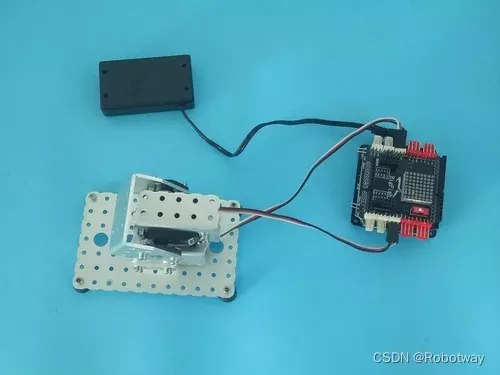
/*------------------------------------------------------------------------------------
版权说明:Copyright 2022 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved. Distributed under MIT license.See file LICENSE for detail or copy at https://opensource.org/licenses/MIT by 机器谱 2022-5-31 https://www.robotway.com/ ---------------------------------- 实验功能: 实现云台模组的两个舵机同时运动. ----------------------------------------------- 实验接线: 云台 .-----. | | 控制云台上下的舵机接:D3 .---------. | | 控制云台左右转动的舵机接:D4 | | ----------------- ------------------------------------------------------------------------------------*/ #include <Servo.h> //调用舵机库函数 Servo servo_pin_3; //声明控制云台上下转动的舵机 Servo servo_pin_4; //声明控制云台左右转动的舵机 //程序初始化部分:使能舵机引脚,并设置舵机初始角度 void setup() { servo_pin_3.attach(3); //使能3号舵机 servo_pin_4.attach(4); //使能4号舵机 servo_pin_3.write(0); //3号舵机初始转到0度 servo_pin_4.write(0); //4号舵机初始转到0度 } void loop() { Servo_Move( 0,95, 0,180); //D4舵机缓慢从0度转到180度,同时D3舵机缓慢从0度转到95度 Servo_Move( 95,0, 180,0); //D4舵机缓慢从180度转到0度,同时D3舵机缓慢从95度转到0度 } /*两舵机同时转动子函数.使用方法如下所示: servo_loop_count:表示舵机从A角度转到B角度分成了多少份. delay(20);表示每一份需要的延时时间. Servo_Move( 30, 45, 23, 80 );表示的意识是:D4舵机缓慢从23度转到80度,同时D3舵机缓慢从30度转到45度 Servo_Move( 45, 30, 80, 23 );表示的意识是:D4舵机缓慢从80度转到23度,同时D3舵机缓慢从45度转到30度 */ void Servo_Move(float servo3_start_angle, float servo3_end_angle, float servo4_start_angle, float servo4_end_angle){ servo_pin_3.write( servo3_start_angle ); //设置3号舵机初始角度 servo_pin_4.write( servo4_start_angle ); //设置4号舵机初始角度 float xunhuan_count = 30.0; float delta_servo3 = 0; float delta_servo4 = 0; float servo3_calculate_angle = 0; float servo4_calculate_angle = 0; int servo3_really_angle = 0; int servo4_really_angle = 0; delta_servo3 = - ( ( servo3_start_angle - servo3_end_angle ) / xunhuan_count ); delta_servo4 = - ( ( servo4_start_angle - servo4_end_angle ) / xunhuan_count ); for( float i = 0; i< xunhuan_count; i++ ) { servo3_calculate_angle = servo3_calculate_angle + delta_servo3; servo4_calculate_angle = servo4_calculate_angle + delta_servo4; servo3_really_angle = int(servo3_calculate_angle); servo4_really_angle = int(servo4_calculate_angle); servo_pin_4.write(servo4_really_angle); servo_pin_3.write(servo3_really_angle); delay(20); } } |