武汉大学VaST 课题组的王昱升博士最近分享了他们在轨道交通场景下利用Livox 激光雷达进行建图,并基于高精度反射率对点云图进行色彩优化,辅助轨道交通语义地图构建的工作。
实测场景及点云图
项目组计划通过自研SLAM算法针对大场景铁路环境进行地图构建,并结合自动化的电力杆塔、铁轨及轨旁信号机提取方法,达到构建铁路环境语义地图的目的。但在实际实验中,会出现特征未提取或错误提取(如将立式信号机提取为电力杆塔)的情况,需要人工结合点云地图进行手动筛查。由于轨道线路长、点云数据量大等特点,为保证高效准确的人工筛查工作,良好的点云可视化效果必不可少。
为选取能直观展示的可视化测试结果,项目组选取某货运保养工区进行了语义地图构建及人工筛查工作。通过自研的Rail-SLAM算法,结合多个Livox激光雷达对场景进行重建,并自动化生成语义地图。

图1 实测货运铁路保养工区图示

图2 项目组自研七雷达轨道车高精地图采集设备(5个Livox Horizon,2个Livox Tele-15)
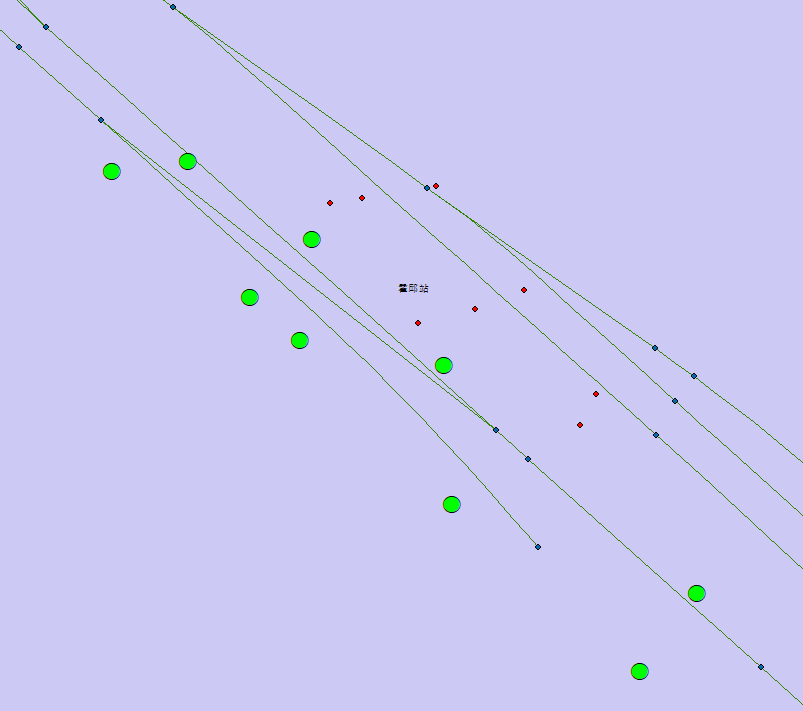
图3 通过自研算法生成的语义地图;其中绿色线为铁轨中心线,大绿点为电力杆塔,小点为完成各种任务的轨旁信号机
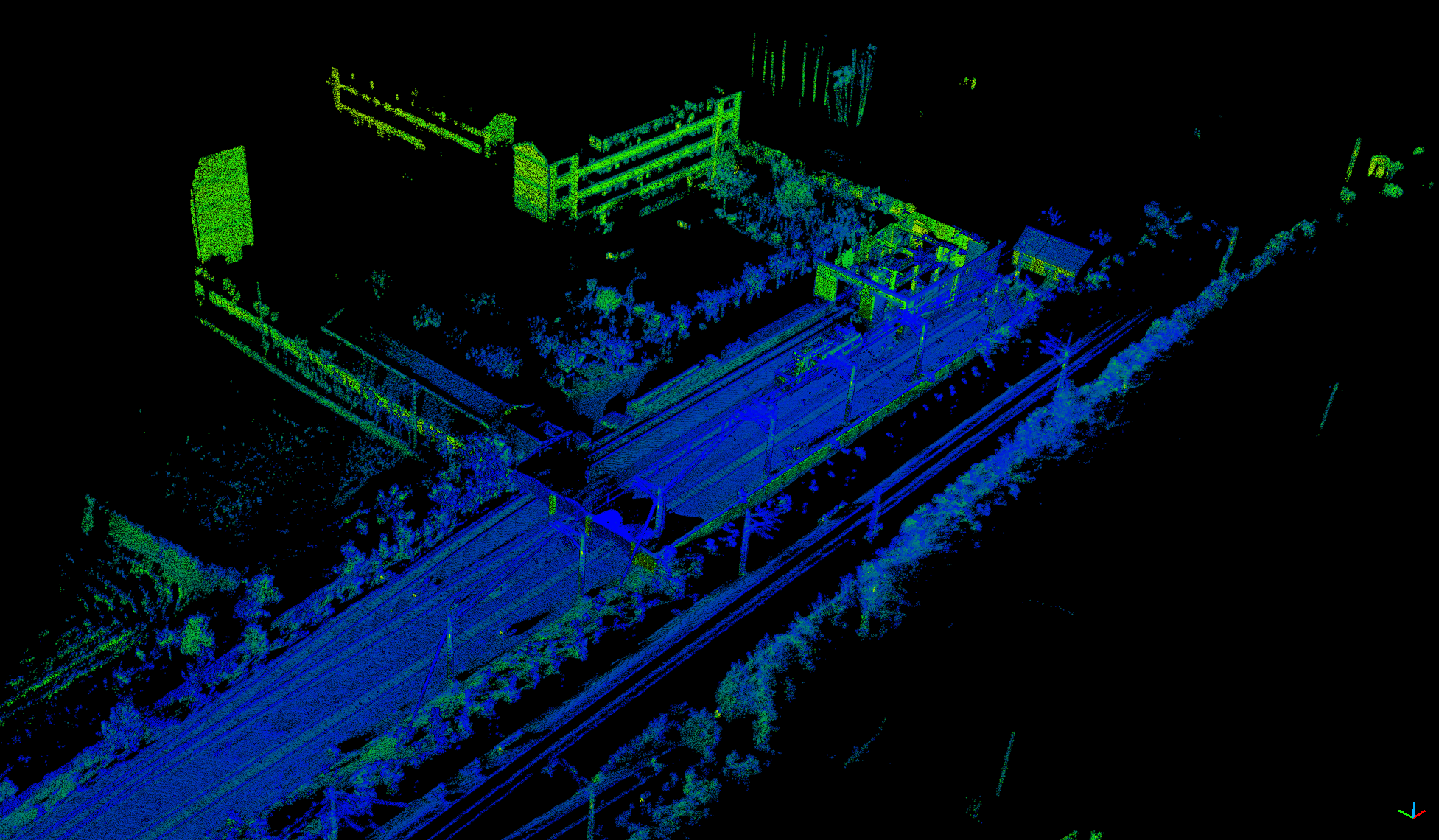
图4.1 Livox Viewer 默认分辨率输出效果
从上图可看出,得益于Livox 激光雷达的高精度分辨率,利用默认反射率信息输出就已经可以清晰分辨铁轨、枕木等