元格的大小为40像素,这一参数的值为0.1,那么大小为40*0.1=4像素的边界将被剔除。这意味着每个单元格实际上要分析的像素大小为32x32,而不是40x40。
缺省值:0.13
Marker ID
比特位提取之后,接下来的步骤是检查提取的编码是否属于这个marker字典,有必要的话,还需要做错误检测步骤。
double maxErroneousBitsInBorderRate
marker边界的比特位应当是黑色的。这一参数指明了允许的边界出错比特位的个数。如,边界可以出现的白色比特位的最大值。它的大小相对于marker中的比特位总数。
缺省值:0.35
double errorCorrectionRate
每个marker字典有一位可以纠正的理论最大值(Dictionary.maxCorrectionBits)。但是,这个值可以由errorCorrectionRate 参数来修改。
例如,如果允许纠正的比特位(对于使用的字典)数目为6, errorCorrectionRate的值为0.5,那么实际上最大的可以纠正的比特位个数为6*0.5=3
这一值对减少错误容忍率以避免错误的位置识别很有帮助。
缺省值:0.6
角落细化(Corner Refinement)
当我们检测完marker,并且验证了它们的id之后,最后要做的一步是在角落处的亚像素级的细化(参见OpenCV cornerSubPix())
注意,这一步是可选的,仅在我们对marker角位置的准确性要求很高时才有意义。例如,pose的检测。这一步骤很耗费时间,所以默认下是不做的。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)