1、硬件准备
LinkIt 7697 *1,继电器模块*1,面包板*1,RGB LED灯*1(共阳极,工作电流20mA,红灯压降2~2.2V,绿灯蓝灯压降3~3.2V),限流电阻2个(一个150Ω,一个100Ω),两头针杜邦线若干,micro USB数据线一根,小号螺丝刀一套,万用表一台。
2、软件准备
1)安装arduino1.8.xxx版。
2)文件-->首选项-->附加开发板管理器网址,设置为:http://download.labs.mediatek.com/package_mtk_linkit_7697_index.json 后保存。
3)工具-->开发板-->开发板管理器,搜索7697,安装0.10.21版(由于网络原因可能会失败,多试几次吧)
4)通过micro USB线将Linkit 7697开发板连接到电脑,在设备管理器中查看,确认可以看到开发板

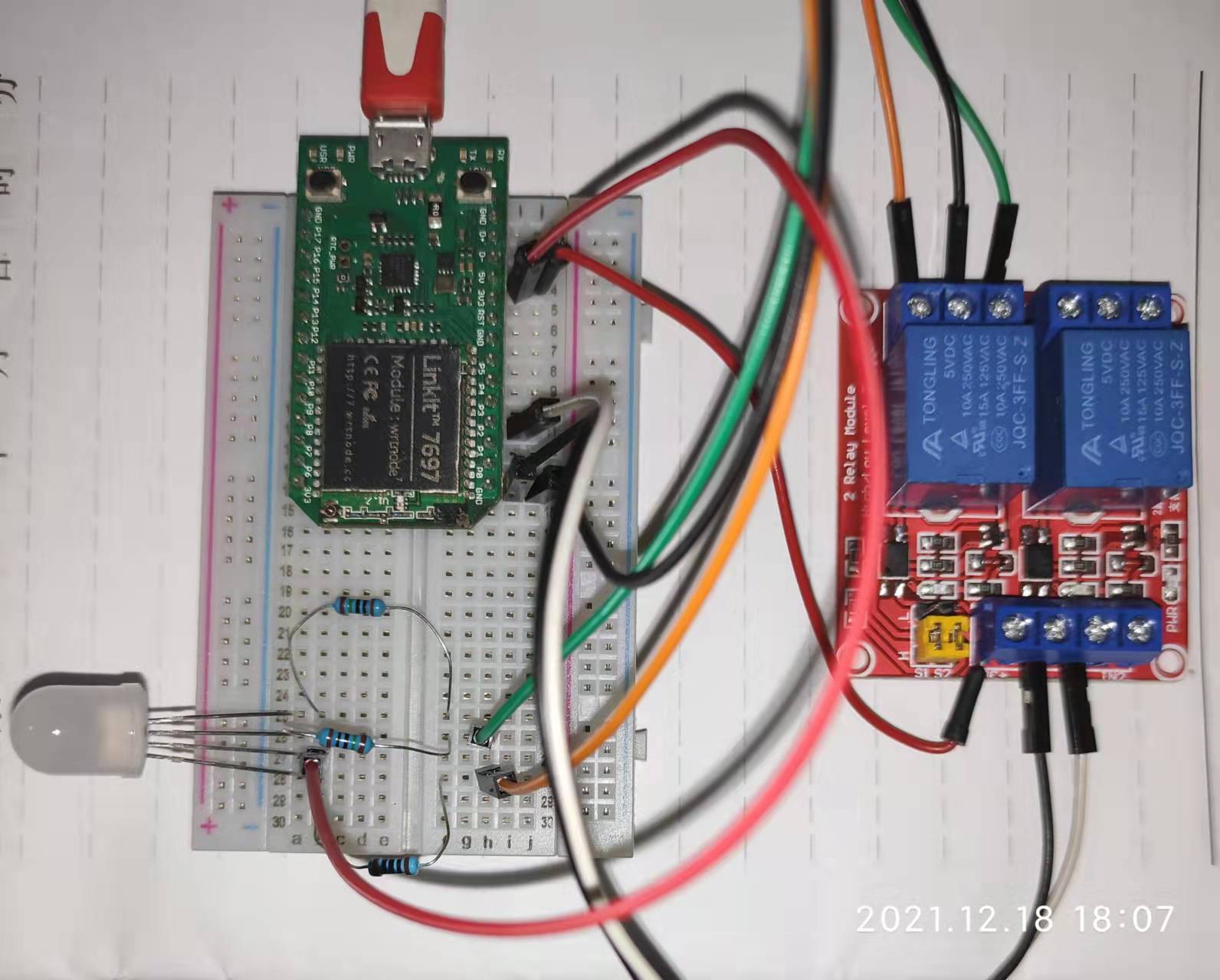
3、硬件连接
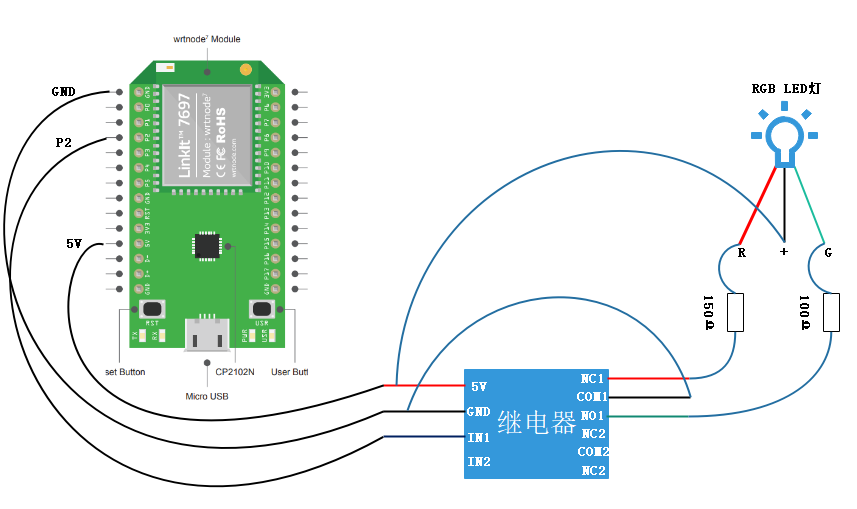
注1:继电器选用单路继电器即可
注2;限流电阻按照LED规格计算选用合适的
4、编程控制
功能描述:供电后,自动连接设定wifi,默认自动切换红绿灯,间隔时间10秒,上位机监听UDP 8080端口,向主控板8080端口发送指令可切换控制方式:
指令1:"change",切换为手动控制,每发送一次切换一次状态,回复"changed"
指令2:"auto",切换回自动控制,回复"auto"
附源码:
#include <LWiFi.h>
#include <WiFiUdp.h>
#include "LTimer.h"
int status = WL_IDLE_STATUS;
char ssid[] = "myfreewifi"; // your network SSID (name)
char pass[] = "jab198438"; // your network password (use for WPA, or use as key for WEP)
int keyIndex = 0; // your network key Index number (needed only for WEP)
int pin = 2;
int state = 0;
int autoCtl = 1;
unsigned int localPort = 8080; // local port to listen on
char packetBuffer[255]; //buffer to hold incoming packet
WiFiUDP Udp;
LTimer timer0(LTIMER_0);
void _callback0(void *usr_data)
{
if (autoCtl==1){
if (state==0) {
digitalWrite(pin, 1);
state = 1;
}else{
digitalWrite(pin, 0);
state = 0;
}
}
}
void setup() {
//Initialize serial and wait for port to open:
pinMode(pin, OUTPUT);
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
// attempt to connect to Wifi network:
while (status != WL_CONNECTED) {
Serial.print("Attempting to connect to SSID: ");
Serial.println(ssid);
// Connect to WPA/WPA2 network. Change this line if using open or WEP network:
status = WiFi.begin(ssid, pass);
}
Serial.println("Connected to wifi");
printWifiStatus();
Serial.println("\nStarting connection to server...");
// if you get a connection, report back via serial:
Udp.begin(localPort);
timer0.begin();
timer0.start(10000, LTIMER_REPEAT_MODE, _callback0, NULL);
}
void loop() {
// if there's data available, read a packet
int packetSize = Udp.parsePacket();
if (packetSize) {
Serial.print("Received packet of size ");
Serial.println(packetSize);
Serial.print("From ");
IPAddress remoteIp = Udp.remoteIP();
Serial.print(remoteIp);
Serial.print(", port ");
Serial.println(Udp.remotePort());
// read the packet into packetBufffer
int len = Udp.read(packetBuffer, 255);
String msg = "";
if (len > 0) {
packetBuffer[len] = 0;
for(int i=0;i<len;i++){
msg += packetBuffer[i];
}
}
Serial.println("Contents:");
Serial.println(msg);
// send a reply, to the IP address and port that sent us the packet we received
Udp.beginPacket(Udp.remoteIP(),8080);
if(msg.startsWith("auto")){
autoCtl = 1;
char ReplyBuffer[] = "auto";
Udp.write(ReplyBuffer);
}else if(msg.startsWith("change")){
autoCtl = 0;
if (state==0) {
digitalWrite(pin, state);
state = 1;
}else{
digitalWrite(pin, state);
state = 0;
}
char ReplyBuffer[] = "changed";
Udp.write(ReplyBuffer);
}else{
Udp.write(packetBuffer);
}
Udp.endPacket();
}
}
void printWifiStatus() {
// print the SSID of the network you're attached to:
Serial.print("SSID: ");
Serial.println(WiFi.SSID());
// print your WiFi shield's IP address:
IPAddress ip = WiFi.localIP();
Serial.print("IP Address: ");
Serial.println(ip);
// print the received signal strength:
long rssi = WiFi.RSSI();
Serial.print("signal strength (RSSI):");
Serial.print(rssi);
Serial.println(" dBm");
}
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)