文章目录
- 一、前言
- 二、SSR修正与PPP
- 三、RTK与PPP-RTK的对比
- 四、PPP-RTK的技术优势
- 五、总结
- 参考文章
欢迎关注个人公众号:导航员学习札记
一、前言
感觉近几年PPP和PPP-RTK一直都是GNSS比较火的方向,也有越来越多的国内外厂商提供相关服务,播发修正数。我之前也写过一些关于RTKLIB PPP的博客,包括了PPP中各项修正及代码解析。具体参见下面博客:
利用SSR修正的RTKLIB PPP测试
DCB差分码偏差概念及应用(附RTKLIB测试对比结果)
RTKlib PPP代码解析
RTKLIB 中的天线相位缠绕误差修正
RTKLIB中的卫星天线与接收机天线修正
二、SSR修正与PPP
PPP采用的是SSR修正,而SSR(State Space Representation,状态空间域)修正其实就是一种修正方式,将观测值误差分解为卫星轨道、卫星钟差、卫星伪距偏差、卫星相位偏差、电离层延迟、对流程延迟等“状态量误差”;与之相对是RTK中的OSR(Observation Space Representation,观测值域),基站直接提供融合了各种修正的观测值。
根据参考[2],RTCM标准委员会把SSR修正数据开发分成三个阶段:
- 第一阶段:包括卫星轨道、卫星时钟、伪距偏差修正数,以及URA
- 第二阶段:包括天顶TEC电离层修正,卫星相位偏差修正
- 第三阶段:包括电离层倾斜修正,对流层修正
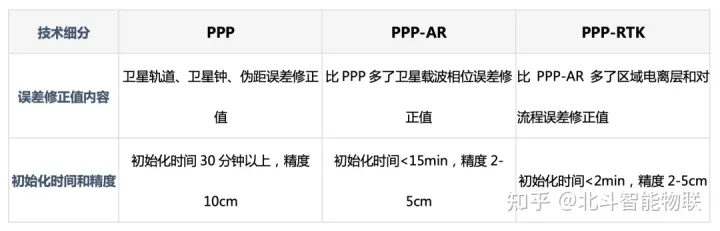
参考千寻的文章[1],PPP根据修正参数的不同,又分为了PPP(浮点解),PPP-AR(固定解)和PPP-RTK(固定解),如下图所示,也正对应了SSR修正的三个阶段。
三、RTK与PPP-RTK的对比
根据参考[1],RTK和PPP-RTK的对比如下图所示:

四、PPP-RTK的技术优势
对于PPP-RTK而言,它虽然可以达到厘米级精度,以及较快的收敛时间(<2min),但是同样也需要基站来计算相位偏差、电离层延迟等参数。对比起RTK,它的优势又在哪里呢?我简单收集了一些公开的观点。
1. 千寻位置(NRTK服务商)观点
参考[1]中提到PPP-RTK主要技术优势有如下四点:
- 基站可稀疏,可密集;(个人观点:但是基站稀疏应该会影响精度和收敛速度)
- 不受单个基站问题影响;(个人观点:是否也能通过冗余或者增加基站解决?)
- 改正数丢失,精度保持更持久;(个人观点:120s似乎也并没有比30s好太多,问题仍然存在,而且重新给改正数之后,收敛时间还比RTK长)
- PPP-RTK另外两项重量级特性“完好性”和“功能安全”(个人观点:似乎是个亮点)
2. 六分科技(NRTK服务商)观点
参考[3]中提到PPP-RTK的主要技术优势有如下四点:
- 快速收敛:利用地基参考网络提供的大气改正数和相位小数偏差产品,PPP-RTK可大大降低模糊度固定时间,实现快速、实时高精度定位技术;(个人观点:仍然比不上RTK固定快)
- 隐私保护:使用PPP-RTK时,终端位置数据无需上报到运营商平台,利于位置数据隐私和安全保护;(个人观点:但是不上传位置会影响性能)
- 全球覆盖:PPP-RTK支持移动通信和卫星播发两种方式,采用卫星播发时,不受地域限制,在移动通信覆盖不到的区域,仍然具有服务能力,可实现全球范围内定位服务的无缝覆盖;(个人观点:但是也要求全球基站,有基站也能移动通信)
- 降本增效:一方面,PPP-RTK的通信带宽要求低,可采用卫星播发,其计算量和播发数据量,不随用户量增长而线性上升,可最大程度节省成本;另一方面,全国覆盖仅需几百个站即可,可极大减少高精度定位服务的相关成本投入。(个人观点:看起来似乎可以节约服务商成本,但是目前用户价格仍然较贵)
3. 其他观点
光明游侠的公众号文章《星地一体PPP-RTK就是个太能手电筒》中有些不同的观点,我也比较认同:
- 对于用户来说,在有局部密集CORS网的情况下,实用动态定位PPP-RTK与NRTK定位精度差不多,但是价格却贵了三四倍,收敛时间慢了十多倍。相较之下,可能NRTK价格更香。
- 在收敛时间上,一分钟的收敛时间对测绘来说问题不大,但是对于驾驶来说就不甚满意了。
五、总结
目前来看,其实我觉得PPP-RTK优势没有特别突出,对用户来说成本比较高,收敛时间也比较慢,服务商列出来的有些优势目前也显得比较鸡肋。长远来看,也许PPP-RTK会有些优势,因为对于智能驾驶来说,由于PPP-RTK的技术特性使得可以对各类改正数进行独立的完好性监控,从而较容易实现完好性和功能安全。
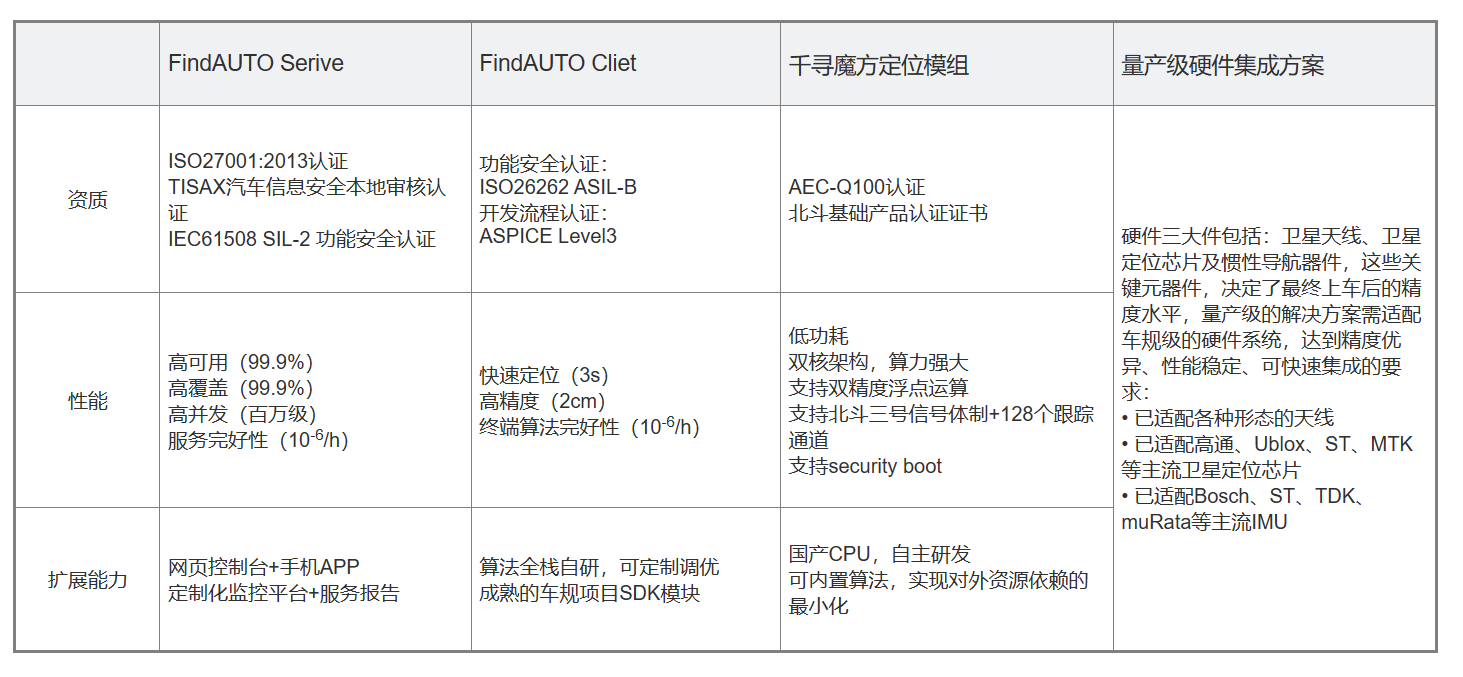
在千寻的官网看了下它的FindAUTO,目前通过一些汽车相关的认证:
- FindAUTO量产级高精度定位解决方案,是千寻位置专为汽车行业打造的定位模组+定位引擎+改正数据服务云端一体的解决方案。
- 通过集成在车载终端的定位模组和定位引擎(FindAUTO Client),结合千寻云端播发的改正数服务(FindAUTO Service),可输出实时可靠的高精度位置、速度、时间、姿态等信息。
参考文章
[1] 既生瑜,何生亮,究竟何为PPP-RTK?
[2] RTCM State Space Representation Messages, Status and Plans
[3] 科普贴|一文秒懂PPP-RTK
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)