引用格式:张海平.北斗三号中长基线RTK卡尔曼滤波算法[J].测绘科学,2020,45(12):28-33,61.
北斗三号中长基线RTK
卡尔曼滤波算法
张海平
(山东省国土测绘院,济南
25
0
1
0
2)
摘 要:
针对B
DS-3
星座的中长基线实时动态定位,该文提出了一种基于组合观测值的
RTK
卡尔曼滤波定位算法。忽略差分模型后的大气延迟残差影响,以位置参数和组合观测值的双差模糊度作为状态向量进行滤波估计,并采用LAMBDA方法搜索固定模糊度,将模糊度固定后的组合观测值当作高精度的“伪距”观测值直接进行定位解算。通过山东省35
~
65
km基线数据测试结果表明:B
DS-3
超宽巷滤波定位的模糊度固定率基本接近100%,其平面精度为厘米级,高程精度为分米级;B
DS-3
宽巷滤波定位的模糊度固定率高达99.2%以上,其平面和高程精度均为厘米级。
关键词:
B
DS-3;
R
TK;
卡尔曼滤波;超宽巷;宽巷
0 引言
北斗卫星导航系统
(B
e
iDou navigation satellite system
,
BDS)
是我国着眼于国家安全和经济社会发展需要,自主建设运行的全球卫星导航系统
(
global navigation satellite system
,
GNSS
)
,坚持“自主、开放、兼容、渐进”的原则,稳步推进北斗系统建设发展,
形成了
“
三步走
”
发展战略
[
1
]
:
2003
年,建成
BDS-1
系统,
由
3
颗
地球静止轨道
卫星(
geostationary Earth orbit,
G
EO
)
卫星组成,为
中国
区域
提供服务;
2012
年,建成
B
DS-2
系统
,
包括5颗
G
EO
卫星、5颗
倾斜地球同步轨道卫星(inclined geo-synchronous orbits,
I
GSO
)以及4颗中圆底地球轨道卫星(
m
edium
E
arth orbit
,
M
EO
)卫星
,
为
亚太地区提供服务;
2018
年
12
月
27
日,
BDS
-
3
全球系统初步建设完成。B
DS
-
3
系统由3G
EO
+3I
GSO
+24M
EO
共30颗卫星组成,
截至
2020
年
3
月,已发射
29
颗,
2020
年
5
月计划发射最后
1
颗,具备了向全球范围提供服务能力。为了更好的与
GNSS
兼容、
BDS-3
与B
DS-2
相比改变两个频点,
3
个民用频点为B
1C
(1
575.42
MHz
)、B
2a
(1
1
76
.
4
5
MHz
)和B
2b
(1
2
07
.
14 MHz
)
[
2
]
。
目前,GNSS实时动态定位
(
rea
l-time kinematic
,
RTK)
作为高精度导航定位的主要方式得到了广泛应用。随着全球GNSS的发展、尤其美国GPS系统第三频点L
5
和我国BDS全系统三频点的播发,
国内外三频
RTK
定位算法成为相关领域研究热点,一是基于无几何模型的常规
三频模糊度解算方
法
(
three carrier ambiguity resolution
,T
CAR
)
[
3-6
]
;一是基于几何模型的
最小二乘模糊度降相关平差法(
least-square ambiguity decorrelation adjustment
,LAMBDA)
[
7-9
]
。常规
TCAR
法先将
每颗卫星作为独立解算单元求解相位距离、再用精确的相位值定位,从伪距观测值开始作为距离基准解算超宽巷模糊度,超宽巷观测值作为基准解算宽巷模糊度,宽巷观测值作为基准解算基本频点模糊度,每步模糊度固定的关键是采用浮点解直接取整法固定
[
3
]
;几何模型
LAMBDA
法将所有卫星的观测方程组成一个整体几何模型,再用
LAMBDA
法搜索模糊度。
以上两种算法
都遵从超宽巷、宽巷和基本频点波长逐级递推的模式,
主要
针对
GNSS
在用频点短基线(小于
15 km
)上的快速定位,对于
BDS-3
新增频点观测值定位算法和精度,尤其是直接用于中长基线(
30~70 km
)定位效果的研究较少
。
本文首先分析了B
DS-3
观测值的组合特性,并选定超宽巷和宽巷组合观测值;其次基于站间星间双差观测方程、以位置参数和双差模糊度作为状态向量,忽略差分后大气延迟残差影响,进行组合观测值的卡尔曼滤波估计,得到模糊度浮点解和方差阵后再通过LAMBDA法搜索模糊度,并将固定的模糊度带入方程中进行R
TK
定位;最后通过山东省实测数据对超宽巷/宽巷观测值(高精度“伪距”观测值)定位算法进行验证分析。
1 BDS三频线性组合特性
B
DS
系统是全球首个全星座播发三频的导航系统,通过线性组合三频相位观测值可以获得长波长、弱电离层延迟、低观测噪声等特点的组合观测值
[10
]
。中长基线由于差分后仍存留少量大气延迟残差,需要选择长波长、低噪声和延迟的组合值,为了保证模糊度的整周特性利于固定需要进行整数线性组合。表1给出了B
DS-2
与B
DS
-3新信号频率和波长。
表
1
信号频率和波长
Tab.
1 Signal Frequency and Wavelength
| BDS-2 | BDS-3 | GPS | Galileo | 频率/MHz | 波长/m |
| - | B1C | L1 | E1 | 1 575.420 | 0.190 3 |
| B1 | - | - | - | 1 561.098 | 0.192 0 |
| B3 | - | - | - | 1 268.520 | 0.236 3 |
| - | - | L2 | - | 1 227.600 | 0.244 2 |
| B2 | B2b | - | E5b | 1 207.140 | 0.248 3 |
| - | B2a | L5 | E5a | 1 176.450 | 0.254 8 |
从表1中可知,B
DS-3
新增了B
1C
和B
2a
频点,利于和GPS、Ga
lileo
系统等的兼容,并且与
BDS-2
在频点B
2
b上重叠。
1.1
线性组合
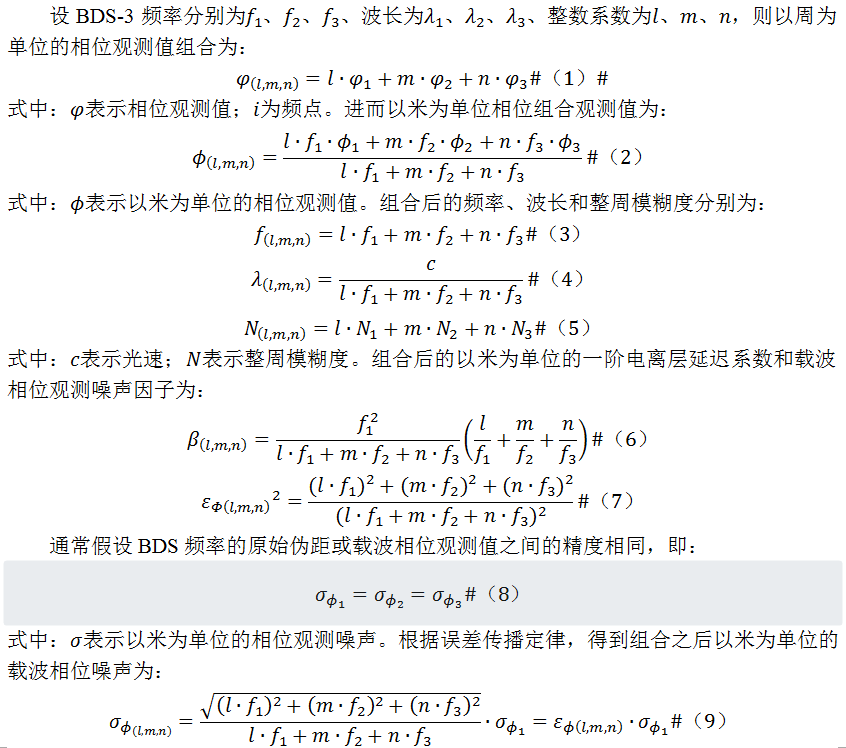
1.2
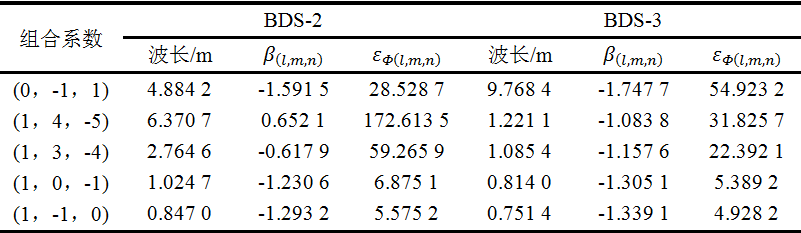
超宽巷/宽巷组合观测值特性
实际定位中,综合定位精度和解算难度因素,通常选择波长大、大气延迟和观测噪声小的组合值,按波长的大小可分为超宽巷(
extra
wide lane
,E
WL
)、宽巷(
wide lane
,
W
L
)、窄巷(na
rrow lane
,N
L
),表2给出一些常用的北斗系统组合观测值及特性,可以看出BDS
-3
的EWL波长是BDS
-2
的2倍,但电离层延迟增大幅度很小,易于中长基线定位解算,综合分析选取超宽巷(0,-1,1)和宽巷(1,-1,0)进行定位较优。
表
2
B
DS
超宽巷/宽巷观测值
T
ab.2 BDS
Extra
Wide Lane/Wide Lane Observation
 2 中长基线卡尔曼滤波算法
2 中长基线卡尔曼滤波算法
常规的RTK由于基线距离较近,站星间的差分技术消除了卫星钟差和接收机钟差,大大削弱了大气延迟误差的影响,可以通过超宽巷或宽巷组合观测值对窄巷进行约束,进而进行高精度定位;对于中长基线差分后仍残留少量大气延迟的残差,窄巷模糊度很难固定,但超宽巷或宽巷具备波长较长的优势,受大气延迟残差影响很弱,其整周模糊度更容易固定
[11-12]
。
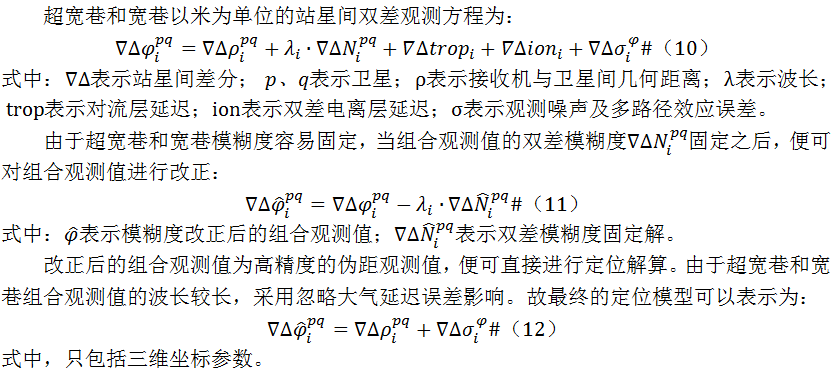
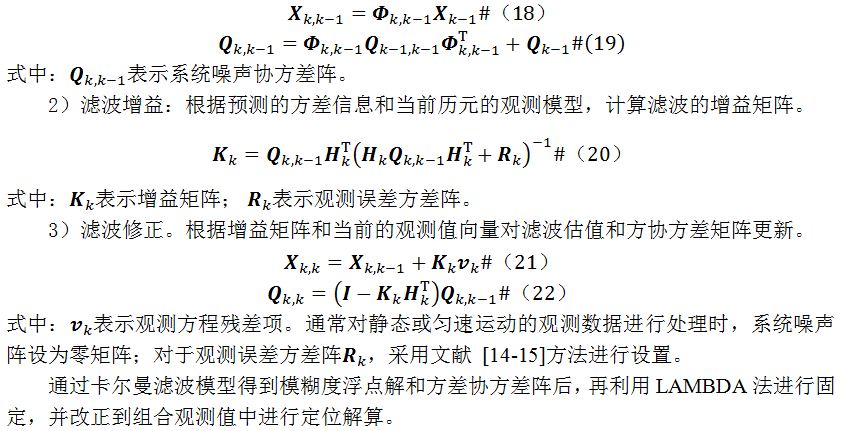
3 附加模糊度参数的卡尔曼滤波模型

 4算例分析
4算例分析
山东省
2019
年
9
月
建设了
124
个站点构成的北斗卫星导航定位基准站网,
具备了
BDS-3观测能力,
采用
省级卫星导航定位基准站1个和临时架设站2个实测
数据进行测试分析
,数据处理过程中可用卫星截止高度角设为15°,
Ratio
阈值设为3。具体数据信息如表3所示。
表
3
静态数据信息
T
ab.3 Static Data Information
| 数据集 | 基线长度/km | 日期 | 观测时长/h | 采样间隔/s |
| JN01-JN02 | 32 | 2020-03-09 | 2 | 1 |
| JN02-JN03 | 49 | 2020-03-09 | 2 | 1 |
| JN03-JN01 | 65 | 2020-03-09 | 2 | 1 |
由于测站之间距离较近,3条基线的卫星数基本相同,以JN
0
2为例对B
DS
-3卫星数进行分析。图1表示可观测卫星数和空间位置精度因子(pos
ition of dilution of precision
,PDOP)值变化。从图中可知:
BDS-3
卫星数基本维持在5
~
6
颗且比较稳定,基本满足
RTK
定位的要求;
PDOP值变化波动较大,初始历元时,P
DOP
值约为7.8,随时时间的推移,P
DOP
逐渐降低,其中在1
800历元时,卫星数增加至6颗,对应的P
DOP
值明显降低。
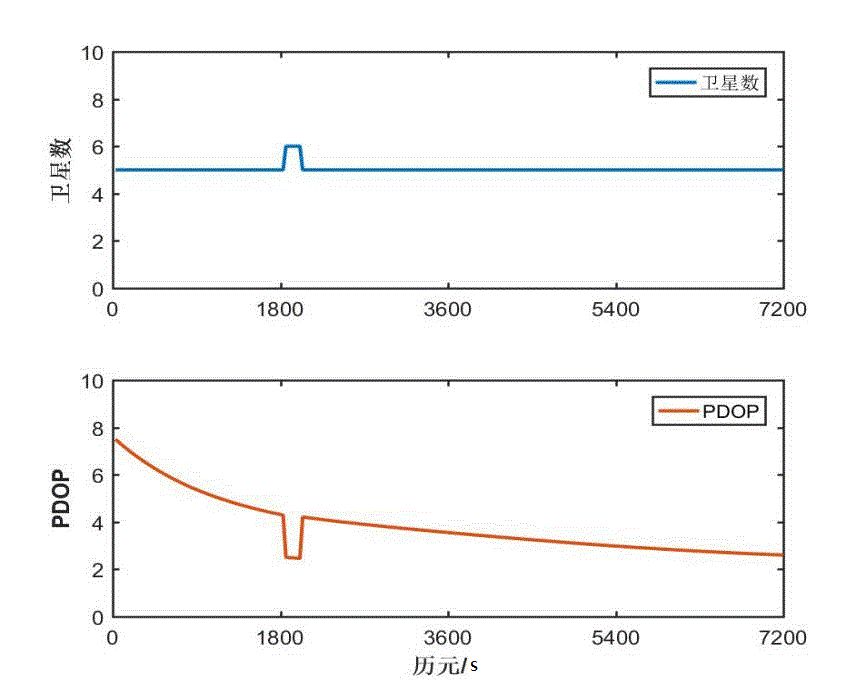
图
1
PDOP和可视卫星数
Fig
.1 PDOP and Number of Satellites
4
.1 BDS
-3超宽巷滤波定位
超宽巷(0,-1,1)组合观测值卡尔曼滤波过程中逐历元用LAMBDA搜索模糊度并进行定位,图2显示了
JN01
、J
N02
和J
N0
3组成的3条基线每个历元Ratio值变化,表4统计了相对应的
模糊度固定率。从图
2
和表
4
中可知:B
DS
-3超宽巷模糊度固定率极高,其中
J
N01
-J
N02
和J
N02-JN03
的模糊的固定率高达100%
,主要是波长很长容易固定
。
图3~图5分别表示
JN01、
J
N02、
J
N03的
B
DS-3超宽巷
R
TK
卡尔曼
滤波
定位偏差,其中
E
、
N
和
U
方向上的误差分别由
d
E
、d
N
和
d
U
表示
,相对应的定位结果R
MS值见
表5。从图
3~
图
5
、表
5
中可知:B
DS
超宽巷滤波R
TK
定位在
E
和
N
方向上的定位精度均在厘米级,高程精度约在分米级;除J
N03
-JN
01
由于基线距离较远,差分后残差较大平面精度在分米级,其余的平面精度均为厘米级。
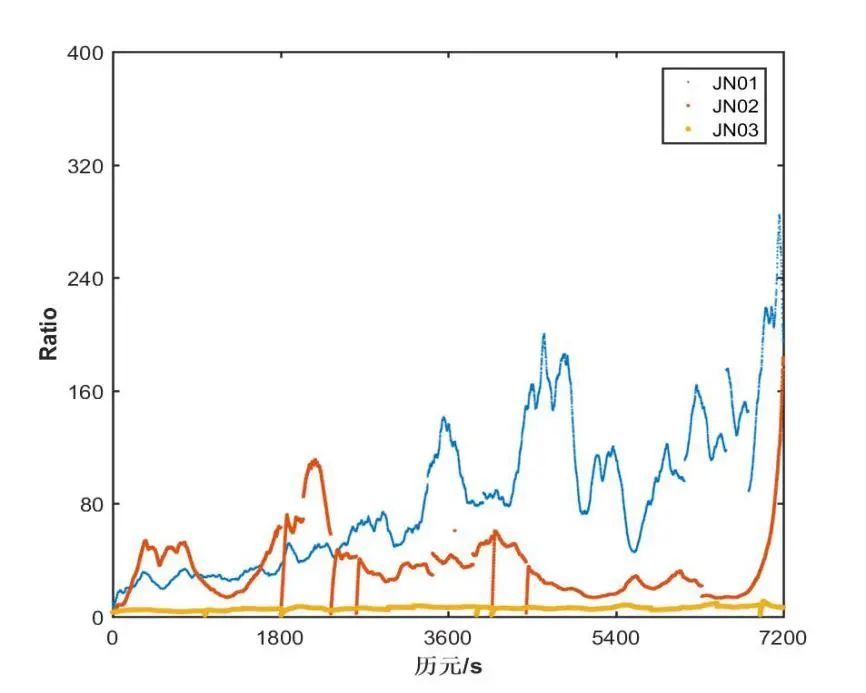
图2
Rati
o
值变化序列图
Fig
.2 Change Sequence Diagram of
Rati
o
表4
模糊度固定率
T
ab.4 Fixed Rate of Ambiguity
| 方案 | 固定率/(%) | 未固定历元/个 | Ratio>3的历元百分比/(%) |
| JN01-JN02 | 100.00 | 0 | 100.00 |
| JN02-JN03 | 100.00 | 0 | 100.00 |
| JN03-JN01 | 99.93 | 5 | 99.93 |
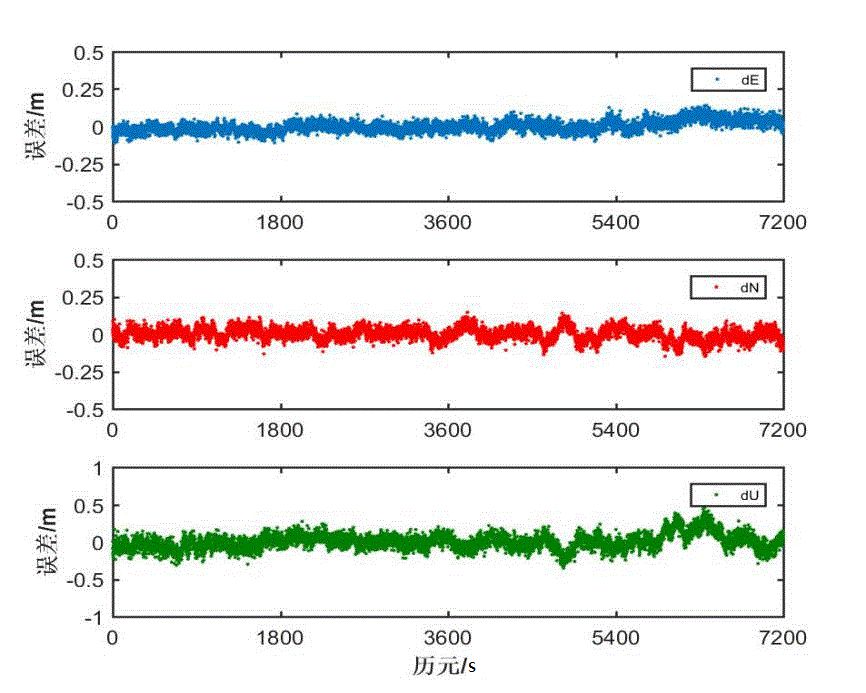
图3
JN01-JN02
超宽巷定位误差
Fig
.
3
JN01-JN02 EWL Positioning Error
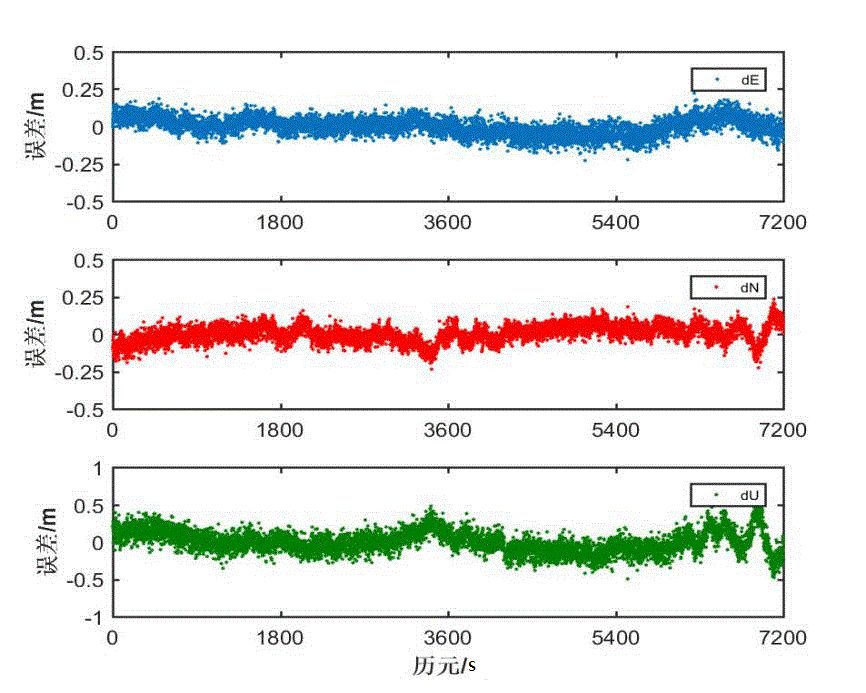
图4
JN0
2
-JN03
超宽巷定位误差
Fig
.4 JN02-JN03 EWL Positioning Error
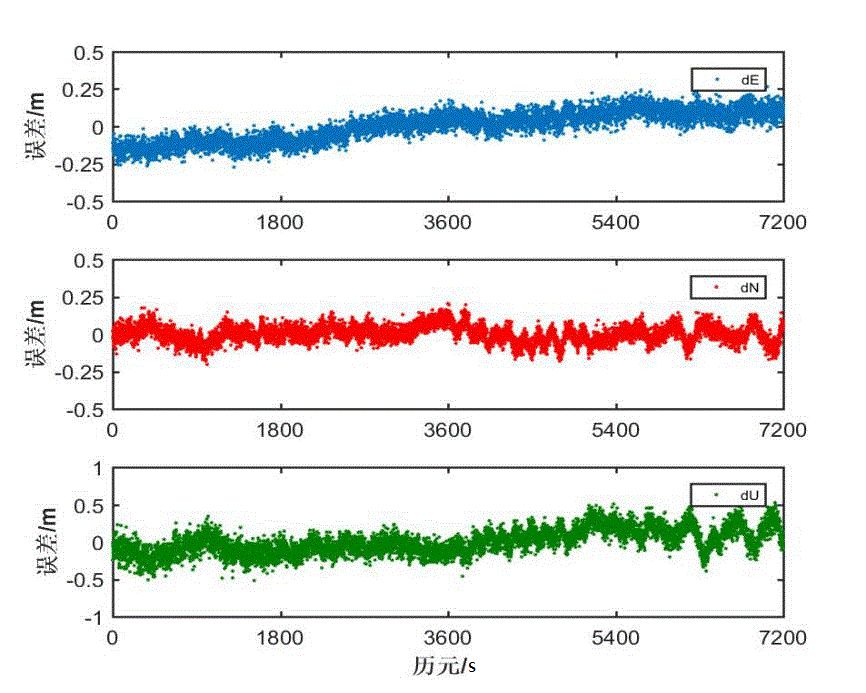
图5
JN0
3
-JN01
超宽巷定位误差
Fig
.
5
JN0
3
-JN0
1
EWL Positioning Error
表5 EWL
定位R
MS
值
T
ab.5 EWL Positioning RMS
m
| 方案 | E方向 | N方向 | U方向 | 平面精度 |
| JN01-JN02 | 0.037 3 | 0.041 5 | 0.103 8 | 0.055 8 |
| JN02-JN03 | 0.057 5 | 0.057 4 | 0.144 4 | 0.081 2 |
| JN03-JN01 | 0.099 0 | 0.057 1 | 0.165 0 | 0.114 3 |
4
.
2
BDS
-3宽巷滤波定位
宽巷(1,-1,0)组合观测值采用同样的处理分析,图6显示了
JN01
、J
N02
和J
N0
3组成的3条基线每个历元的宽巷模糊度搜索Ratio值变化,表6统计了相对应的
模糊度固定率。从图6和表6中可知:B
DS
-3宽巷模糊度固定率极高,其中
JN
01
-J
X02
的模糊度固定率高达100%
,其余两条基线99%以上
。
图7~图9分别表示3条基线B
DS宽巷
R
TK
卡尔曼
滤波
定位偏差,同时统计了相对应的定位结果R
MS值,见
表7。从图7
~图
9、
表
7可知:B
DS
宽巷R
TK
定位在
E
、
N
和
U
方向上的定位精度均在厘米级,其整体精度也在厘米级。
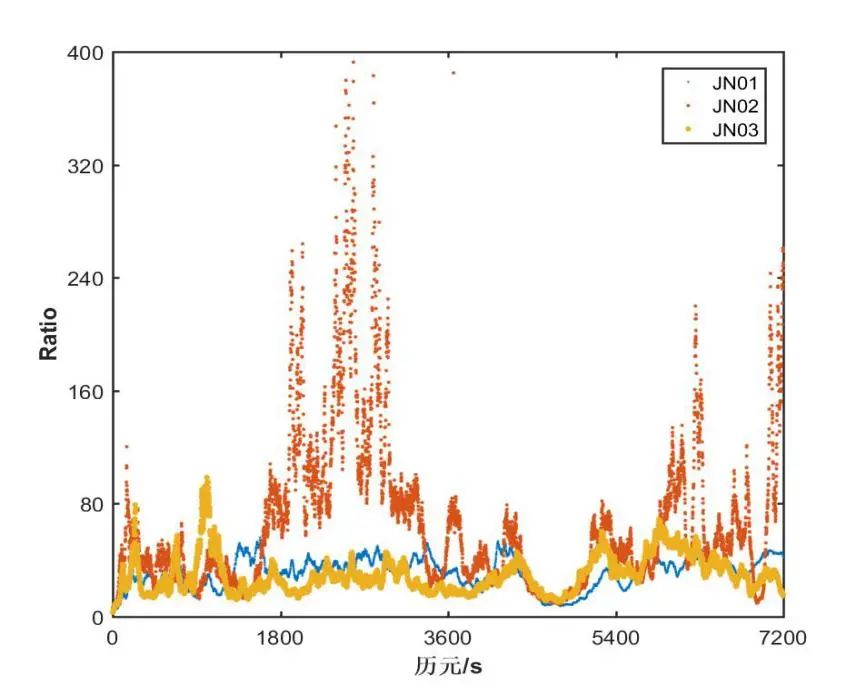
图6
Rati
o
值变化
Fig
.6 Change Sequence Diagram of
Rati
o
表6
模糊度固定率
T
ab.6 Fixed Rate of Ambiguity
| 方案 | 固定率/(%) | 未固定历元/个 | Ratio>3的历元百分比/(%) |
| JN01-JN02 | 100.00 | 0 | 100.00 |
| JN02-JN03 | 99.93 | 5 | 99.92 |
| JN03-JN01 | 99.21 | 57 | 99.11 |
表4和表6比较可以看出,当Ratio=3时,超宽巷和宽巷模糊度固定率基本相当。表5和表7比较可以看出宽巷定位精度明显优于超宽巷,而定位偏差主要是观测误差引起的,其中超宽巷组合后的观测误差是宽巷组合误差的近11倍(表2),因此超宽巷定位精度低于宽巷。
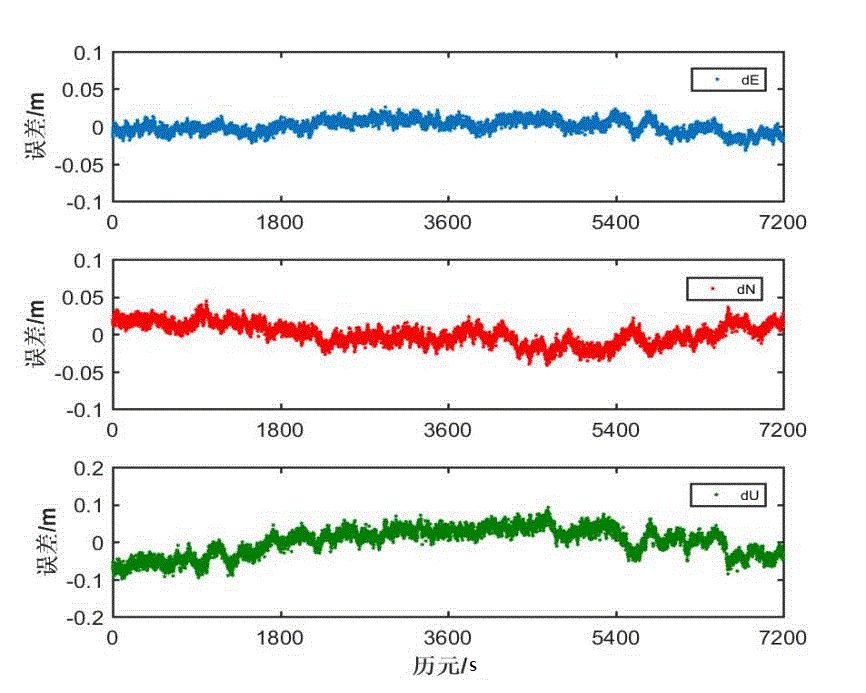
图7
J
N
01-JN02
宽巷定位误差
Fig
.7 JN01-JN02 WL Positioning Error
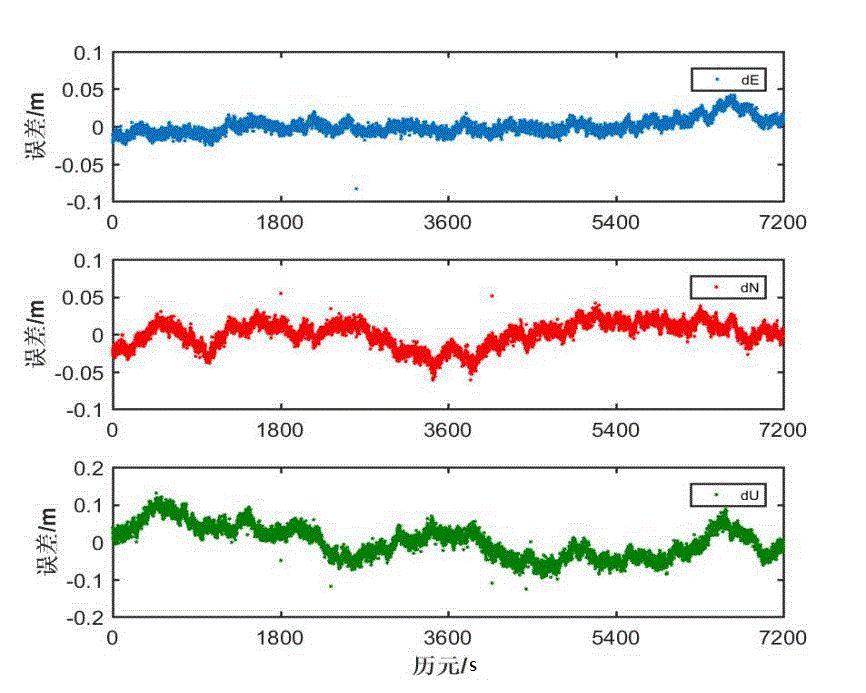
图8
JN0
2
-JN03
宽巷定位误差
Fig
.8 JN02-JN03 WL Positioning Error
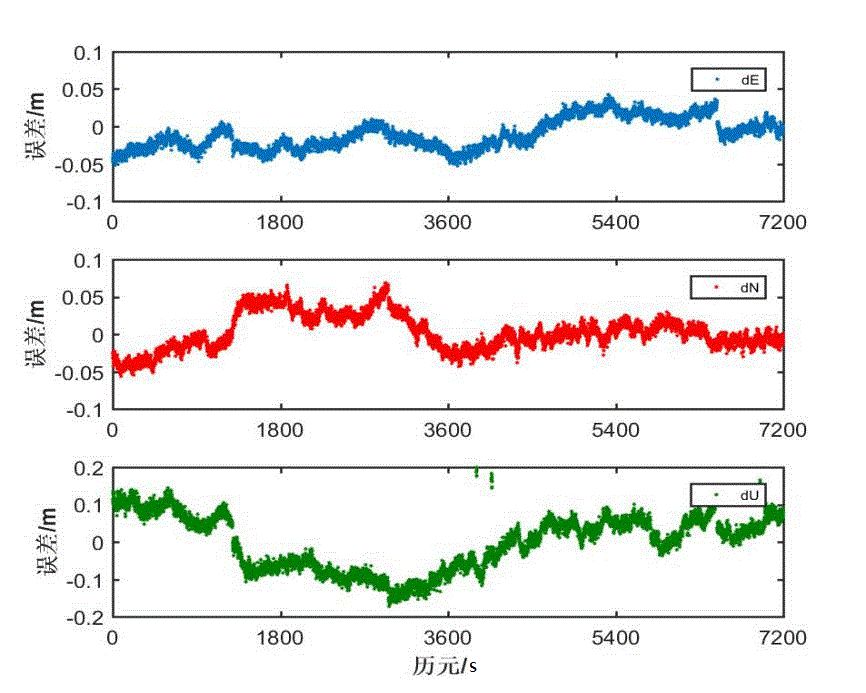
图9
J
N
0
3
-JN01
宽巷定位误差
Fig
.9 JN03-JN01 WL Positioning Error
表7 WL
定位R
MS
值
T
ab.7 RMS of WL Positioning
m
| 方案 | E方向 | N方向 | U方向 | 点位精度 |
| JX01-JN01 | 0.008 9 | 0.014 1 | 0.036 8 | 0.040 4 |
| JX02-JN03 | 0.011 4 | 0.016 9 | 0.043 1 | 0.047 7 |
| JX03-JN01 | 0.034 3 | 0.038 1 | 0.079 6 | 0.094 7 |
5 结束语
本文针对我国BDS
-3
的卫星星座和新的三频信号,分析了三频组合特性并选择了超宽巷(0,-1,1)和宽巷(1,-1,0)组合观测值,提出了一种组合观测值的中长基线RT
K
定位卡尔曼滤波算法,并采用山东省区域(3
0
~
70
km
)基线实测数据实验分析。结果表明:超宽巷观测值在
E
和
N
方向上定位精度均为厘米级,高程精度约为分米级;宽巷观测值在
E
、
N
和
U
方向上的定位精度均为厘米级,点位精度为厘米级。BDS
-3
组合观测值RTK定位为中长基线的厘米级快速定位提供了参考。
作者简介:
张海平
(1977—),男,山东五莲人,高级工程师,
硕士,主要
研究方向为北斗基准站网建设及数据处理。
E-mail:zhp_77@163.com

联系微信:chxszx2018