一、终端
- 一个窗口可打开多个终端,实现分屏,ROS操作更整洁。
- 安装
sudo apt install terminator
Alt+Up //移动到上面的终端
Alt+Down //移动到下面的终端
Alt+Left //移动到左边的终端
Alt+Right //移动到右边的终端
Ctrl+Shift+O //水平分割终端
Ctrl+Shift+E //垂直分割终端
Ctrl+Shift+Right //在垂直分割的终端中将分割条向右移动
Ctrl+Shift+Left //在垂直分割的终端中将分割条向左移动
Ctrl+Shift+Up //在水平分割的终端中将分割条向上移动
Ctrl+Shift+Down //在水平分割的终端中将分割条向下移动
Ctrl+Shift+S //隐藏/显示滚动条
Ctrl+Shift+F //搜索
Ctrl+Shift+C //复制选中的内容到剪贴板
Ctrl+Shift+V //粘贴剪贴板的内容到此处
Ctrl+Shift+W //关闭当前终端
Ctrl+Shift+Q //退出当前窗口,当前窗口的所有终端都将被关闭
Ctrl+Shift+X //最大化显示当前终端
Ctrl+Shift+Z //最大化显示当前终端并使字体放大
Ctrl+Shift+N or Ctrl+Tab //移动到下一个终端
Ctrl+Shift+P or Ctrl+Shift+Tab //Crtl+Shift+Tab 移动到之前的一个终端
二、vscode安装
因为国内做的比较好的自动驾驶的百度用的vscode IDE开发的。
1. 安装 vscode(2种方式)
(1)官网下载 linux - .deb - 64bit
sudo dpkg -i xxx.deb
(2)ubuntu software -->搜索code,并install
2. 卸载 vscode
sudo dpkg --purge code
3. 将vscode添加到右侧的收藏夹
点击屏幕右下角9个小圆点 -->顶端搜索code–>右键Add to Favorites(添加到收藏夹)
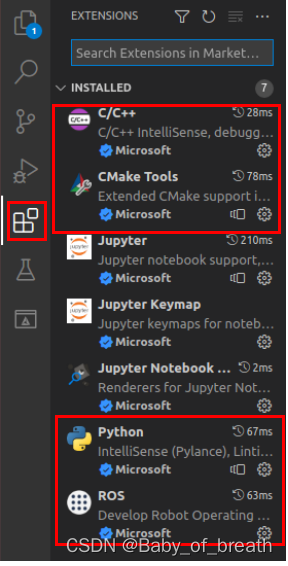
4.安装插件
点击vscode右侧的extensions–>搜索插件(c++,CMake Tools,Python,ROS)
三、vscode使用
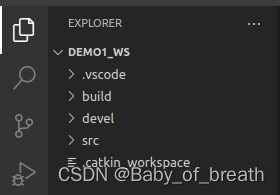
1.创建工作空间
mkdir -p ~/demo1_ws/src
cd ~/demo1_ws
catkin_make
2. 启动vscode
cd ~/demo1_ws
code与.之间有个空格
code .
打开vscode后,在当前目录下
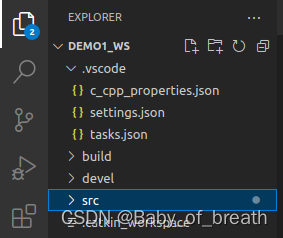
3.配置编译
快捷键 ctrl + shift + B 调用编译,选择:catkin_make:build -->点击后面的设置(小齿轮)
- 方式一:替换
.vscode/tasks.json 文件为以下内容
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
"group": {"kind":"build","isDefault":true},
配置后,按快捷键ctrl + shift + b,编译整个工作空间
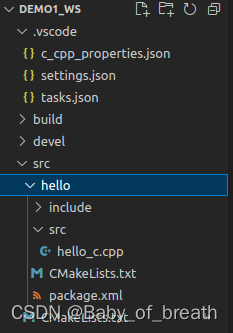
5.创建功能包
vscode中,在~/demo1_ws下的src右键 -->最下方Create Catkin Package -->在上方弹出的提示框中依次输入:
- 功能包名
hello
- 依赖
rospy roscpp std_msgs
为了避免依赖打字输入错误,ctrl + shift + b编译,查看是否出错。
6 c++终端输出字符串
6. 1 创建c++源文件
(1)~/demo1_ws/src/hello下的src文件夹,右键New File -->输入文件名hello_c.cpp
(2)编写hello_c.cpp文件
- 输入
main -->如下提示,选择前面是黑框的。会自动生成main()

- 删除形参中
char const *argv[]中的关键字const

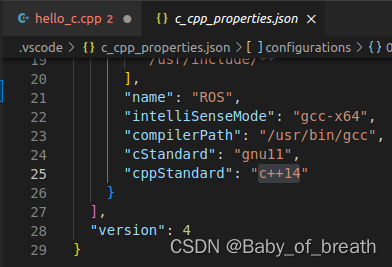
- 没有自动补全,需要设置
修改~/demo1_ws/.vscode中的c_cpp_properties.json文件
第25行,将cppStandard的值改为c++17。就会有代码提示
6.2 配置CMakeLists.txt文件
注意:修改hello功能包下的CMakeLists.txt文件。而不是~/demo1_ws/src下面的CMakeLists.txt文件。
(1)修改add_executable()
-
ctrl + / 取消注释
-
add_executable(可执行文件名 src/.cpp文件名)
可执行文件名:自己可随意命名,通常和.cpp文件去除后缀名称一致。
add_executable(hello_c src/hello_c.cpp)
(2)修改target_link_libraries()
- 选中多行,
ctrl + / 取消注释
- 只需把
可执行文件名填写到第一个参数
target_link_libraries(hello_c
${catkin_LIBRARIES}
)
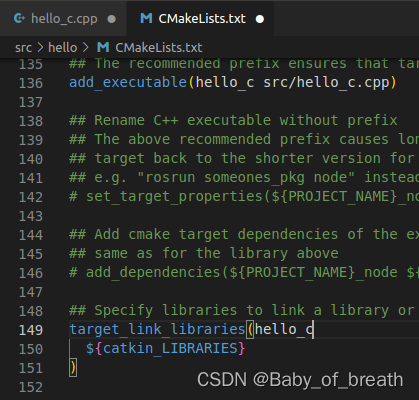
(3)配置完毕,ctrl + shift + b编译,如果不报错,配置成功。
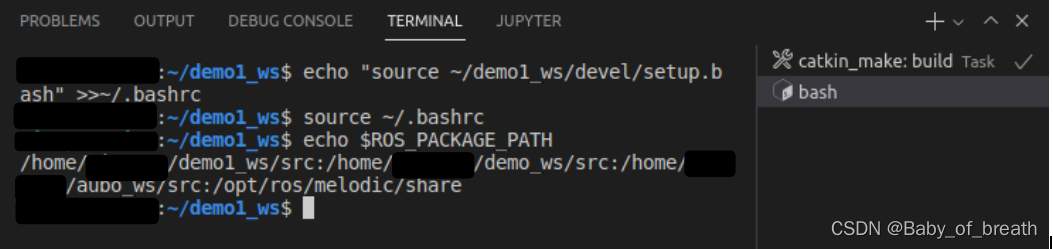
6.3 配置工作空间的环境变量
点击终端右侧的+,打开一个在~/demo1_ws目录下的bash终端


- 将
~/demo1_ws工作空间的环境变量写入.bashrc文件中
echo "source ~/demo1_ws/devel/setup.bash" >>~/.bashrc
source ~/.bashrc
- 检查ROS的环境变量中是否有
~/demo1_ws工作空间的环境变量
echo $ROS_PACKAGE_PATH
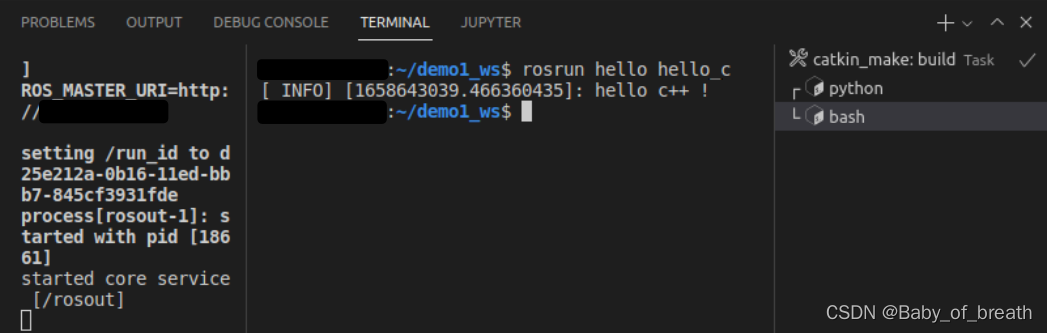
6.4 执行ROS节点
(1)bash终端输入:roscore
(2)bash终端输入:rosrun hello hello_c (rosrun 功能包名 可执行文件名)
四、vscode的快捷键
ctrl + shift + k //删掉选中的代码(一行、多行)
ctrl + / //添加、消除选中文本的注释(一行、多行)。不限语言!!!
ctrl + shift + b //编译 (写完源文件、修改完配置文件后,检查写的是否有错误)