1. I/O工作模式 STC 32G系列单片机最多有64Pin引脚,最多有60个I/O口。如下图示:
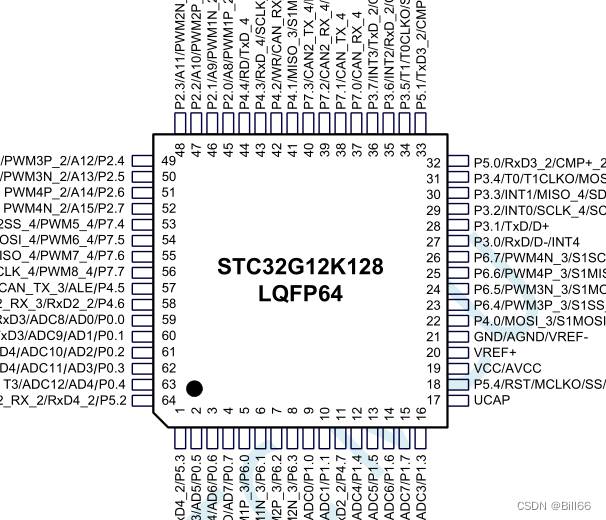
STC32G系列单片机的 I/O口都有4种工作模式:准双向口(弱上拉)、推挽输出(强上拉)、高阻输入(电流不能流入也不能流出)、开漏输出。P30、P31上电复位状态为准双向(弱上拉)模式,其余I/O口上电复位状态为高阻输入,这与STC15系列,有所不同。
要使用I/O口需配置 I/O口的工作模式,STC32G系列单片机除有与工作模式配置有关的端口配置寄存器(PxM0、PxM1)、端口数据寄存器外Px,还有端口上拉电阻控制寄存器(enable/disable 内部4.1K上拉电阻)PxPU、端口施密特触发控制寄存器(enable/disable 施密特触发功能)PxNCS、端口电平转换速度控制寄存器(使转换速度可进行快慢切换)、端口驱动电流控制寄存器(使端口驱动能力能在一般驱动能力与增强驱动能力间切换)PxSR、端口数字信号输入使能控制寄存器(enable/disable 数字信号输入)PxIE、端口下拉电阻控制寄存器(enable/disable内部10K下拉电阻)。较STC15系列单片机要复杂得多。
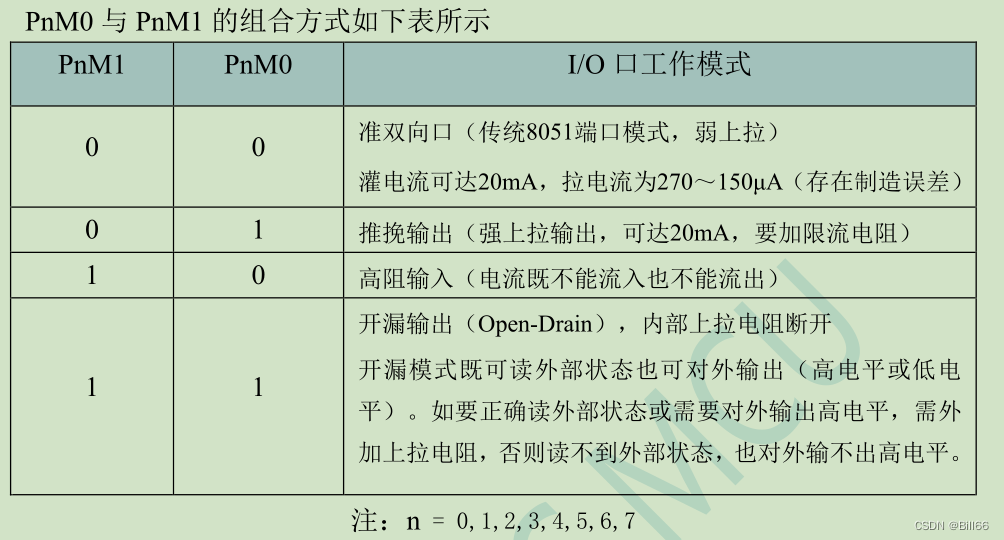
STC32G系列单片机的 I/O口的工作模式通过端口配置寄存器(PxM0、PxM1)来配置,配置方法如下:
2.不同工作模式下的I/O结构图
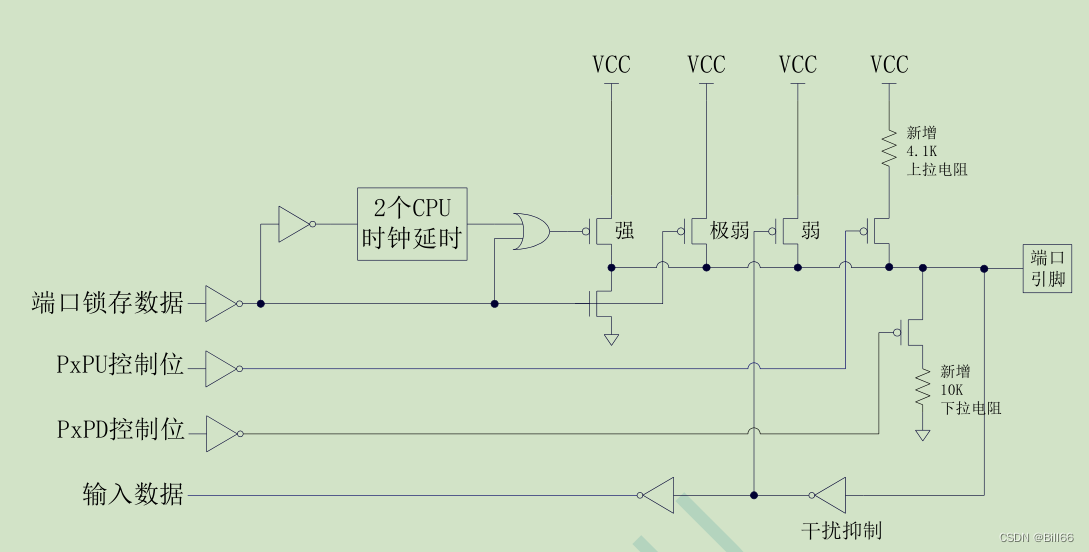
STC32G系列单片机的准双向 I/O结构图如下:

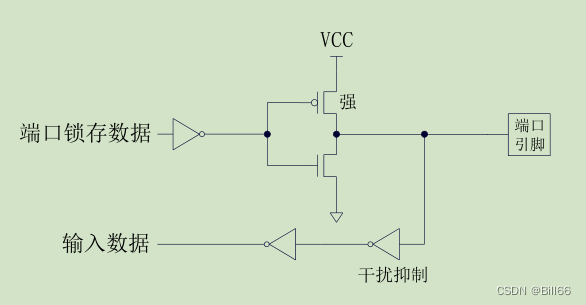
STC32G系列单片机的推挽输出 I/O结构图如下:
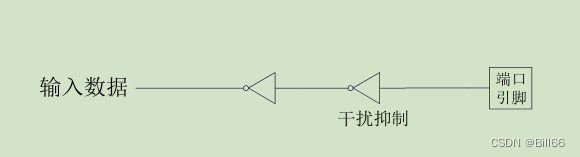
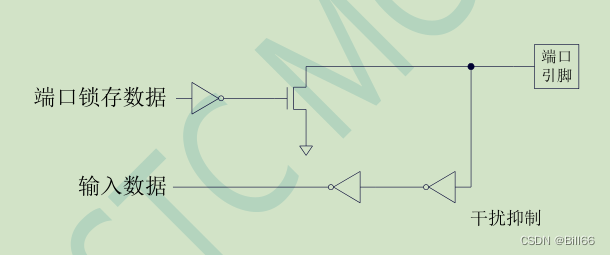
STC32G系列单片机的高阻输入 I/O结构图如下:
STC32G系列单片机的开漏 I/O结构图如下:
STC32G系列单片机相对于STC8位8051单片机新增了4.1K上拉电阻于10K下拉电阻,如下:
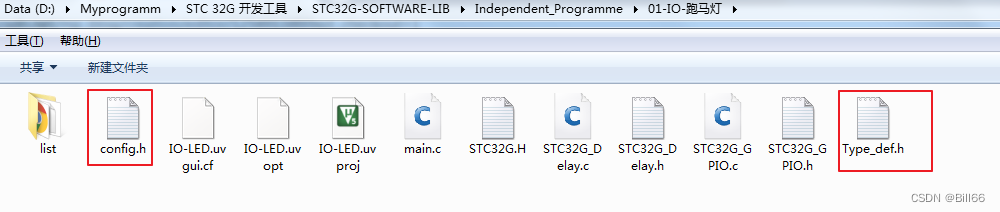
4.库函数 STC 官网上提供了STC32G的库函数目前的最新为第4版,发布日期为2022年6月9号。下载解压后,在library文件夹下可看到的文件如下:

其中STC32G_GPIO.h的代码如下:
/*---------------------------------------------------------------------*/
/* --- STC MCU Limited ------------------------------------------------*/
/* --- STC 1T Series MCU Demo Programme -------------------------------*/
/* --- Mobile: (86)13922805190 ----------------------------------------*/
/* --- Fax: 86-0513-55012956,55012947,55012969 ------------------------*/
/* --- Tel: 86-0513-55012928,55012929,55012966 ------------------------*/
/* --- Web: www.STCMCU.com --------------------------------------------*/
/* --- Web: www.STCMCUDATA.com ---------------------------------------*/
/* --- QQ: 800003751 -------------------------------------------------*/
/* 如果要在程序中使用此代码,请在程序中注明使用了STC的资料及程序 */
/*---------------------------------------------------------------------*/
#ifndef __STC32G_GPIO_H
#define __STC32G_GPIO_H
#include "config.h"
//========================================================================
// 端口模式设置
//========================================================================
//准双向口
#define P0_MODE_IO_PU(Pin) {P0M1 &= ~(Pin), P0M0 &= ~(Pin);}
#define P1_MODE_IO_PU(Pin) {P1M1 &= ~(Pin), P1M0 &= ~(Pin);}
#define P2_MODE_IO_PU(Pin) {P2M1 &= ~(Pin), P2M0 &= ~(Pin);}
#define P3_MODE_IO_PU(Pin) {P3M1 &= ~(Pin), P3M0 &= ~(Pin);}
#define P4_MODE_IO_PU(Pin) {P4M1 &= ~(Pin), P4M0 &= ~(Pin);}
#define P5_MODE_IO_PU(Pin) {P5M1 &= ~(Pin), P5M0 &= ~(Pin);}
#define P6_MODE_IO_PU(Pin) {P6M1 &= ~(Pin), P6M0 &= ~(Pin);}
#define P7_MODE_IO_PU(Pin) {P7M1 &= ~(Pin), P7M0 &= ~(Pin);}
//高阻输入
#define P0_MODE_IN_HIZ(Pin) {P0M1 |= (Pin), P0M0 &= ~(Pin);}
#define P1_MODE_IN_HIZ(Pin) {P1M1 |= (Pin), P1M0 &= ~(Pin);}
#define P2_MODE_IN_HIZ(Pin) {P2M1 |= (Pin), P2M0 &= ~(Pin);}
#define P3_MODE_IN_HIZ(Pin) {P3M1 |= (Pin), P3M0 &= ~(Pin);}
#define P4_MODE_IN_HIZ(Pin) {P4M1 |= (Pin), P4M0 &= ~(Pin);}
#define P5_MODE_IN_HIZ(Pin) {P5M1 |= (Pin), P5M0 &= ~(Pin);}
#define P6_MODE_IN_HIZ(Pin) {P6M1 |= (Pin), P6M0 &= ~(Pin);}
#define P7_MODE_IN_HIZ(Pin) {P7M1 |= (Pin), P7M0 &= ~(Pin);}
//漏极开路
#define P0_MODE_OUT_OD(Pin) {P0M1 |= (Pin), P0M0 |= (Pin);}
#define P1_MODE_OUT_OD(Pin) {P1M1 |= (Pin), P1M0 |= (Pin);}
#define P2_MODE_OUT_OD(Pin) {P2M1 |= (Pin), P2M0 |= (Pin);}
#define P3_MODE_OUT_OD(Pin) {P3M1 |= (Pin), P3M0 |= (Pin);}
#define P4_MODE_OUT_OD(Pin) {P4M1 |= (Pin), P4M0 |= (Pin);}
#define P5_MODE_OUT_OD(Pin) {P5M1 |= (Pin), P5M0 |= (Pin);}
#define P6_MODE_OUT_OD(Pin) {P6M1 |= (Pin), P6M0 |= (Pin);}
#define P7_MODE_OUT_OD(Pin) {P7M1 |= (Pin), P7M0 |= (Pin);}
//推挽输出
#define P0_MODE_OUT_PP(Pin) {P0M1 &= ~(Pin), P0M0 |= (Pin);}
#define P1_MODE_OUT_PP(Pin) {P1M1 &= ~(Pin), P1M0 |= (Pin);}
#define P2_MODE_OUT_PP(Pin) {P2M1 &= ~(Pin), P2M0 |= (Pin);}
#define P3_MODE_OUT_PP(Pin) {P3M1 &= ~(Pin), P3M0 |= (Pin);}
#define P4_MODE_OUT_PP(Pin) {P4M1 &= ~(Pin), P4M0 |= (Pin);}
#define P5_MODE_OUT_PP(Pin) {P5M1 &= ~(Pin), P5M0 |= (Pin);}
#define P6_MODE_OUT_PP(Pin) {P6M1 &= ~(Pin), P6M0 |= (Pin);}
#define P7_MODE_OUT_PP(Pin) {P7M1 &= ~(Pin), P7M0 |= (Pin);}
//========================================================================
// 端口内部4.1K上拉设置
//========================================================================
//上拉使能
#define P0_PULL_UP_ENABLE(Pin) P0PU |= (Pin)
#define P1_PULL_UP_ENABLE(Pin) P1PU |= (Pin)
#define P2_PULL_UP_ENABLE(Pin) P2PU |= (Pin)
#define P3_PULL_UP_ENABLE(Pin) P3PU |= (Pin)
#define P4_PULL_UP_ENABLE(Pin) P4PU |= (Pin)
#define P5_PULL_UP_ENABLE(Pin) P5PU |= (Pin)
#define P6_PULL_UP_ENABLE(Pin) P6PU |= (Pin)
#define P7_PULL_UP_ENABLE(Pin) P7PU |= (Pin)
//上拉禁止
#define P0_PULL_UP_DISABLE(Pin) P0PU &= ~(Pin)
#define P1_PULL_UP_DISABLE(Pin) P1PU &= ~(Pin)
#define P2_PULL_UP_DISABLE(Pin) P2PU &= ~(Pin)
#define P3_PULL_UP_DISABLE(Pin) P3PU &= ~(Pin)
#define P4_PULL_UP_DISABLE(Pin) P4PU &= ~(Pin)
#define P5_PULL_UP_DISABLE(Pin) P5PU &= ~(Pin)
#define P6_PULL_UP_DISABLE(Pin) P6PU &= ~(Pin)
#define P7_PULL_UP_DISABLE(Pin) P7PU &= ~(Pin)
//========================================================================
// 端口施密特触发设置
//========================================================================
//施密特触发使能
#define P0_ST_ENABLE(Pin) P0NCS &= ~(Pin)
#define P1_ST_ENABLE(Pin) P1NCS &= ~(Pin)
#define P2_ST_ENABLE(Pin) P2NCS &= ~(Pin)
#define P3_ST_ENABLE(Pin) P3NCS &= ~(Pin)
#define P4_ST_ENABLE(Pin) P4NCS &= ~(Pin)
#define P5_ST_ENABLE(Pin) P5NCS &= ~(Pin)
#define P6_ST_ENABLE(Pin) P6NCS &= ~(Pin)
#define P7_ST_ENABLE(Pin) P7NCS &= ~(Pin)
//施密特触发禁止
#define P0_ST_DISABLE(Pin) P0NCS |= (Pin)
#define P1_ST_DISABLE(Pin) P1NCS |= (Pin)
#define P2_ST_DISABLE(Pin) P2NCS |= (Pin)
#define P3_ST_DISABLE(Pin) P3NCS |= (Pin)
#define P4_ST_DISABLE(Pin) P4NCS |= (Pin)
#define P5_ST_DISABLE(Pin) P5NCS |= (Pin)
#define P6_ST_DISABLE(Pin) P6NCS |= (Pin)
#define P7_ST_DISABLE(Pin) P7NCS |= (Pin)
//========================================================================
// 端口电平转换速度设置
//========================================================================
//电平转换慢速,相应的上下冲比较小
#define P0_SPEED_LOW(Pin) P0SR |= (Pin)
#define P1_SPEED_LOW(Pin) P1SR |= (Pin)
#define P2_SPEED_LOW(Pin) P2SR |= (Pin)
#define P3_SPEED_LOW(Pin) P3SR |= (Pin)
#define P4_SPEED_LOW(Pin) P4SR |= (Pin)
#define P5_SPEED_LOW(Pin) P5SR |= (Pin)
#define P6_SPEED_LOW(Pin) P6SR |= (Pin)
#define P7_SPEED_LOW(Pin) P7SR |= (Pin)
//电平转换快速,相应的上下冲比较大
#define P0_SPEED_HIGH(Pin) P0SR &= ~(Pin)
#define P1_SPEED_HIGH(Pin) P1SR &= ~(Pin)
#define P2_SPEED_HIGH(Pin) P2SR &= ~(Pin)
#define P3_SPEED_HIGH(Pin) P3SR &= ~(Pin)
#define P4_SPEED_HIGH(Pin) P4SR &= ~(Pin)
#define P5_SPEED_HIGH(Pin) P5SR &= ~(Pin)
#define P6_SPEED_HIGH(Pin) P6SR &= ~(Pin)
#define P7_SPEED_HIGH(Pin) P7SR &= ~(Pin)
//========================================================================
// 端口驱动电流控制设置
//========================================================================
//一般驱动能力
#define P0_DRIVE_MEDIUM(Pin) P0DR |= (Pin)
#define P1_DRIVE_MEDIUM(Pin) P1DR |= (Pin)
#define P2_DRIVE_MEDIUM(Pin) P2DR |= (Pin)
#define P3_DRIVE_MEDIUM(Pin) P3DR |= (Pin)
#define P4_DRIVE_MEDIUM(Pin) P4DR |= (Pin)
#define P5_DRIVE_MEDIUM(Pin) P5DR |= (Pin)
#define P6_DRIVE_MEDIUM(Pin) P6DR |= (Pin)
#define P7_DRIVE_MEDIUM(Pin) P7DR |= (Pin)
//增强驱动能力
#define P0_DRIVE_HIGH(Pin) P0DR &= ~(Pin)
#define P1_DRIVE_HIGH(Pin) P1DR &= ~(Pin)
#define P2_DRIVE_HIGH(Pin) P2DR &= ~(Pin)
#define P3_DRIVE_HIGH(Pin) P3DR &= ~(Pin)
#define P4_DRIVE_HIGH(Pin) P4DR &= ~(Pin)
#define P5_DRIVE_HIGH(Pin) P5DR &= ~(Pin)
#define P6_DRIVE_HIGH(Pin) P6DR &= ~(Pin)
#define P7_DRIVE_HIGH(Pin) P7DR &= ~(Pin)
//========================================================================
// 端口数字信号输入使能
//========================================================================
//使能数字信号输入
#define P0_DIGIT_IN_ENABLE(Pin) P0IE |= (Pin)
#define P1_DIGIT_IN_ENABLE(Pin) P1IE |= (Pin)
#define P2_DIGIT_IN_ENABLE(Pin) P2IE |= (Pin)
#define P3_DIGIT_IN_ENABLE(Pin) P3IE |= (Pin)
#define P4_DIGIT_IN_ENABLE(Pin) P4IE |= (Pin)
#define P5_DIGIT_IN_ENABLE(Pin) P5IE |= (Pin)
#define P6_DIGIT_IN_ENABLE(Pin) P6IE |= (Pin)
#define P7_DIGIT_IN_ENABLE(Pin) P7IE |= (Pin)
//禁止数字信号输入
#define P0_DIGIT_IN_DISABLE(Pin) P0IE &= ~(Pin)
#define P1_DIGIT_IN_DISABLE(Pin) P1IE &= ~(Pin)
#define P2_DIGIT_IN_DISABLE(Pin) P2IE &= ~(Pin)
#define P3_DIGIT_IN_DISABLE(Pin) P3IE &= ~(Pin)
#define P4_DIGIT_IN_DISABLE(Pin) P4IE &= ~(Pin)
#define P5_DIGIT_IN_DISABLE(Pin) P5IE &= ~(Pin)
#define P6_DIGIT_IN_DISABLE(Pin) P6IE &= ~(Pin)
#define P7_DIGIT_IN_DISABLE(Pin) P7IE &= ~(Pin)
//========================================================================
// 定义声明
//========================================================================
#define GPIO_PullUp 0 //上拉准双向口
#define GPIO_HighZ 1 //浮空输入
#define GPIO_OUT_OD 2 //开漏输出
#define GPIO_OUT_PP 3 //推挽输出
#define GPIO_Pin_0 0x01 //IO引脚 Px.0
#define GPIO_Pin_1 0x02 //IO引脚 Px.1
#define GPIO_Pin_2 0x04 //IO引脚 Px.2
#define GPIO_Pin_3 0x08 //IO引脚 Px.3
#define GPIO_Pin_4 0x10 //IO引脚 Px.4
#define GPIO_Pin_5 0x20 //IO引脚 Px.5
#define GPIO_Pin_6 0x40 //IO引脚 Px.6
#define GPIO_Pin_7 0x80 //IO引脚 Px.7
#define GPIO_Pin_LOW 0x0F //IO低4位引脚
#define GPIO_Pin_HIGH 0xF0 //IO高4位引脚
#define GPIO_Pin_All 0xFF //IO所有引脚
#define GPIO_P0 0 //
#define GPIO_P1 1
#define GPIO_P2 2
#define GPIO_P3 3
#define GPIO_P4 4
#define GPIO_P5 5
#define GPIO_P6 6
#define GPIO_P7 7
typedef struct
{
u8 Mode; //IO模式, GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PP
u8 Pin; //要设置的端口
} GPIO_InitTypeDef;
u8 GPIO_Inilize(u8 GPIO, GPIO_InitTypeDef *GPIOx);
#endif
STC32G_GPIO.c中的代码如下:
/*---------------------------------------------------------------------*/
/* --- STC MCU Limited ------------------------------------------------*/
/* --- STC 1T Series MCU Demo Programme -------------------------------*/
/* --- Mobile: (86)13922805190 ----------------------------------------*/
/* --- Fax: 86-0513-55012956,55012947,55012969 ------------------------*/
/* --- Tel: 86-0513-55012928,55012929,55012966 ------------------------*/
/* --- Web: www.STCMCU.com --------------------------------------------*/
/* --- Web: www.STCMCUDATA.com ---------------------------------------*/
/* --- QQ: 800003751 -------------------------------------------------*/
/* 如果要在程序中使用此代码,请在程序中注明使用了STC的资料及程序 */
/*---------------------------------------------------------------------*/
#include "STC32G_GPIO.h"
//========================================================================
// 函数: u8 GPIO_Inilize(u8 GPIO, GPIO_InitTypeDef *GPIOx)
// 描述: 初始化IO口.
// 参数: GPIOx: 结构参数,请参考timer.h里的定义.
// 返回: 成功返回 SUCCESS, 错误返回 FAIL.
// 版本: V1.0, 2012-10-22
//========================================================================
u8 GPIO_Inilize(u8 GPIO, GPIO_InitTypeDef *GPIOx)
{
if(GPIO > GPIO_P7) return FAIL; //错误
if(GPIOx->Mode > GPIO_OUT_PP) return FAIL; //错误
if(GPIO == GPIO_P0)
{
if(GPIOx->Mode == GPIO_PullUp) P0M1 &= ~GPIOx->Pin, P0M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P0M1 |= GPIOx->Pin, P0M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P0M1 |= GPIOx->Pin, P0M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P0M1 &= ~GPIOx->Pin, P0M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P1)
{
if(GPIOx->Mode == GPIO_PullUp) P1M1 &= ~GPIOx->Pin, P1M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P1M1 |= GPIOx->Pin, P1M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P1M1 |= GPIOx->Pin, P1M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P1M1 &= ~GPIOx->Pin, P1M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P2)
{
if(GPIOx->Mode == GPIO_PullUp) P2M1 &= ~GPIOx->Pin, P2M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P2M1 |= GPIOx->Pin, P2M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P2M1 |= GPIOx->Pin, P2M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P2M1 &= ~GPIOx->Pin, P2M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P3)
{
if(GPIOx->Mode == GPIO_PullUp) P3M1 &= ~GPIOx->Pin, P3M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P3M1 |= GPIOx->Pin, P3M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P3M1 |= GPIOx->Pin, P3M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P3M1 &= ~GPIOx->Pin, P3M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P4)
{
if(GPIOx->Mode == GPIO_PullUp) P4M1 &= ~GPIOx->Pin, P4M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P4M1 |= GPIOx->Pin, P4M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P4M1 |= GPIOx->Pin, P4M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P4M1 &= ~GPIOx->Pin, P4M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P5)
{
if(GPIOx->Mode == GPIO_PullUp) P5M1 &= ~GPIOx->Pin, P5M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P5M1 |= GPIOx->Pin, P5M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P5M1 |= GPIOx->Pin, P5M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P5M1 &= ~GPIOx->Pin, P5M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P6)
{
if(GPIOx->Mode == GPIO_PullUp) P6M1 &= ~GPIOx->Pin, P6M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P6M1 |= GPIOx->Pin, P6M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P6M1 |= GPIOx->Pin, P6M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P6M1 &= ~GPIOx->Pin, P6M0 |= GPIOx->Pin; //推挽输出
}
if(GPIO == GPIO_P7)
{
if(GPIOx->Mode == GPIO_PullUp) P7M1 &= ~GPIOx->Pin, P7M0 &= ~GPIOx->Pin; //上拉准双向口
if(GPIOx->Mode == GPIO_HighZ) P7M1 |= GPIOx->Pin, P7M0 &= ~GPIOx->Pin; //浮空输入
if(GPIOx->Mode == GPIO_OUT_OD) P7M1 |= GPIOx->Pin, P7M0 |= GPIOx->Pin; //开漏输出
if(GPIOx->Mode == GPIO_OUT_PP) P7M1 &= ~GPIOx->Pin, P7M0 |= GPIOx->Pin; //推挽输出
}
return SUCCESS; //成功
}
注意STC32G_GPIO.h中包含了头文件config.h及自定义的数据类型符号,需从Independent_Programme文件夹下的子目录下将下面两个头文件Copy到library文件夹下,否则编译会报错。
下面是我自己写的库函数,头文件如下:
/*STC32G_GPIO.h
Designed by Bill Liu
Version 0.0
Modified last by Bill Liu on 06/23/2022
*/
#ifndef __STC32G_GPIO_H
#define __STC32G_GPIO_H
#include <STC32G.h>
#include "config.h"
#include "mtype.h"
//***************************************
typedef enum
{
PIN0 = 0x01,
PIN1 = 0x02,
PIN2 = 0x04,
PIN3 = 0x08,
PIN4 = 0x10,
PIN5 = 0x20,
PIN6 = 0x40,
PIN7 = 0x80
}IOPORT_PIN;
//***************************************
typedef enum
{
SCT_P0 = 0x01, //P0 port
SCT_P1 = 0x02, //P1 port
SCT_P2 = 0x04, //P2 port
SCT_P3 = 0x08, //P3 port
SCT_P4 = 0x10, //P4 port
SCT_P5 = 0x20, //P5 port
SCT_P6 = 0x40, //P6 port
SCT_P7 = 0x80 //P7 port
}STC32G_IOPORT;
//***************************************
typedef enum
{
BI_IO = 0, //bidirectional I/O
PP_OUT, //push_pull out
HI_IN, //high impendence in
ODR_OUT //open drain out
}STC32G_IOMODE;
/****************************************
Function: STC32G_P0PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P0PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P0PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P1PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P1PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P1PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P2PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P2PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P2PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P3PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P3PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P3PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P4PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P4PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P4PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P5PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P5PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P5PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P6PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P6PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P6PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_P7PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_P7PinsInit(PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_P7PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
/****************************************
Function: STC32G_PortsPinsInit(ui8 ports,ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
Return value: void
ports: ports to init
pins: pins to init,
mode: configure work mode
pullUpEnable: 0-pullup disable, 1-pull up enable
pullDownEnable: 0-pull down disable,1-pull down enable
drvEn: 1-drive ability enhance enable, 0-drive ability enhance disable
speedHi; 1- I/O speed high enable, 0- I/O speed high disable
dIEnable: 1- digital singal input enable, 0- digital singal input enable
sTEnable: 1-schmitt trigger enable, 0-schmitt trigger disable
Example:
STC32G_PortsPinsInit(SCT_P0|SCT_P1|SCT_P6,PIN0|PIN3, BI_IO, 0, 0,0,1,1,1);
****************************************/
void STC32G_PortsPinsInit(ui8 ports,ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable);
#endif
库函数源代码如下:
/*STC32G_GPIO.h
Designed by Bill Liu
Version 0.0
Modified last by Bill Liu on 06/23/2022
*/
#include "STC32G_GPIO.h"
//*********************************************************************************************************************************************/
void STC32G_P0PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P0M1 &= ~pins;
P0M0 &= ~pins;
break;
case PP_OUT:
P0M1 &= ~pins;
P0M0 |= pins;
break;
case HI_IN:
P0M1 |= pins;
P0M0 &= pins;
break;
case ODR_OUT:
P0M1 |= pins;
P0M0 |= pins;
break;
}
if(pullUpEnable)
P0PU |= pins;
else
P0PU &= ~pins;
if(pullDownEnable)
P0DR |= pins;
else
P0DR &= ~pins;
if(drvEn)
P0DR &= ~pins;
else
P0DR |= pins;
if(speedHi)
P0SR &= ~pins;
else
P0SR |= pins;
if(dIEnable)
P0IE |= pins;
else
P0IE &= ~pins;
if(sTEnable)
P0NCS &= ~pins;
else
P0NCS |= pins;
}
//End of STC32G_P0PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//*********************************************************************************************************************************************/
void STC32G_P1PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P1M1 &= ~pins;
P1M0 &= ~pins;
break;
case PP_OUT:
P1M1 &= ~pins;
P1M0 |= pins;
break;
case HI_IN:
P1M1 |= pins;
P1M0 &= pins;
break;
case ODR_OUT:
P1M1 |= pins;
P1M0 |= pins;
break;
}
if(pullUpEnable)
P1PU |= pins;
else
P1PU &= ~pins;
if(pullDownEnable)
P1DR |= pins;
else
P1DR &= ~pins;
if(drvEn)
P1DR &= ~pins;
else
P1DR |= pins;
if(speedHi)
P1SR &= ~pins;
else
P1SR |= pins;
if(dIEnable)
P1IE |= pins;
else
P1IE &= ~pins;
if(sTEnable)
P1NCS &= ~pins;
else
P1NCS |= pins;
}
//End of STC32G_P1PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//**********************************************************************************************************************************************/
void STC32G_P2PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P2M1 &= ~pins;
P2M0 &= ~pins;
break;
case PP_OUT:
P2M1 &= ~pins;
P2M0 |= pins;
break;
case HI_IN:
P2M1 |= pins;
P2M0 &= pins;
break;
case ODR_OUT:
P2M1 |= pins;
P2M0 |= pins;
break;
}
if(pullUpEnable)
P2PU |= pins;
else
P2PU &= ~pins;
if(pullDownEnable)
P2DR |= pins;
else
P2DR &= ~pins;
if(drvEn)
P2DR &= ~pins;
else
P2DR |= pins;
if(speedHi)
P2SR &= ~pins;
else
P2SR |= pins;
if(dIEnable)
P2IE |= pins;
else
P2IE &= ~pins;
if(sTEnable)
P2NCS &= ~pins;
else
P2NCS |= pins;
}
//End of STC32G_P2PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//*********************************************************************************************************************************************/
void STC32G_P3PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P3M1 &= ~pins;
P3M0 &= ~pins;
break;
case PP_OUT:
P3M1 &= ~pins;
P3M0 |= pins;
break;
case HI_IN:
P3M1 |= pins;
P3M0 &= pins;
break;
case ODR_OUT:
P3M1 |= pins;
P3M0 |= pins;
break;
}
if(pullUpEnable)
P3PU |= pins;
else
P3PU &= ~pins;
if(pullDownEnable)
P3DR |= pins;
else
P3DR &= ~pins;
if(drvEn)
P3DR &= ~pins;
else
P3DR |= pins;
if(speedHi)
P3SR &= ~pins;
else
P3SR |= pins;
if(dIEnable)
P3IE |= pins;
else
P3IE &= ~pins;
if(sTEnable)
P3NCS &= ~pins;
else
P3NCS |= pins;
}
//End of STC32G_P3PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//**********************************************************************************************************************************************/
void STC32G_P4PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P4M1 &= ~pins;
P4M0 &= ~pins;
break;
case PP_OUT:
P4M1 &= ~pins;
P4M0 |= pins;
break;
case HI_IN:
P4M1 |= pins;
P4M0 &= pins;
break;
case ODR_OUT:
P4M1 |= pins;
P4M0 |= pins;
break;
}
if(pullUpEnable)
P4PU |= pins;
else
P4PU &= ~pins;
if(pullDownEnable)
P4DR |= pins;
else
P4DR &= ~pins;
if(drvEn)
P4DR &= ~pins;
else
P4DR |= pins;
if(speedHi)
P4SR &= ~pins;
else
P4SR |= pins;
if(dIEnable)
P4IE |= pins;
else
P4IE &= ~pins;
if(sTEnable)
P4NCS &= ~pins;
else
P4NCS |= pins;
}
//End of STC32G_P4PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//**********************************************************************************************************************************************/
void STC32G_P5PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P5M1 &= ~pins;
P5M0 &= ~pins;
break;
case PP_OUT:
P5M1 &= ~pins;
P5M0 |= pins;
break;
case HI_IN:
P5M1 |= pins;
P5M0 &= pins;
break;
case ODR_OUT:
P5M1 |= pins;
P5M0 |= pins;
break;
}
if(pullUpEnable)
P5PU |= pins;
else
P5PU &= ~pins;
if(pullDownEnable)
P5DR |= pins;
else
P5DR &= ~pins;
if(drvEn)
P5DR &= ~pins;
else
P5DR |= pins;
if(speedHi)
P5SR &= ~pins;
else
P5SR |= pins;
if(dIEnable)
P5IE |= pins;
else
P5IE &= ~pins;
if(sTEnable)
P5NCS &= ~pins;
else
P5NCS |= pins;
}
//End of STC32G_P5PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//**********************************************************************************************************************************************/
void STC32G_P6PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P6M1 &= ~pins;
P6M0 &= ~pins;
break;
case PP_OUT:
P6M1 &= ~pins;
P6M0 |= pins;
break;
case HI_IN:
P6M1 |= pins;
P6M0 &= pins;
break;
case ODR_OUT:
P6M1 |= pins;
P6M0 |= pins;
break;
}
if(pullUpEnable)
P6PU |= pins;
else
P6PU &= ~pins;
if(pullDownEnable)
P6DR |= pins;
else
P6DR &= ~pins;
if(drvEn)
P6DR &= ~pins;
else
P6DR |= pins;
if(speedHi)
P6SR &= ~pins;
else
P6SR |= pins;
if(dIEnable)
P6IE |= pins;
else
P6IE &= ~pins;
if(sTEnable)
P6NCS &= ~pins;
else
P6NCS |= pins;
}
//End of STC32G_P6PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
//**********************************************************************************************************************************************/
void STC32G_P7PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
SysInit();
switch(mode)
{
case BI_IO:
P7M1 &= ~pins;
P7M0 &= ~pins;
break;
case PP_OUT:
P7M1 &= ~pins;
P7M0 |= pins;
break;
case HI_IN:
P7M1 |= pins;
P7M0 &= pins;
break;
case ODR_OUT:
P7M1 |= pins;
P7M0 |= pins;
break;
}
if(pullUpEnable)
P7PU |= pins;
else
P7PU &= ~pins;
if(pullDownEnable)
P7DR |= pins;
else
P7DR &= ~pins;
if(drvEn)
P7DR &= ~pins;
else
P7DR |= pins;
if(speedHi)
P7SR &= ~pins;
else
P7SR |= pins;
if(dIEnable)
P7IE |= pins;
else
P7IE &= ~pins;
if(sTEnable)
P7NCS &= ~pins;
else
P7NCS |= pins;
}
//End of STC32G_P7PinsInit(ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
/***************************************************************************************************************************************************/
void STC32G_PortsPinsInit(ui8 ports,ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
{
ui8 i;
for(i = 0; i < 8; i++)
{
if(ports & (1 << i))
{
switch(i)
{
case 0:
STC32G_P0PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 1:
STC32G_P1PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 2:
STC32G_P2PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 3:
STC32G_P3PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 4:
STC32G_P4PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 5:
STC32G_P5PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 6:
STC32G_P6PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
case 7:
STC32G_P7PinsInit(pins, mode, pullUpEnable, pullDownEnable,drvEn,speedHi,dIEnable, sTEnable);
break;
}
}
}
}
//End of STC32G_PortsPinsInit(ui8 ports,ui8 pins, STC32G_IOMODE mode, BOOL pullUpEnable, BOOL pullDownEnable,BOOL drvEn,BOOL speedHi,BOOL dIEnable, BOOL sTEnable)
我也将config.h 做了修改,修改后的代码如下:
/*STC32G_GPIO.h
Designed by Bill Liu
Version 0.0
Modified last by Bill Liu on 06/23/2022
*/
#ifndef __CONFIG_H__
#define __CONFIG_H__
#define FOSC 35000000UL
//#define FOSC 24000000UL
//#define FOSC 27000000UL
//#define FOSC 30000000UL
//#define FOSC 33177600UL
//********************************************************
void SysInit(); //init System speed fastest
#endif
config.c的源代码如下:
/*config.c
Designed by Bill Liu
Version 0.0
Modified last by Bill Liu on 06/22/2022
*/
#include <STC32G.h>
#include "config.h"
//********************************************************
void SysInit() //init System speed fastest
{
EAXFR = 1; //visit XFR enable
CKCON = 0x00; //set outer data bus speed fastest
WTST = 0x00; //CPU wait 0 to run program
}
//End of SysInit()
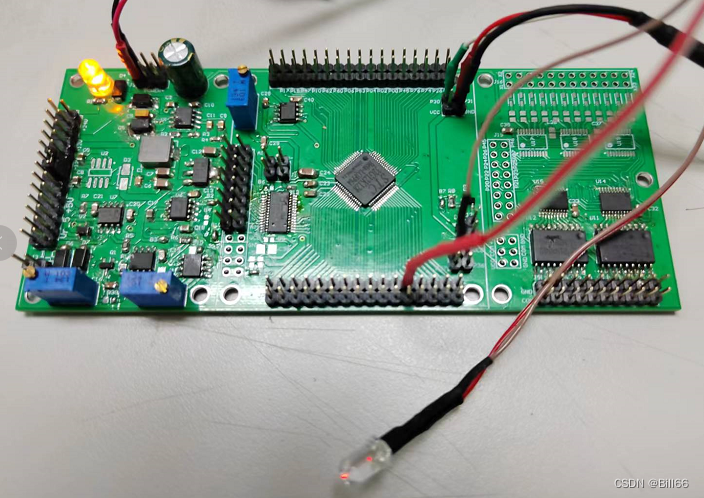
5. I/O配置实例 下面将用我自己写的库函数来演示验证I/O配置。我将以下面这块板来做验证
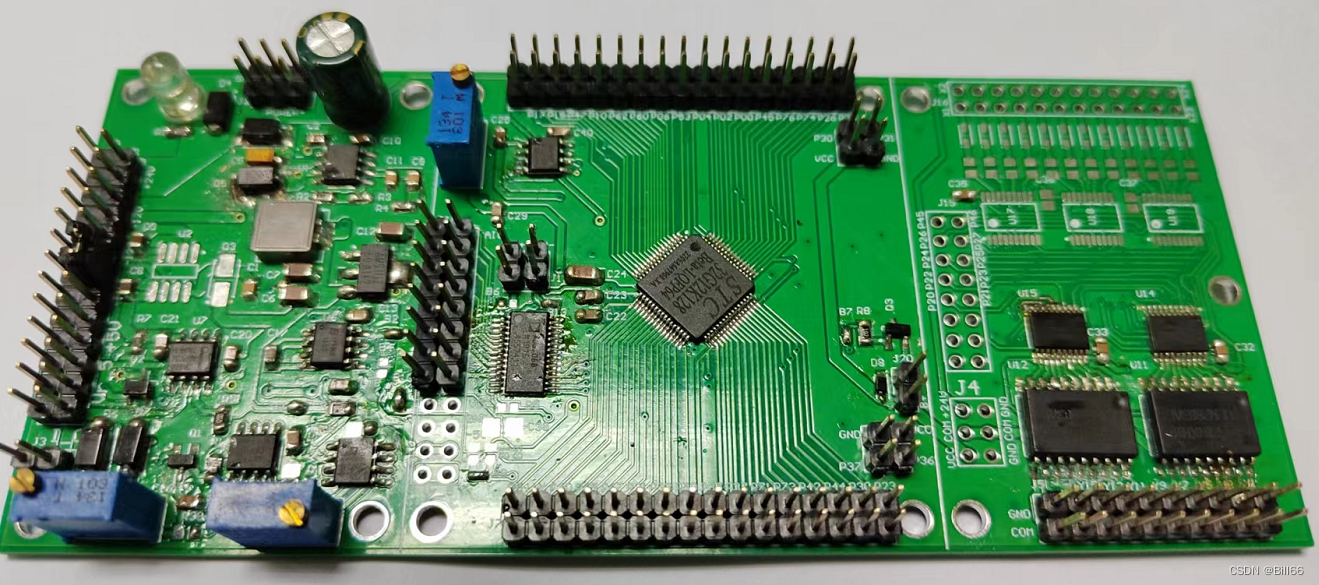
这块板用白线隔开将板分成了三个区域,左边为电源区,中间为模拟采样及MCU区域,右边为逻辑输入输出区。再看一下单片机的型号:
 先编译下面的空程序,将其下载到单片机中,看能否下在成功。
先编译下面的空程序,将其下载到单片机中,看能否下在成功。
/*main.c
Designed by Bill Liu
Version 0.0
Modified last by Bill Liu on 06/22/2022
*/
#include "main.h"
#include "config.h"
void main()
{
}
//End of main()
下载成功,如下:
测一下I/O口的输出电压,随意选一个I/O口测试(实际测试的是P73),测试结果如下。
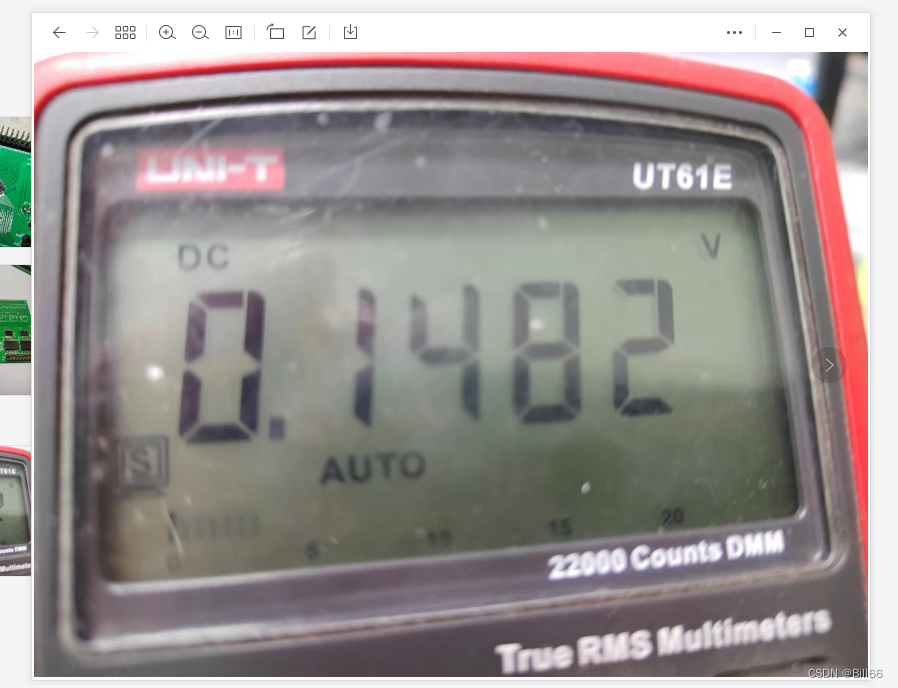
视乎输出了低电平,应该是既不输出高电平也不输出低电平(没电流流入,也没电流流出), 看它能否驱动Led,下面是一个能够正常点亮的LED:

先将接电源端不变,另一端将其 接在与P73连接的排针上,看LED是否任被点亮,结果如下:
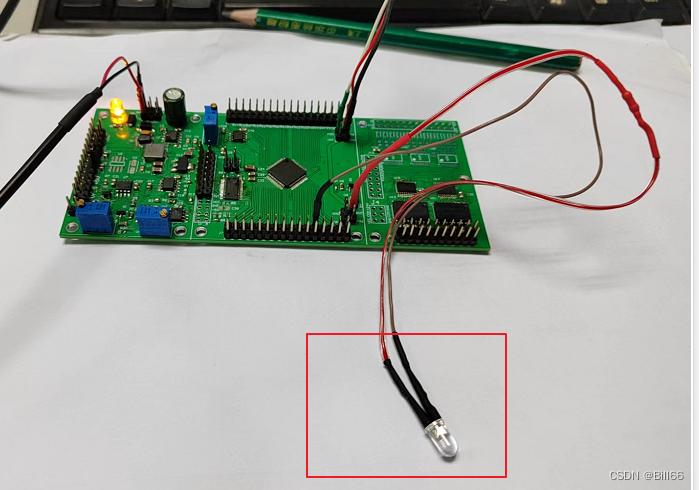
LED未被点亮 说明确实没有电流输入。SCT32G上电复位时I/O口处于高阻输入状态,一方面可以增强抗干扰能力,另一方面可以避免该单片机控制的电路载单片机上电复位时误动作。
在main()函数中插入如下代码:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 0, 0, 0, 0, 0, 0);
P73 = 0;
while(1);
}
//End of main()
编译下载,如果库函数没有问题,LED应该亮起,结果如下:

说明库函数没有错误。将main()函数中的代码修改如下:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 0, 0, 0, 0, 0, 0);
P73 = 1;
while(1);
}
//End of main()
编译下载到单片机,先来测试下双向I/O弱上拉的正向驱动能力。结果如下:
LED仅发出微弱的亮光,说明I/O正向驱动能力弱。现将上拉电阻使能,即库函数的第三个参数设为1,修改main()函数中的代码如下:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 1, 0, 0, 0, 0, 0);
P73 = 1;
while(1);
}
//End of main()
编译下载后的结果如下:
LED变亮,说明正向驱动能力有所增强。现将驱动电流增大,将下面红框中的变量设为1,看下结果如和变化:
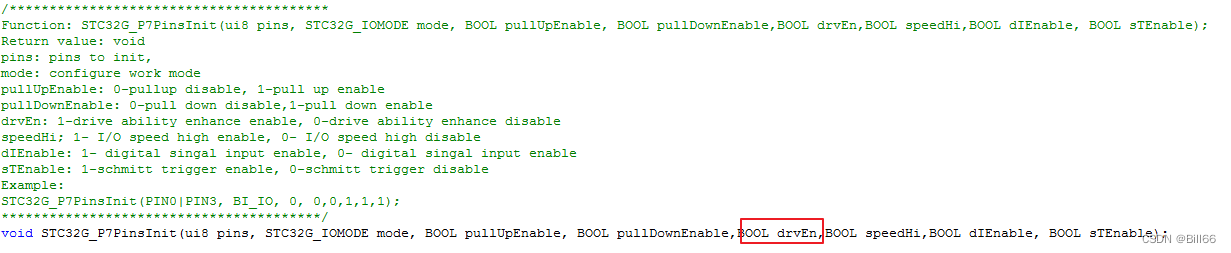
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 0, 0, 1, 0, 0, 0);
P73 = 1;
while(1);
}
//End of main()
编译下载,结果如下:
感觉与双向I/O弱上拉的正向驱动能力差不多。再看一下,打开下拉电阻时双向I/O弱上拉的正向驱动能力。修改main()函数代码如下:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 0, 1, 0, 0, 0, 0);
P73 = 1;
while(1);
}
//End of main()
编译下载到单片机的结果如下:
感觉LED亮度变化并不明显。
STC32G的 I/O 较STC15 的I/O新增新的功能与寄存器,从上面的测试可以看出,I/O的负向驱动能力较强(可承受较大的灌电流),正向驱动能力弱,如果要使I/O口有较大的正向驱动能力,需将其设置为推挽模式,如果设置为双向I/O,需使能上拉电阻才能使其正向驱动能力有所提升,使能PxDR对提供双向I/O的正向驱动能力并不明显,可能仅是对提高I/O的电平转换速度有用。
下面再测试一下I/O的读写,将main()函数的代码修改如下:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 1, 0, 1, 0, 1, 0);
P73 = 1;
STC32G_P0PinsInit(0xFF, BI_IO, 0, 0, 0, 0, 1, 1); //init to bidirectional I/O, pull up disable, pull down disable , dive ability enhance disable,
//high speed disable, digital singal input enable, schmitt trigger enable
STC32G_P2PinsInit(0xFF, BI_IO, 0, 0, 0, 0, 1, 1);
P0 = 0xA0;
P2 = 0xFF;
while(1)
{
if(P2==P0)
P73 = 1;
else
P73 = 0;
}
}
//End of main()
编译下载后的结果如下:
LED为P73正向驱动,LED亮,说明P2、P0正常读取数据。现将将main()函数的代码修改如下:
void main()
{
STC32G_P7PinsInit(PIN3, BI_IO, 1, 0, 1, 0, 1, 0);
P73 = 1;
STC32G_P0PinsInit(0xFF, BI_IO, 0, 0, 0, 0, 1, 1); //init to bidirectional I/O, pull up disable, pull down disable , dive ability enhance disable,
//high speed disable, digital singal input enable, schmitt trigger enable
STC32G_P2PinsInit(0xFF, BI_IO, 0, 0, 0, 0, 1, 0);
P0 = 0xA0;
P2 = 0xFF;
while(1)
{
if(P2==P0)
P73 = 1;
else
P73 = 0;
}
}
//End of main()
编译下载结果如下:
说明即使不使能施密特触发器,依然可以读取数据。