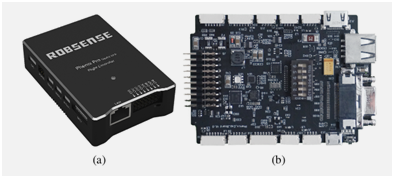
APM飞控 1)OcPoC(Octagonal Pilot on Chip):(Aerotenna公司开发, 运行固件为APM) 它由Aerotenna公司开发,成立于2015年,位于美国堪萨斯大学生物科学与技术业务中心。 OcPoC扩展了其输入和输出功能,以包括完全可编程的PWM,PPM和GPIO引脚,以与大量不同的传感器附加件集成。它还包括许多其他用于外围设备的标准连接器,例如GPS,CSI摄像机链接和SD卡。它运行ArduPilot软件平台。
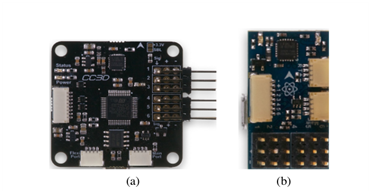
PIXHAWK/PX4:(苏黎世大学的 Computer Vision and Geometry Lab and Autonomous System Lab,固件为PX4和APM) 它是由苏黎世联邦理工学院的计算机视觉和几何实验室和自治系统实验室设计的基于计算机视觉研究的飞行控制。它是PX4飞行控制器系统(即外壳(密集化)和可能的改进连接(改进接口))的演变。它由一个PX4-Flight管理单元(FMU)控制器和一个集成有集成PX4-IO的PX4-IO组成,具有附加的IO,内存和其他功能。此外,它与Linux Foundation DroneCode项目紧密合作。