1.运行ZED2相机(注意是在ZED_WS工作空间里)
(1)关闭anconda(如果有的话):
conda deactivate
sudo apt-get install pip
pip install catkin-tools rospkg pyyaml empy numpy
(2)运行下面2句,打开ZED2(注意是在ZED_WS工作空间里)
source devel/setup.bash
roslaunch zed_wrapper zed2.launch
2.ctrl+Alt+T再打开一个终端
(1)先关闭conda(如果有的话):
conda deactivate
sudo apt-get install pip
pip install catkin-tools rospkg pyyaml empy numpy
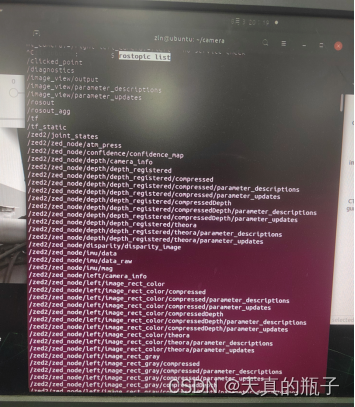
(2)查看运行的节点(在camera里)
rostopic list
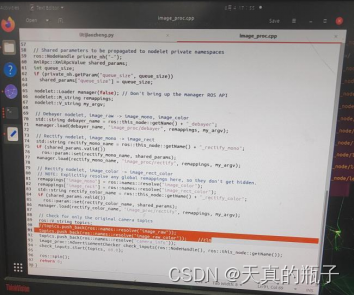
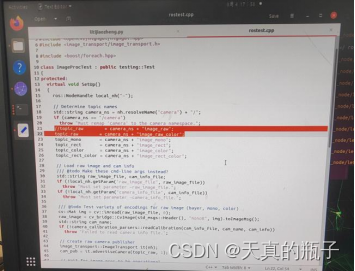
(3)由于相机的话题名称(/zed2/zed_node/left_raw/image_raw)与image_proc的话题名称(/zed2/zed_node/left_raw/image_raw_color)不一致,如下图(先看完再决定要不要做这步!)
因此修改了以下文件
第一个:

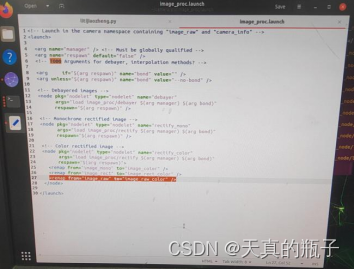
第二个:
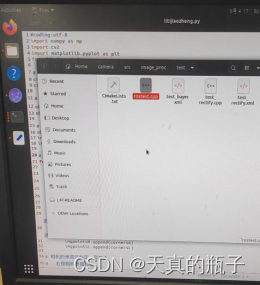
第三个:
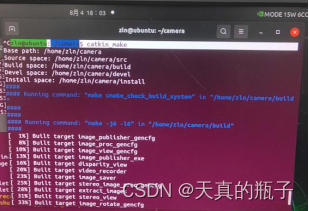
然后重新编译工作空间
不知道(3)中的操作是否起了作用,运行(4)之后没报错了但也一直没反应
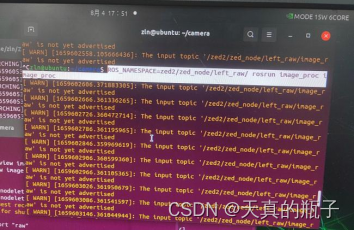
(4)运行下面两句(在camera里)
在我这里(3)还是需要的,不然的话(4)打不开修正后的图像
Source devel/setup.bash
ROS_NAMESPACE=zed2/zed_node/left_raw/ rosrun image_proc image_proc
3.ctrl+Alt+T再打开一个终端
(1)先关闭conda(如果有的话):
conda deactivate
sudo apt-get install pip
pip install catkin-tools rospkg pyyaml empy numpy
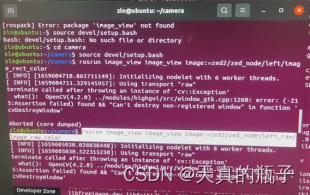
(2)运行image_view
下面两句是查看修正后的图像
source devel/setup.bash
rosrun image_view image_view image:=zed2/zed_node/left/image_rect_color

下面一句是查看矫正前图像
Rosrun image_view image_view image:=zed2/zed_node/left_raw/image_raw_color
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)