一、安装Robotics System Toolbox


二、弄懂左乘和右乘
介绍的第一个函数为欧拉-齐次矩阵
%左手坐标系下,中指对着自己为x轴,z轴为拇指
T0=eul2tr(0,0,0) %基坐标系
Tx=transl(5,0,0) %xyz
Ty=transl(0,5,0) %xyz
Tz=transl(0,0,5) %xyz
trplot(T0) %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
pause(2);
hold on
trplot(Tx,'color','r')
trplot(Ty,'color','g')
trplot(Tz,'color','b')
xlim([-10 10]);
ylim([-10 10]);
zlim([-10 10]);
具体效果如下:

介绍的第二个函数为旋转矩阵
T0=eul2tr(0,0,0) %基坐标系
figure
subplot(221)
trplot(T0) %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
Rx=rpy2tr(90,0,0)%90度
Ry=rpy2tr(0,90,00)%90度
Rz=rpy2tr(0,0,90)%90度
subplot(222)
trplot(Rx,'color','r')
title('Rx=rpy2tr(90,0,0)%90度')
subplot(223)
trplot(Ry,'color','g')
title('Ry=rpy2tr(0,90,00)%90度')
subplot(224)
trplot(Rz,'color','b')
title('Rz=rpy2tr(0,0,90)%90度')
具体效果如下:

下面分析左乘和右乘的区别:
T0=eul2tr(0,0,0) %基坐标系
Tx=transl(5,0,0) %xyz
Ty=transl(0,5,0) %xyz
Tz=transl(0,0,5) %xyz
Rx=rpy2tr(90,0,0)%90度
Ry=rpy2tr(0,90,00)%90度
Rz=rpy2tr(0,0,90)%90度
subplot(221)
trplot(T0,'color','g') %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
title('基坐标系')
xlim([-10 10]);
ylim([-10 10]);
zlim([-10 10]);
grid on
subplot(222)
hold on
trplot(T0,'color','g')
trplot(Rz*Tx,'color','r')
title('Rz*Tx')
xlim([-10 10]);
ylim([-10 10]);
zlim([-10 10]);
grid on
hold off
subplot(223)
hold on
trplot(T0,'color','g')
trplot(Tx*Rx,'color','r')
title('Tx*Rx')
xlim([-10 10]);
ylim([-10 10]);
zlim([-10 10]);
grid on
hold off
subplot(224)
hold on
trplot(T0,'color','g')
trplot(Rz*Rx,'color','r')
title('Rz*Rx')
xlim([-2 2]);
ylim([-2 2]);
zlim([-2 2]);
grid on
hold off

图2是先旋转,后平移,图3是先平移,后旋转,图4是先绕Z,后绕X,都是基于自身坐标系做的变换。
下面会得出一个结论:依次左乘是相对于基坐标系的变换,右乘是相互对于自身坐标系的变换。因此,我们想要得到一个,先绕基坐标系Z旋转30°,再延基坐标系X轴平移50,再沿着自身X平移50,就可以表示为:
T0=eul2tr(0,0,0) %基坐标系
trplot(T0,'color','g') %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
hold on
trplot(transl(5,0,0)*rpy2tr(0,0,30),'color','r') %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
trplot(transl(5,0,0)*rpy2tr(0,0,30)*transl(3,0,0),'color','r') %左手坐标系下,中指对着自己为x轴,z轴为拇指,作为初始坐标系
xlim([-10 10]);
ylim([-10 10]);
zlim([-10 10]);
title("transl(5,0,0)*rpy2tr(0,0,30)*transl(3,0,0)");

三、坐标变换方式
首先介绍X-Y-Z固定角坐标系,为什么叫固定角坐标系?“固定”指的是旋转是绕着固定的参考系的各个主轴,比如:
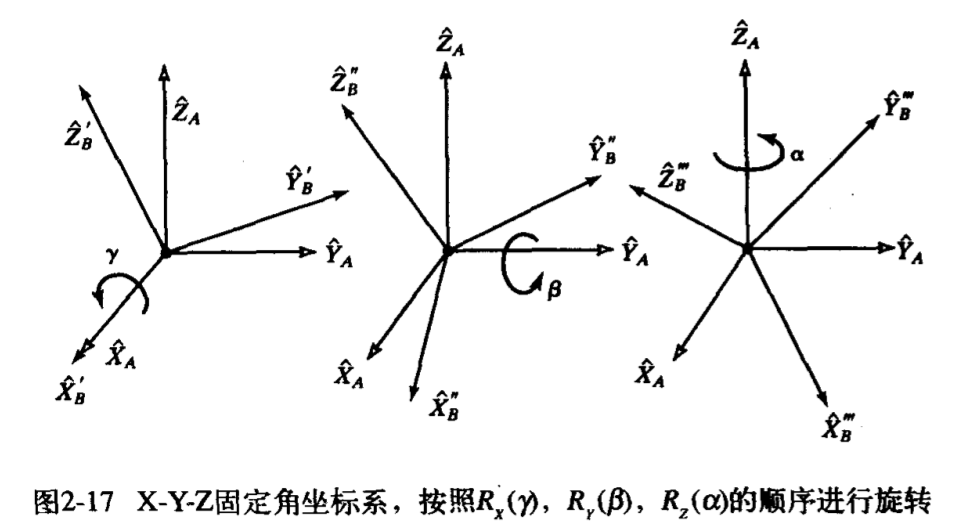
我们对{B}进行旋转,每次都是绕着固定坐标系{A}的轴进行旋转的,我们常将绕着X、Y、Z的旋转称为pitch、yaw、roll,也即俯仰、偏航、翻滚。将三次旋转利用旋转矩阵写出并相乘:
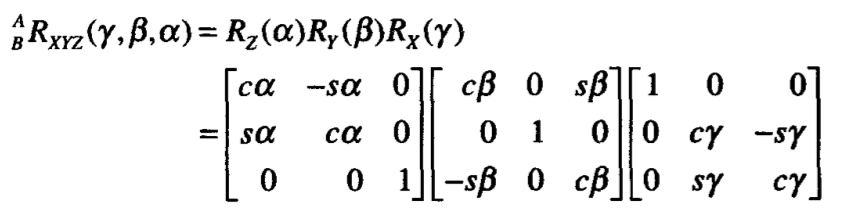
乘积为:

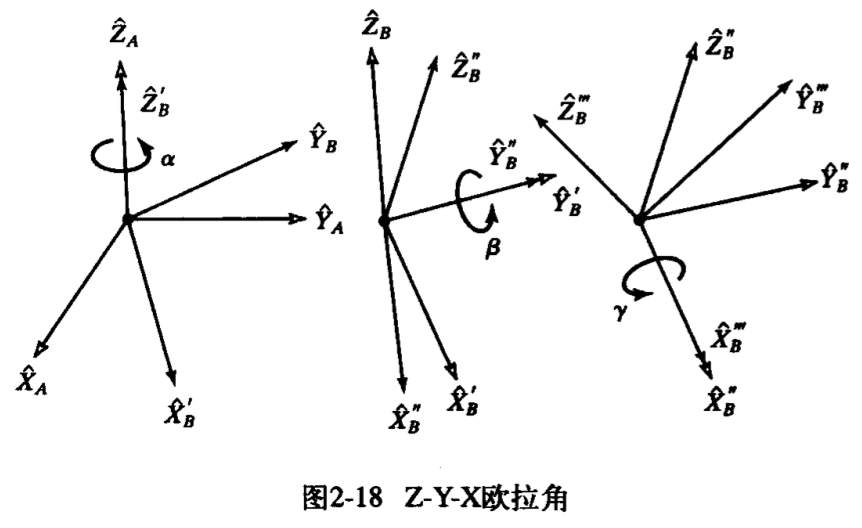
接着我们介绍Z-Y-X欧拉角坐标系,在这种表示法中,我们每次旋转都是绕着{B}的主轴进行旋转,也就是说,并不是绕着固定坐标系{A}的轴进行旋转了:
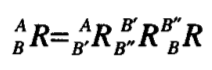
在这种表示下,有:
关于这个式子应该怎么理解呢?我们最终的目标是求出{B}相对于{A}的旋转,对于固定角坐标系,每次旋转都是基于{A}的,因而是按照旋转次序,依次左乘;对于欧拉角则是利用中间坐标系变换,所以依次右乘。比如上面的Z-Y-X欧拉角,记{A}绕{A}的Z旋转得到{B'},然后{B'}绕{B'}的Y旋转得到{B''},最后{B''}绕{B''}的X旋转得到{B},所以,我们可以写出:
式中的3个旋转角分别是绕着{A}的Z轴,{B'}的Y轴,{B‘’}的X轴旋转(所以相对于我们的旋转,是右乘,先乘以绕X的旋转,再乘以绕Y的旋转,最后才是绕Z的旋转),因此我们可以得出结论:X-Y-Z固定角与Z-Y-X欧拉角在同样的角度大小下,旋转所得到的最终结果是一样的,也就是说在这两种表示下,{B}相对于{A}的姿态一致。注意,这并不是巧合,是因为固定角表示下是基本旋转矩阵左乘,而欧拉角表示下是基本旋转矩阵的右乘,而恰好X-Y-Z与Z-Y-X是相反的旋转顺序,所以最终的效果就一样了。
然后介绍一下等效轴角坐标表示法,也即用一个单位矢量加上一个旋转角表示旋转:
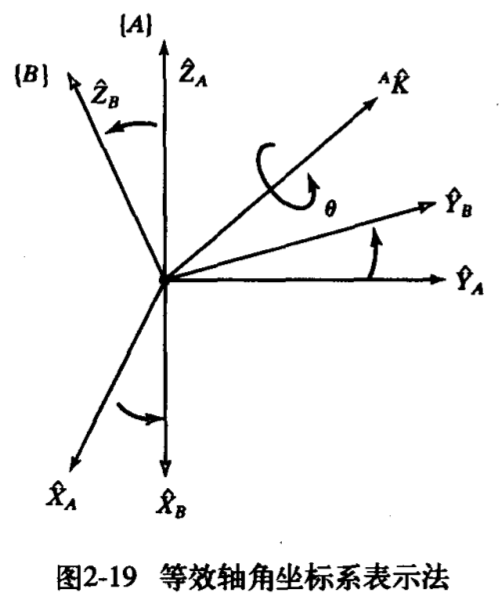
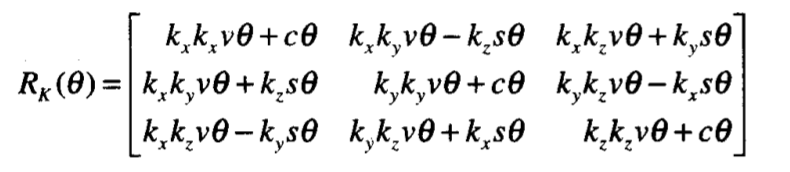
因为我们的单位矢量长度恒为1,所以实际上确定它只需要两个参数,加上旋转角,也即三个参数,正好确定旋转所需要的3个自由度。当旋转轴K为一般轴时,等效旋转矩阵为:
除了上面的固定角坐标系表示法、欧拉角表示法和等效轴角坐标系表示法之外,我们再介绍另一种姿态表示法,这种表示法通过四个数值来表示,称为欧拉参数。
由等效旋转轴和等效旋转角定义的欧拉参数为:

我们将这四个变量平方相加,得到:
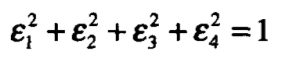
也即,这四个参数不是独立的,所以,仍然符合我们对于姿态的3自由度的认知。同时,由上面的式子可知,我们可以将一个姿态看作是四维空间中单位超球面上的一点,或者说,它是一个单位四元数。用这组参数表示的旋转矩阵为:
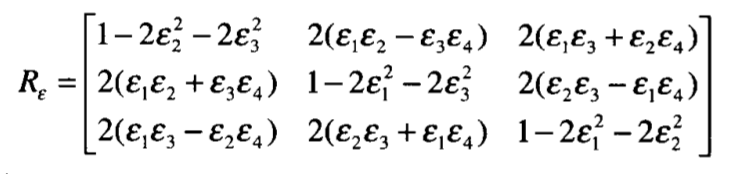
已知旋转矩阵求欧拉参数为:
