python实现文件上传minio
from minio import Minio
def save_file(bucket, file_name, file_local_path):
minio_client = Minio(
"{0}:{1}".format("10.199.130.173", "9000"),
secure=False,
access_key="在minio中设置的access_key",
secret_key="在minio中设置的secret_key",
)
minio_client.fput_object(bucket, file_name, file_local_path)
print("上传成功!!!")
if __name__ == "__main__":
save_file("桶名", "目标文件:eg:/pre_no.png", "本地文件地址")
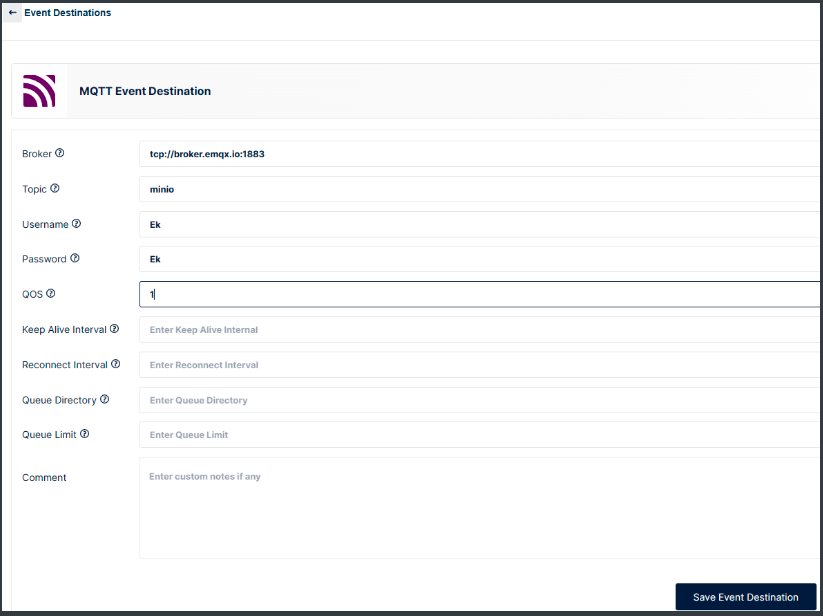
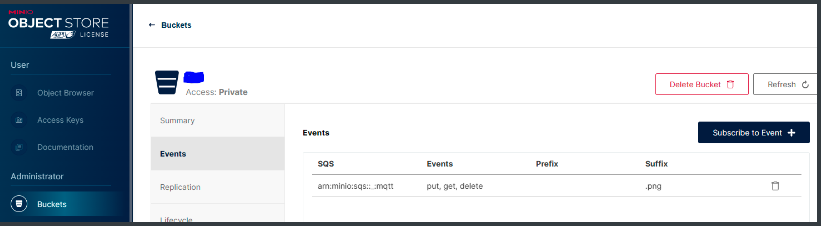
订阅minio创建的话题,当桶信息发生变化时,将结果发送给我们,可以根据收到的信息,判断,新节目上传到了桶上,我们这边发布话题,通知服务器端
from __future__ import print_function
import json
import paho.mqtt.client as mqtt
def on_connect(client, userdata, flags, rc):
print("Connected with result code", rc)
client.subscribe("minio设置的话题")
def on_message(client, userdata, msg):
if msg.retain == 1:
print("此消息是保留信息")
else:
message_json = json.dumps({
'topic': msg.topic,
'payload': msg.payload.decode(),
'qos': msg.qos,
'retain': msg.retain
},sort_keys=True, indent=4, separators=(',', ': '))
print(message_json)
client = mqtt.Client()
client.on_connect = on_connect
client.on_message = on_message
client.connect("broker.emqx.io", 1883)
client.loop_forever()