下载
storm32-bgc-v130电路图(http://download.csdn.net/detail/hxiaohai/9901379)
drv8313器件手册(http://download.csdn.net/detail/hxiaohai/9901400)
(20180602 添加一个1积分的下载链接:https://download.csdn.net/download/hxiaohai/10454432)

storm32三轴手持增稳云台项目实现代码(http://download.csdn.net/detail/hxiaohai/9901414)
proj目录里的为MDK工程项目,代码均在此;sis4目录里为SourceInsight4项目,编辑代码使用,只因为MDK对编码不够友好。
Github:https://github.com/HaydnLiao/GraduationProject/tree/master/storm32/storm32_proj
Gitee(码云):https://gitee.com/HaydnLiao/GraduationProject/tree/master/storm32/storm32_proj

简介
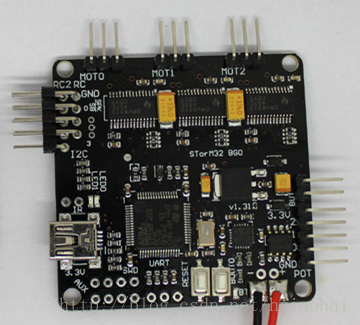
STorM32 BGC常用来做云台控制板,作者是Olliw,板子硬件开源,软件不开源,只提供可下载的hex文件,详细介绍在作者的博客(http://www.olliw.eu/2013/storm32bgc/)。
由于想尝试写三轴手持增稳云台控制,便买了一块板子,主控器为STMF103RCT6,接USART1引脚使用ISP下载方式便可以下载程序。
电路图
以下为STorM32 BGC v130电路图,可以从Olliw博客获取,或者在文首下载。
右键在新标签页中打开即可查看大图。
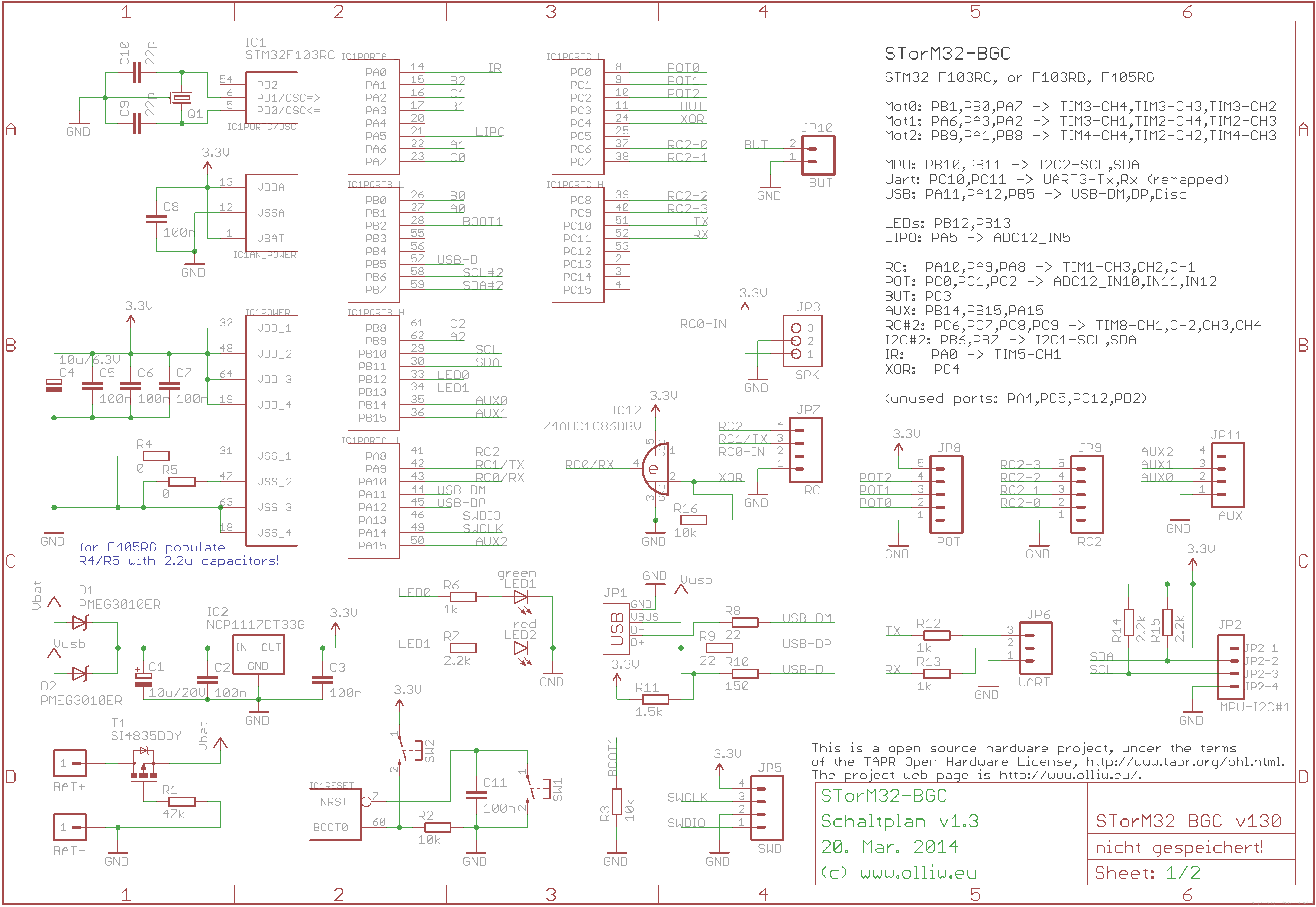
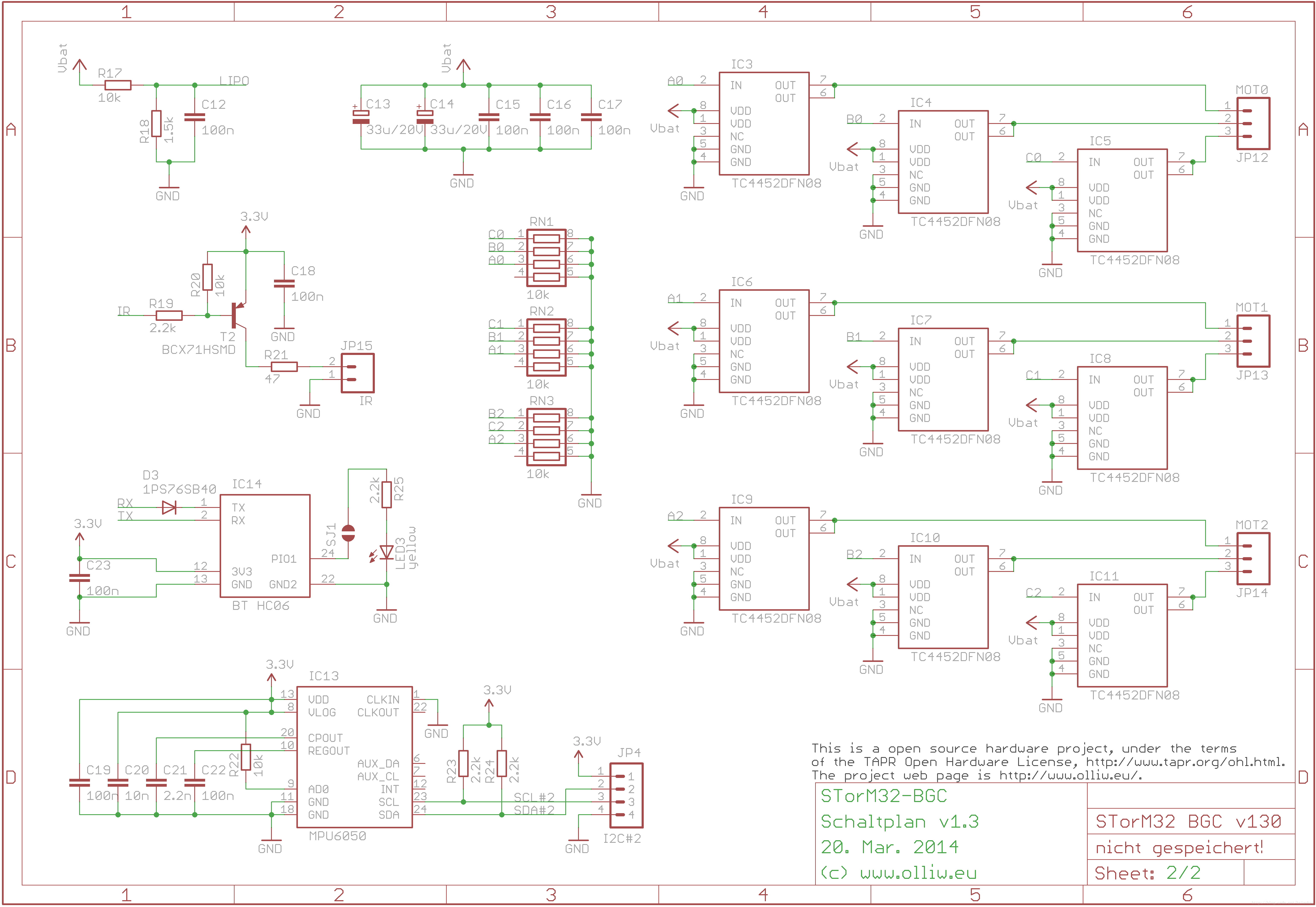
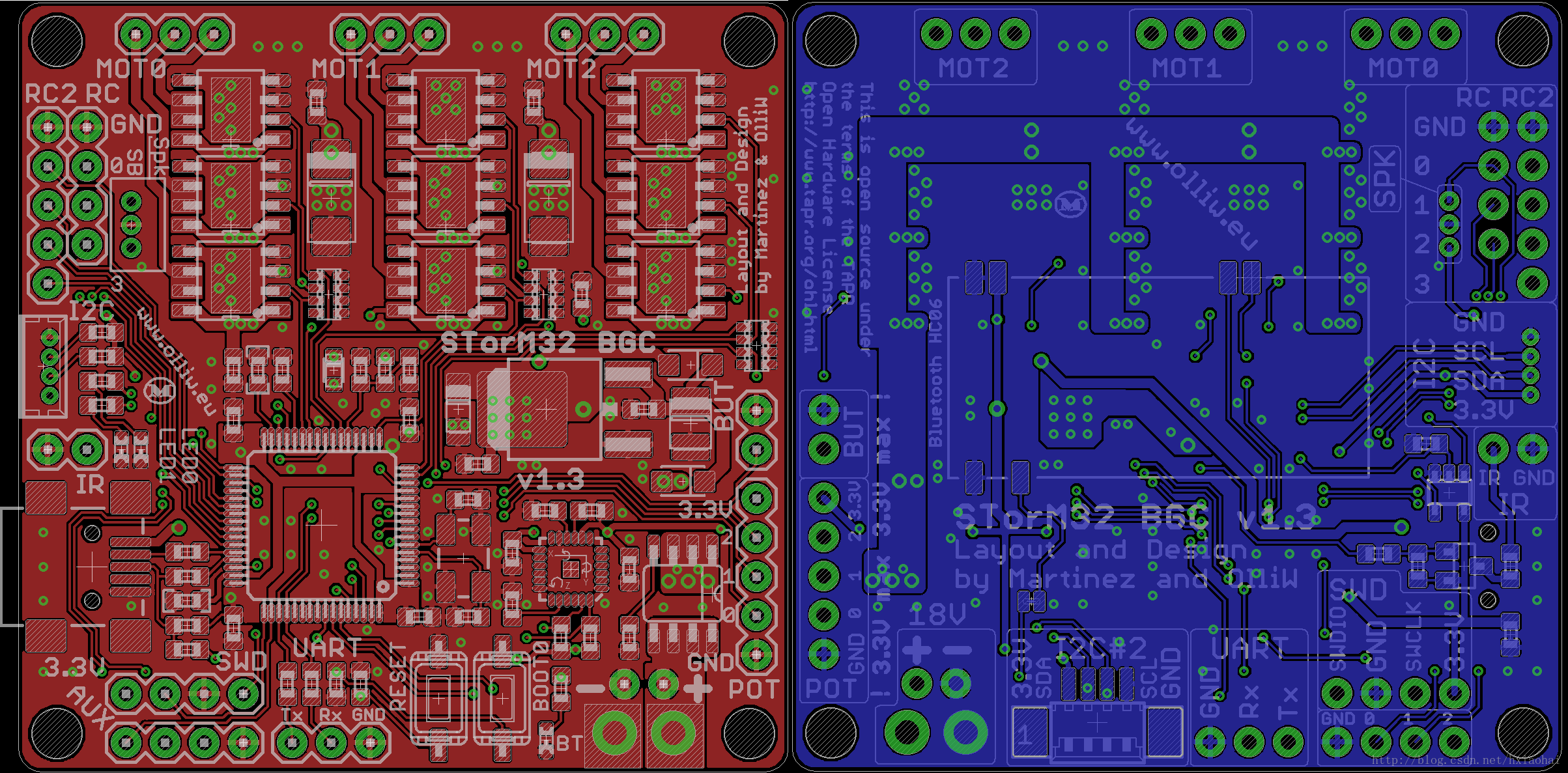
与找到的Olliw提供的电路图稍微有点差异的是电机驱动芯片不同。电路图里使用的是TC4452,买到的板子是用DRV8313,器件手册可在文首下载。连接使用的引脚无差别。
引脚
由Olliw的电路图整理出STM32F130RCT6各引脚的使用情况。
| Device | Port | Function |
|---|
| LED0 | PB12 | |
| LED1 | PB13 | |
| Uart | PC10 | |
| PC11 | UART3_RX (remapped) |
| | |
| Motor0 | PB1 | TIM3_CH4 |
| PB0 | TIM3_CH3 |
| PA7 | TIM3_CH2 |
| Motor1 | PA6 | TIM3_CH1 |
| PA3 | TIM2_CH4 |
| PA2 | TIM2_CH3 |
| Motor2 | PB9 | TIM4_CH4 |
| PA1 | TIM2_CH2 |
| PB8 | TIM4_CH3 |
| I2C#1 | PB10 | I2C2_SCL |
| PB11 | I2C2_SDA |
| I2C#2 | PB6 | I2C1_SCL |
| PB7 | I2C1_SDA |
| LIPO | PA5 | ADC12_IN5 |
| | |
| USB | PA11 | USB_DM |
| PA12 | USB_DP |
| PB5 | USB_DISC |
| RC | PA10 | TIM1_CH3/UART1_RX |
| PA9 | TIM1_CH2/UART1_TX |
| PA8 | TIM1_CH1 |
| POT | PC0 | ADC12_IN10 |
| PC1 | ADC12_IN11 |
| PC2 | ADC12_IN12 |
| BUT | PC3 | |
| AUX | PB14 | |
| PB15 | |
| PA15 | |
| RC#2 | PC6 | TIM8_CH1 |
| PC7 | TIM8_CH2 |
| PC8 | TIM8_CH3 |
| PC9 | TIM8_CH4 |
| IR | PA0 | TIM5_CH1 |
| XOR | PC4 | |
| | |
| PA4 | (unused) | |
| PC5 | (unused) | |
| PC12 | (unused) | |
| PD2 | (unused) | |
实现
根据引脚使用常规的STM32项目开发方式即可实现对硬件的控制。实现的项目代码可在文首下载,水平较低,电机驱动实现可能存在问题,会导致电机发热。项目实际使用的引脚如下。
| 用途 | 引脚 | 引脚功能 |
|---|
| LED0_Green | PB12 | GPIO |
| LED1_Red | PB13 | GPIO |
| Buzzer | PC3 | GPIO |
| UART1_Debug | PA10 | UART1_RX |
| PA9 | UART1_TX |
| Motor0_Pitch | PB1 | TIM3_CH4 |
| PB0 | TIM3_CH3 |
| PA7 | TIM3_CH2 |
| Motor1_Roll | PA6 | TIM3_CH1 |
| PA3 | TIM2_CH4 |
| PA2 | TIM2_CH3 |
| Motor2_Yaw | PB9 | TIM4_CH4 |
| PA1 | TIM2_CH2 |
| PB8 | TIM4_CH3 |
| MPU6050#1 | PB10 | I2C2_SCL |
| PB11 | I2C2_SDA |
| MPU6050#2 | PB6 | I2C1_SCL |
| PB7 | I2C1_SDA |
| LiPo_Voltage | PA5 | ADC12_IN5 |
| Joystick | PC0 | ADC12_IN10 |
| PC1 | ADC12_IN11 |
| PC2 | ADC12_IN12 |
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)