1.软件安装:
AD16的安装我就不多介绍了,csdn一搜一大把。要学一个软件,那么软件安装是必经之路,不要认为软件安装不重要。(如果你的安装完之后桌面没快捷方式,那么可以在按下win键在a当中可以看到AD16)
2.软件的界面

可以看到这个界面很简约啊,非常的nice
那是因为你没有新建项目。
在这里的话,我说一下,这个软件最重要的两个文件,一个是原理图,一个是pcb图。想得到pcb图那么前提你得有原理图。以下就是原理图:
原理图:

原理图中包含了你这块pcb的的各种元器件,各个元器件的各个引脚,每个引脚还有特定的名称,引脚相同的在pcb图中是连在一起的,就好比说
芯片上的AD0对应了排针的AD0,所以他们是连在一起的,以此类推,AD1连AD1.....
可能有同学会问,原理图上有很多的GND和VCC,他们也是连在一起的吗?
对的,他们就是连在一起的,所以说,只要名称相同,他们就是连在一起的。
对于我们新手而言,原理图一般不会自己画,一般都是网上抄或者商家提供(手动滑稽)
所以原理图不用过多担心,当我们入门了就可以考虑自己画原理图了。
PBC图:

(这是一张2d平面的pcb图)

(这是一张3d的pcb图)黄色的为焊盘,上面焊的是电子元器件,如电容,电阻什么的。
我们要知道,我们为什么要学习ad16,不就是想画板然后去找商家打板吗,商家要我们提供的文件就是这个pcb文件,所以ad的重中之重就在这一部分。
3.结构介绍
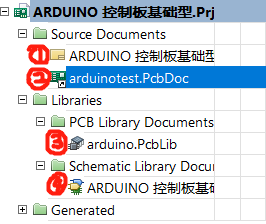
一个完整的项目(prj)所需的4个文件:
1.原理图
2.pcb图
3.原理图库
4.pcb库
这个对于初学者来说十分重要,一般来说,我们开局都是只有一张原理图的,所以说2.3.4都要自己做。而我们的顺序是:利用原理图导出原理图库,然后利用原理图库链接生成pcb库,最终生成我们所需要的pcb图。
4.原理图库的做法
这个简单

在设计的选项中有生成原理图库的选项。

然后我们点击箭头所指的地方返回。
5.pcb库的制作方法

我们先新建一个pcb元件库
这个就有点麻烦了,我们得一个一个的画,但也不是自己画,而是下载别人画好的。



导出然后用ad打开,打开之后,选择这个元器件,Ctrl+C复制,然后打开pcb库,Ctrl+v粘贴。最后双击名称,将名字改为你所需要的元器件名字。

大概就是这样子,然后依次将所以元器件添加就行了。
这里解释一下什么是封装:封装可以理解为你从元器件的正上方往下看,元器件在pcb板上的投影,就像刚刚那个晶振,红色部分在pcb板上表示的是裸露的铜板,也就是焊盘是你要焊的地方。黄色是印刷在pcb板的油墨,是让你在焊晶振的时候能够方便对齐。
常见的封装:
电阻,电容这两兄弟在板子上出现的频率很高,常见的封装形式有0603,0805,1206......数字越大表明这个电阻或者电容越大(指通过的电流,应该按照需求选择),也比较好焊,但也不是越大越好,一般0805就不错。
6.注意
不要直接打开原理图,要先新建一个工程,再打开原理图,不然不能添加原理图库。
因为直接打开原理图,文件是出于free状态下,并不是正式文件。
先发表了。。。以后再写。。。。。。。。。。
总结就是:
先拿一张原理图然后通过生成原理图库,然后依次将原理图库中的元器件在立创商城中下载文件拷贝的到pcb库中,然后做一个映射,对应好关系,然后再通过一键生成导入到pcb图中。。。。。在按照自己喜欢的方式放置元器件,最后布线,就ojbk了。。。。。。。。。。。。。。。。。。。。。。。。
等以后有空再回来写吧,感觉差不多了。
***过了一个学期再回来看这篇文章,感觉之前写的很一般,希望大神能够指正笔者的错误。***
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)