stm32项目平衡车详解(stm32F407)下
本文章学习借鉴于创客学院团队,以表感谢。教学视频
B站学习地址
HC-SRO4 超声波测距避障功能开发
TSL1401 CCD摄像头实现小车巡线功能
小车通信功能分析及ESP32模块介绍
oled 显示置入屏幕显示小车状态
前言
前面我们已经实现了平衡小车的直立环,平衡环,转向环,下面我们将实现小车平衡小车蔽障与巡线功能的开发。如下如所示:
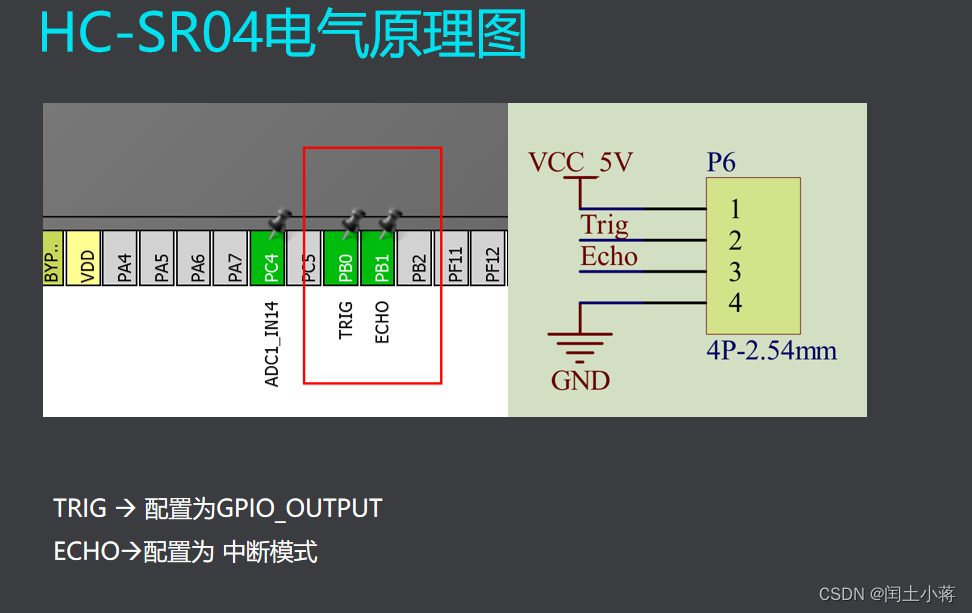
一、HC-SRO4 超声波测距避障功能开发
HC-SRO4超声波测距模块?
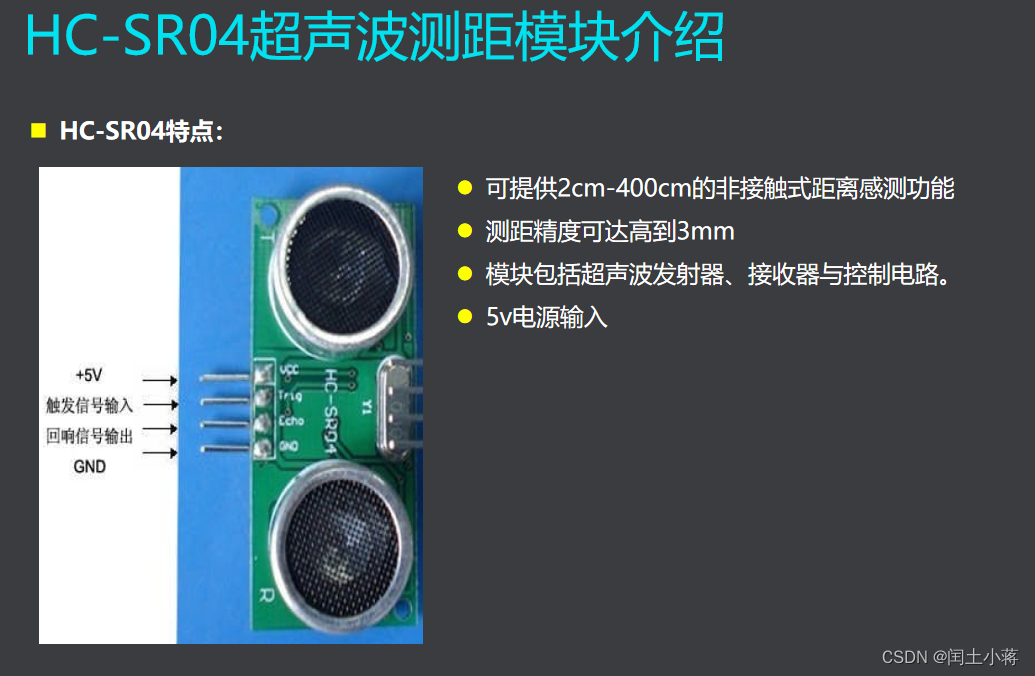
HC- SR04是一种超声波接近传感器,可以告诉您物体是否在它前面,并且还提供传感器和物体之间的距离。这些传感能力使其特别适用于需要知道远离物体或障碍物的机器人,例如墙壁或不应撞击的家具。
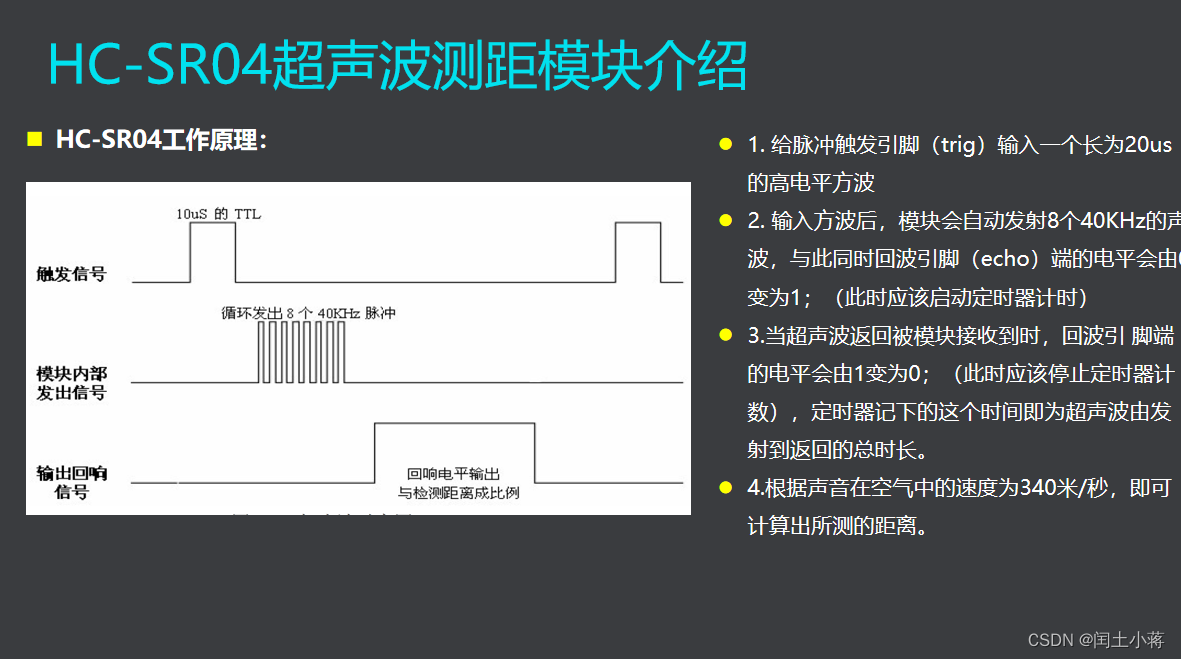
点击查看,HC-SR04超声波传感器原理
超声波测距避障功能开发
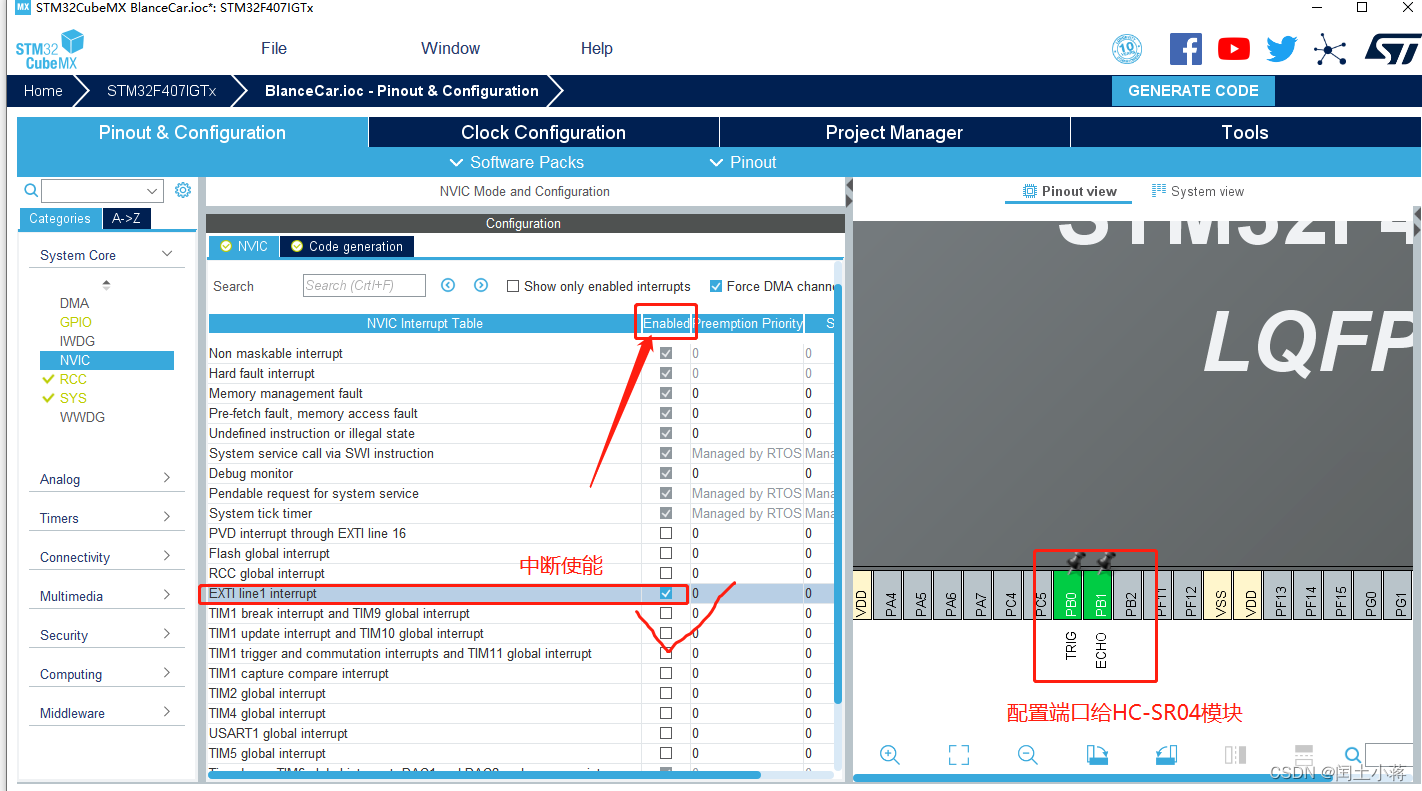
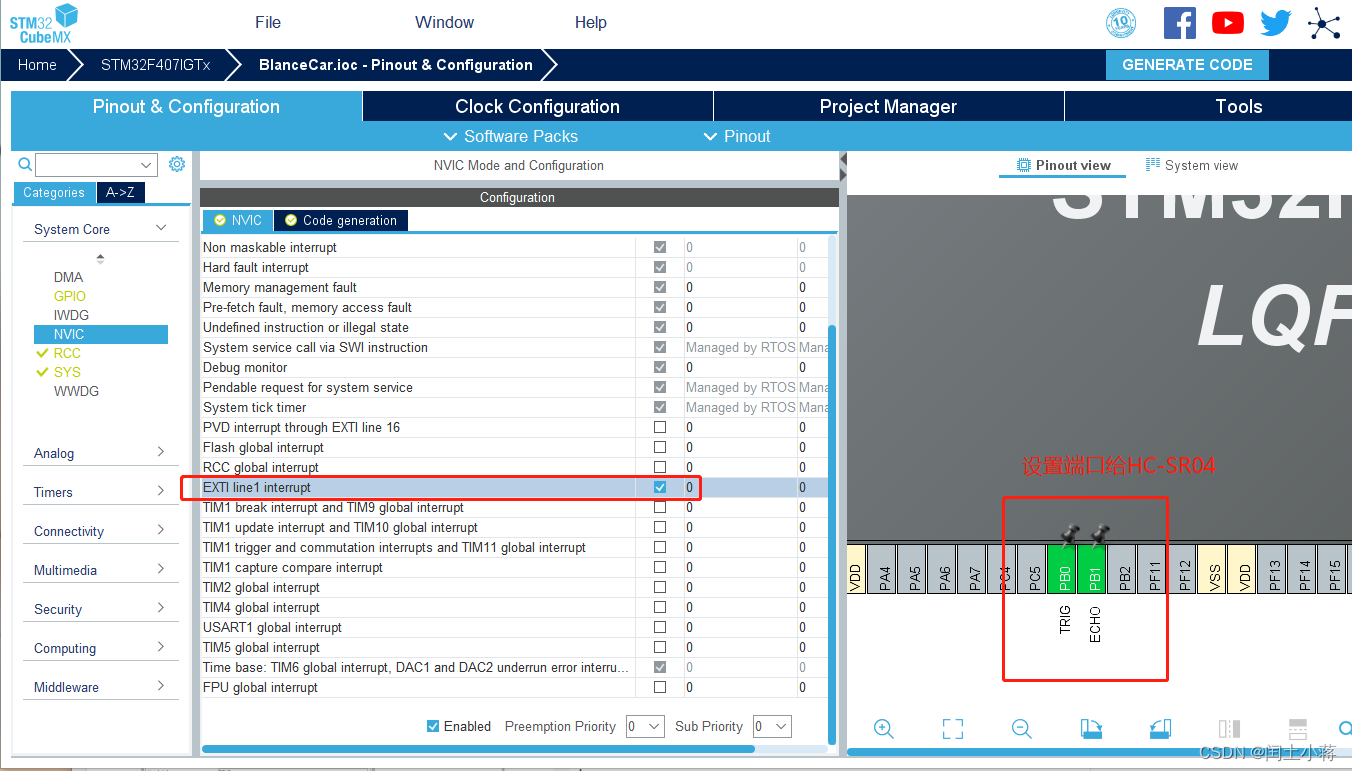
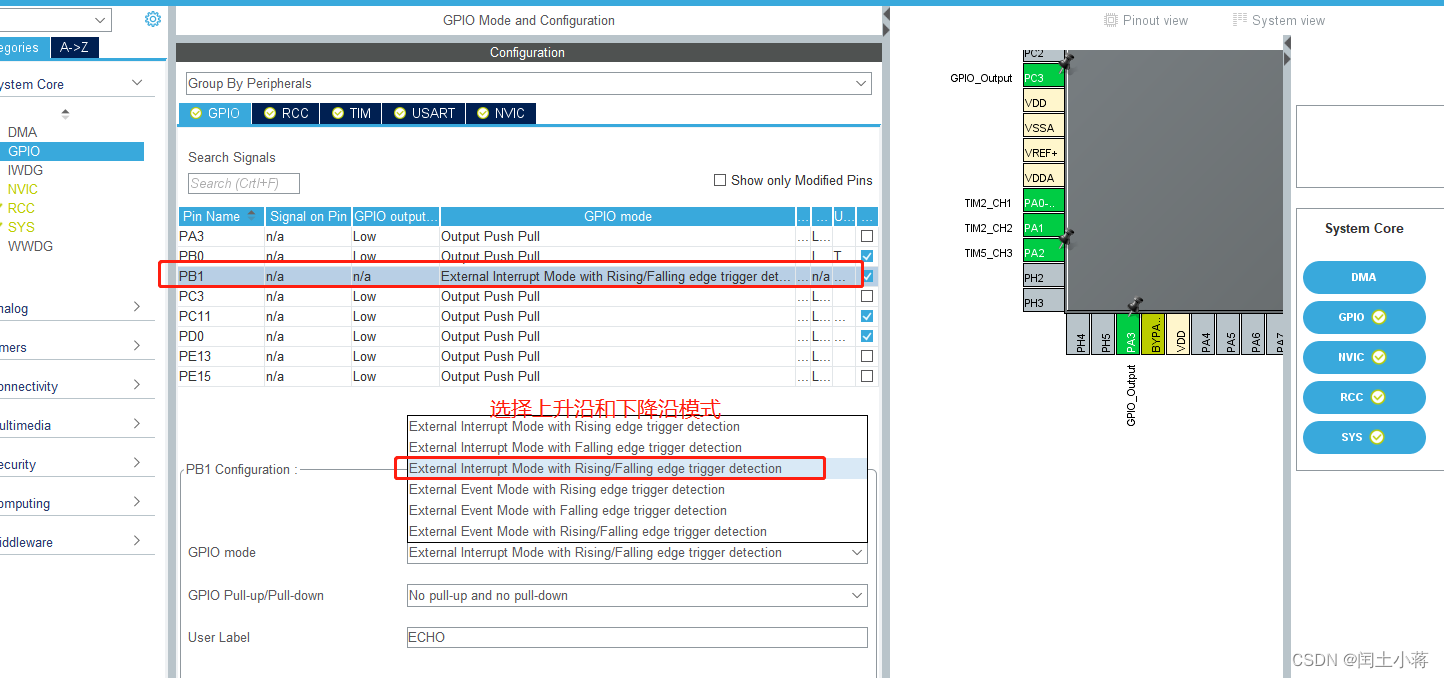
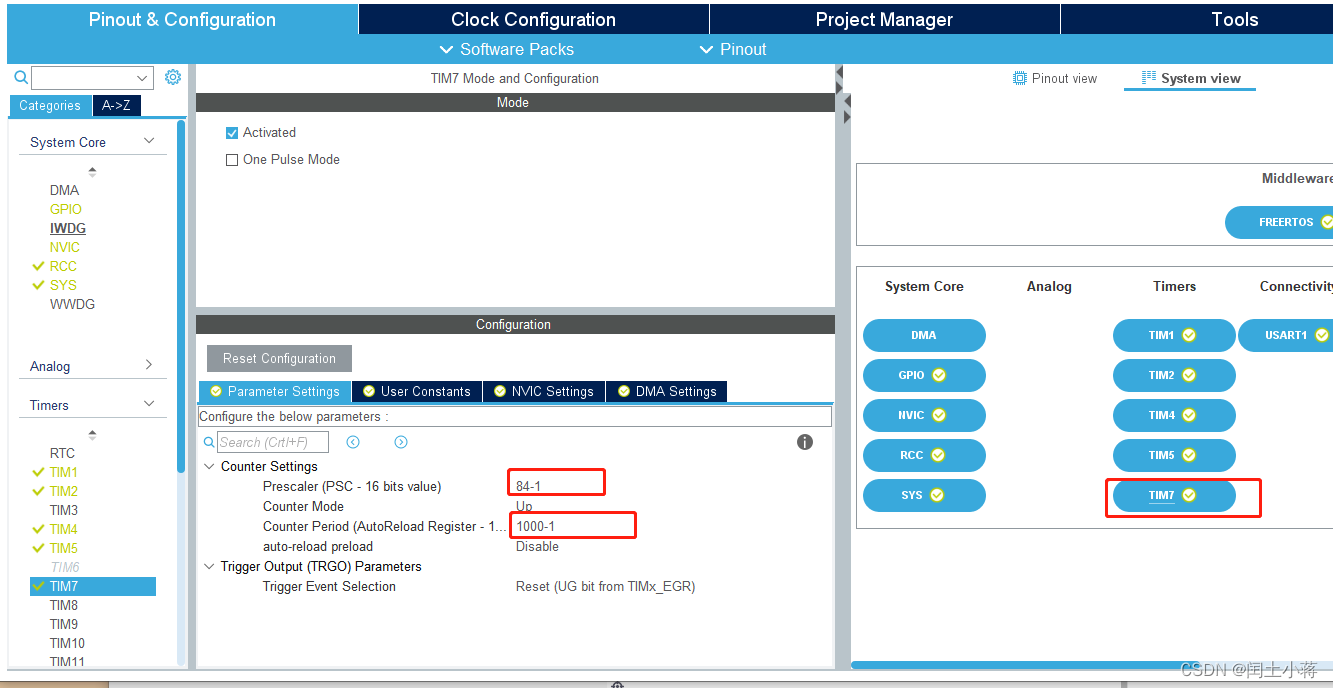
cube 搭建工程项目
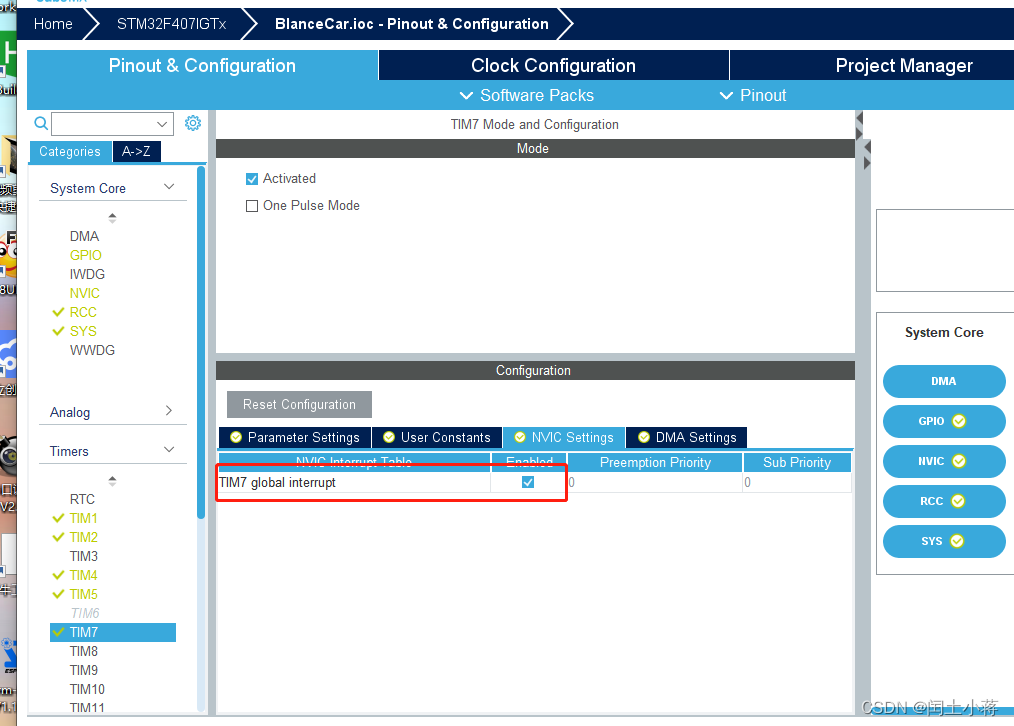
下面给中断使能
启动定时器TIM7 去计时
避障模式开发
避障模式原理就是通过超声波加测距离,通过转向来躲避障碍物。所以我们会用转向环来控制小车转向。
//启动超声波,检测距离
//启动超声波检测函数
void HC_SRC04_Start(void)
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0, GPIO_PIN_SET); //设置高电平启动
delay_us(20);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_0, GPIO_PIN_RESET); //设置高低平启动
}
调用定时器中毒阿女函数进行计数,利用声音传播速度和接收时间测算距离
/**
* @brief This function handles TIM7 global interrupt.
*/
void TIM7_IRQHandler(void)
{
/* USER CODE BEGIN TIM7_IRQn 0 */
/* USER CODE END TIM7_IRQn 0 */
HAL_TIM_IRQHandler(&htim7);
/* USER CODE BEGIN TIM7_IRQn 1 */
/* USER CODE END TIM7_IRQn 1 */
}
/* USER CODE BEGIN 1 */
uint8_t ECHO_IRQ_FLAG = 0;
uint8_t time_cnt = 0; //参数二,溢出次数
static uint8_t last_distence =0;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
int time = 0;
if(GPIO_Pin == GPIO_PIN_1)
{
if(ECHO_IRQ_FLAG == 0) //上升沿中断
{
ECHO_IRQ_FLAG=1;
HAL_TIM_Base_Start_IT(&htim7); //开启定时器,开始计时
}else{
ECHO_IRQ_FLAG = 0; //下降沿中断
HAL_TIM_Base_Stop_IT(&htim7);//关闭定时器,计时结束
time = time_cnt*1000 + TIM7->CNT / 2; //统计声(单次)音返回时间
Distence = 340*100* time /1000000; //微妙转化为秒
if(Distence == 0) Distence = last_distence;
else last_distence = Distence;
}
}
}
配合pid 控制函数,使用超声波测距的距离,进行避障,小车达到避障距离就开始转弯避障,(避障距离建议超过小车直径即可)
int Balance_Pwm,Vertical_Pwm,Trun_Pwm;
int Motor1,Motor2;
int Encoder_left,Encoder_right;
float Movement = 0; //目标速度
int CCD; //目标角度
int FS_MODE; //0 遥控模式1,避障模式 2巡线模式
int Distence; //检测小车与障碍物的距离
//PID控制任务
void Car_Task_100HZ(void)
{
//启动超声波检测模式
HC_SRC04_Start();
//1、确定直立环的PWM
Balance_Pwm = Vertical_Ring_PD(OutMpu.pitch,OutMpu.gyro_x); //*形参:(float Angle):x轴的角度/(float Gyro):x轴的角速度
//2、确定速度环的PWM
Encoder_left = Read_Encoder(1); //左轮
Encoder_right = -Read_Encoder(2); //右轮
Vertical_Pwm = Vertical_speed_PI(Encoder_left,Encoder_right,OutMpu.pitch,Movement);
//3、确定方向环的PWM
if(FS_MODE == 0) //遥控模式
Trun_Pwm = Vertical_turn_PD(CCD,OutMpu.yaw);
else if(FS_MODE == 1) //避障模式
{
if(Distence < 20) //直线距离在20cm 直接转向 20度
Trun_Pwm = Vertical_turn_PD(20,OutMpu.yaw); //直接转向 20度
else
Trun_Pwm = 0; //直行
}
else if(FS_MODE == 2) //巡线模式
{
}
//4、确定最终电机的左右pwm
Motor1 = Balance_Pwm+Vertical_Pwm+Trun_Pwm;
Motor2 = Balance_Pwm+Vertical_Pwm-Trun_Pwm;
PWM_Limiting((int) Motor1,(int) Motor2);
//4、设置电机
Set_PWM(Motor1,Motor2); //*形参;(int motor1):电机1对应的PWM值/(int motor2):电机2对应的PWM值
}
}
二、TSL1401 CCD摄像头实现小车巡线功能
巡线就是小车按照轨迹进行一定的运动,我们通过设计头模块进项轨迹实施采集分析调整车辆运动方向。

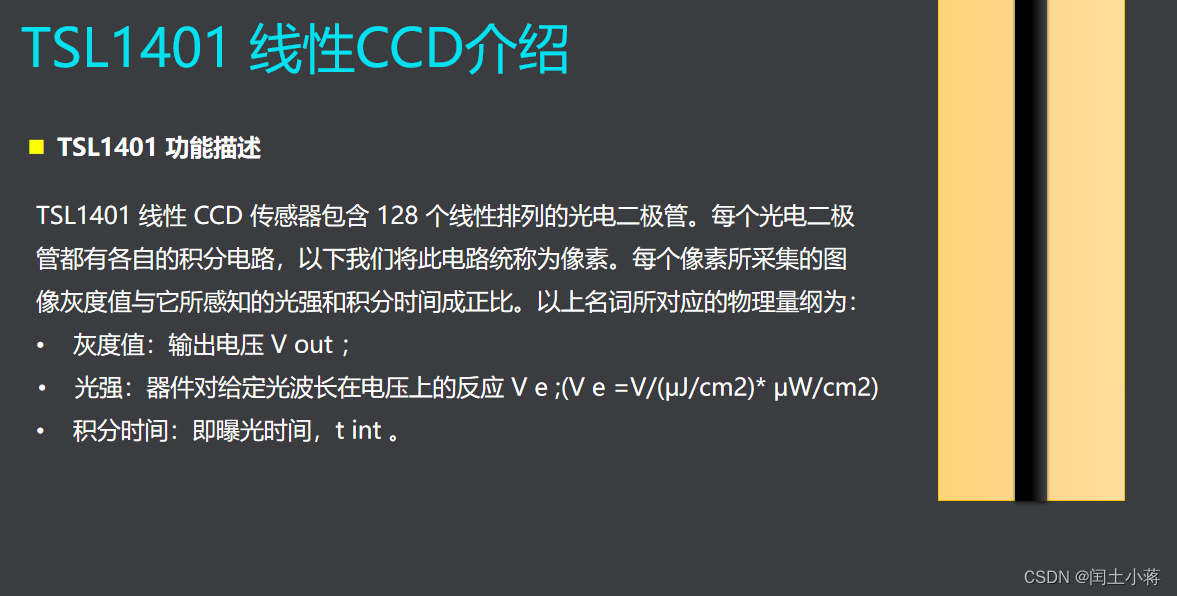
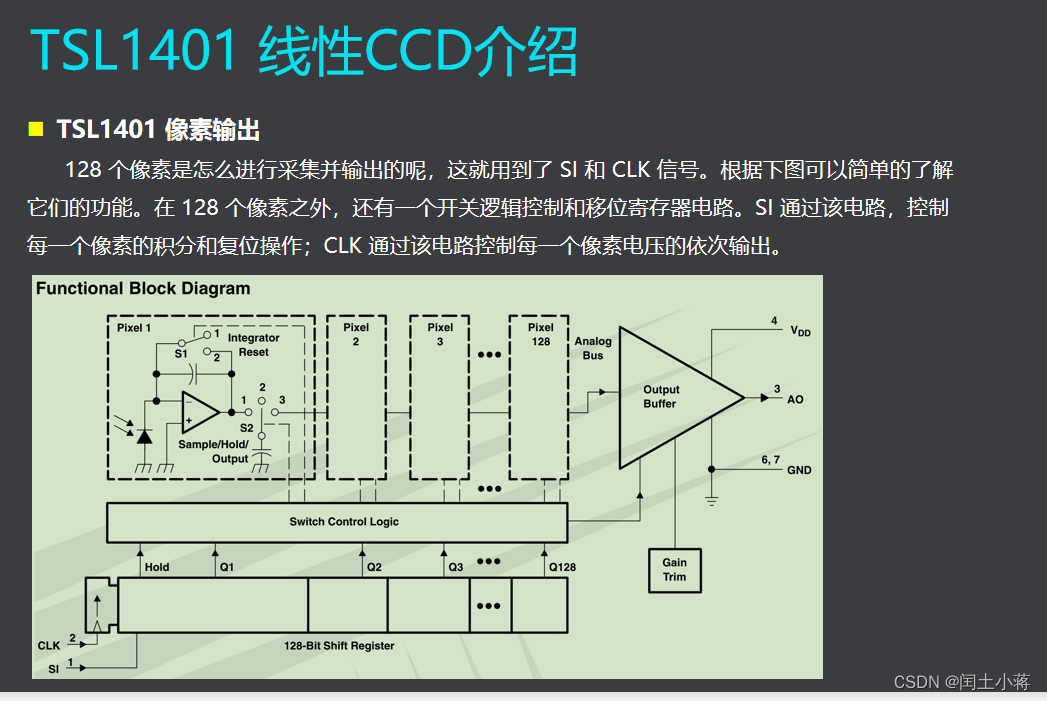
TSL1401 CCD摄像头?
参考案例 STM32版CCD线性摄像头寻线寻迹小车
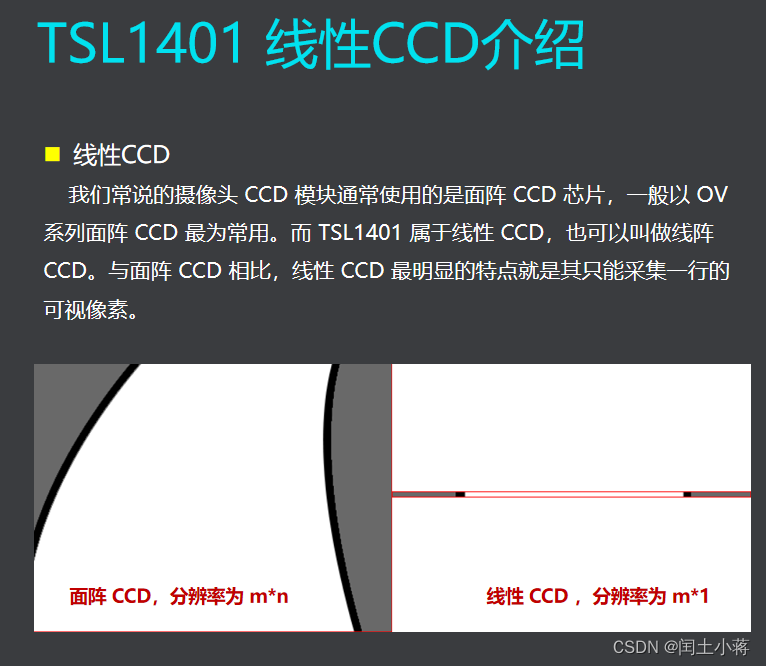

CCD采集到外部像素,感应光线的强度通过AD 输出
不同的光线强度的灰度值是不一样的,通过信号传输给控制器,控制器根据灰度值来确定我们的条件。
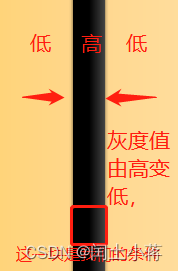
上图所从左到右,由亮变暗在变亮,中间黑色区域是最暗大的,我们使用线性 就是横排采集一条线,判断内容。
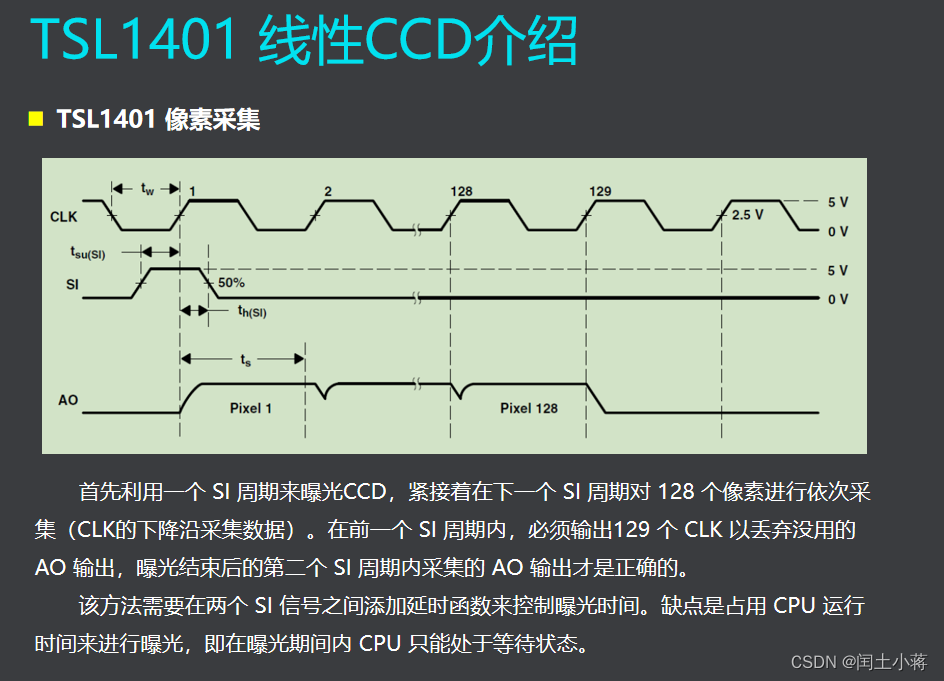
上图看到SI由采集的到最后AD输出的电压值。
巡线小车功能开发(编写程序)
电路图如下:
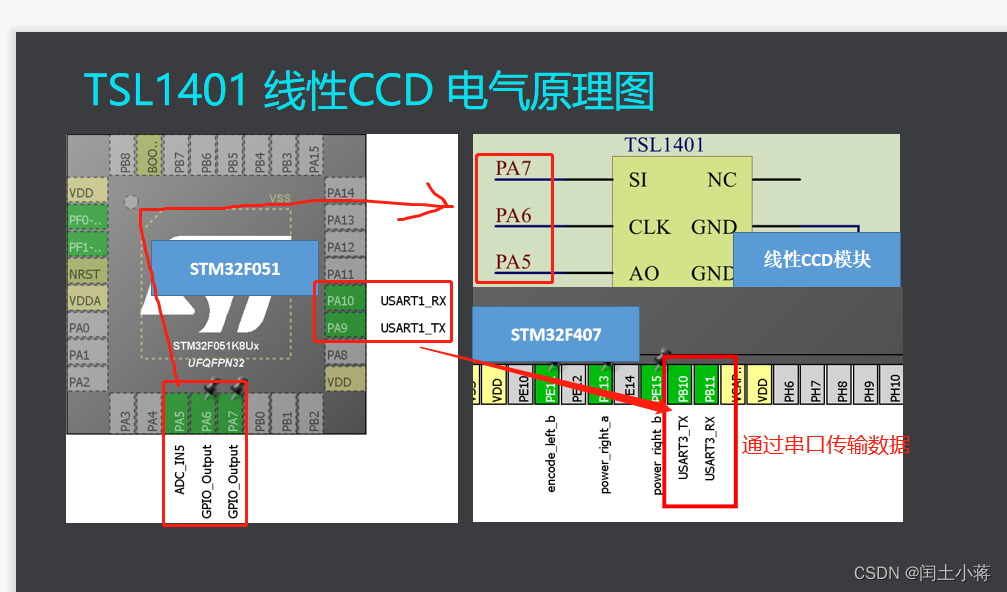
CCD查看使用教程
TSL1401 示例代码如下:
/**
******************************************************************************
* File Name : main.c
* Description : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2018 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f0xx_hal.h"
#include "adc.h"
#include "usart.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include <math.h>
#define CCD_MIDDLE 0
#define CCD_THRESHOLD 1
#define CCD_LEFT 2
#define CCD_RIGHT 3
#define TSL_CLK_H HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET)
#define TSL_CLK_L HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET)
#define TSL_SI_H HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET)
#define TSL_SI_L HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET)
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
uint16_t ADV[128]={0};
uint8_t i;
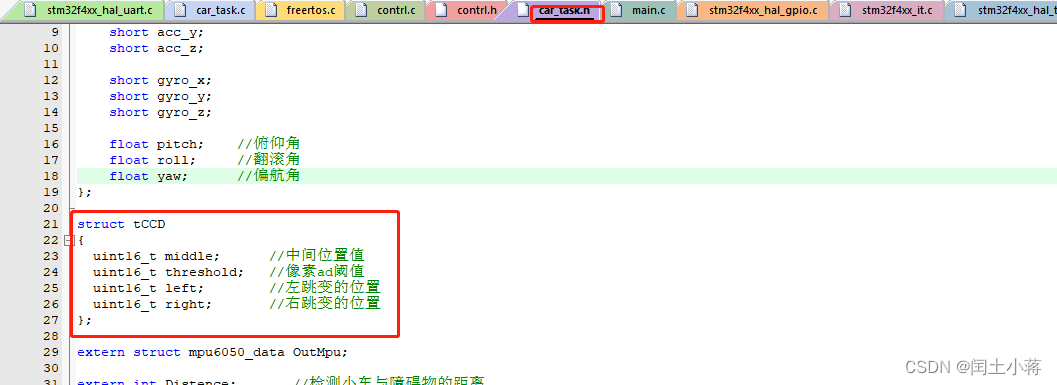
struct tCCD
{
uint16_t middle; //中间位置值
uint16_t threshold; //像素ad阈值
uint16_t left; //左跳变的位置
uint16_t right; //右跳变的位置
};
struct tCCD CCD;
/**************************************************************************************************
*函数名:abs()
*功能:将数进行绝对值处理
*形参:number 需要进行绝对值处理的数
*返回值:经过处理后绝对值
**************************************************************************************************/
int abs (int number)
{
return( number>=0 ? number : -number );
}
/**************************************************************************************************
*函数名:Dly_us()
*功能:延时函数,用来调整CCD曝光
*形参:无
*返回值:无
***************************************************************************************************/
void Dly_us(void)
{
int ii;
for(ii=0;ii<220;ii++);
}
/**************************************************************************************************
*函数名:Get_Adc()
*功能:得到CCD数据
*形参:无
*返回值:读取到的电压值
***************************************************************************************************/
uint16_t Get_Adc(void)
{
HAL_ADC_Start(&hadc);
HAL_ADC_PollForConversion(&hadc, 50);
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc), HAL_ADC_STATE_REG_EOC))
return HAL_ADC_GetValue(&hadc);
else
while(1);
}
/***************************************************************************************************
*函数名:RD_TSL()
*功能:读取CCD原始数据
*形参:无
*返回值:无
****************************************************************************************************/
void RD_TSL(void)
{
uint8_t i=0,tslp=0;
TSL_CLK_H;
TSL_SI_L;
Dly_us();
TSL_SI_H;
TSL_CLK_L;
Dly_us();
TSL_CLK_H;
TSL_SI_L;
Dly_us();
for(i=0;i<128;i++){
TSL_CLK_L;
Dly_us();
ADV[tslp]=(Get_Adc())>>4;
++tslp;
TSL_CLK_H;
Dly_us();
}
}
/************************************************************************************************************************
*函数名:Find_Middle_CCD()
*功能:读取CCD中值
*形参:无
*返回值:CCD中值位置
*************************************************************************************************************************/
uint8_t Find_CCD_DATA(void)
{
static uint8_t i,j;
//static uint8_t Last_Middle_CCD;
uint8_t Middle_CCD_Value;
static uint16_t value1_max,value1_min;
value1_max=ADV[0];
//读取最大值
for(i=5;i<123;i++){
if(value1_max<=ADV[i])
value1_max=ADV[i];
}
value1_min=ADV[0];
//得到最小值
for(i=5;i<123;i++){
if(value1_min>=ADV[i])
value1_min=ADV[i];
}
//计算阈值
CCD.threshold=(value1_max+value1_min)/2;
//计算左跳变值
for(i = 5;i<118; i++){
if(ADV[i]>CCD.threshold&&ADV[i+1]>CCD.threshold&&ADV[i+2]>CCD.threshold&&ADV[i+3]<CCD.threshold&&ADV[i+4]<CCD.threshold&&ADV[i+5]<CCD.threshold){
CCD.left=i;
break;
}
}
//计算右跳变值
for(j = 118;j>5; j--){
if(ADV[j]<CCD.threshold&&ADV[j+1]<CCD.threshold&&ADV[j+2]<CCD.threshold&&ADV[j+3]>CCD.threshold&&ADV[j+4]>CCD.threshold&&ADV[j+5]>CCD.threshold){
CCD.right=j;
break;
}
}
//计算中值
CCD.middle =(CCD.right+CCD.left)/2;
// if(abs(Middle_CCD_Value-Last_Middle_CCD)>70){
// Middle_CCD_Value=Last_Middle_CCD;
// Last_Middle_CCD=Middle_CCD_Value;
// }
return Middle_CCD_Value;
}
/***************************************************************************************************************************/
void ANO_Send_Data(void)
{
HAL_UART_Transmit(&huart1,(uint8_t *)&CCD,sizeof(CCD),0xFFFF);
}
/* USER CODE END 0 */
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_ADC_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
//每5ms发送一帧数据
HAL_Delay(5);
//读取CCD原始数据,读取128个像素,
RD_TSL();
//对CCD数据进行处理(求阈值、中值、左右跳变值)
Find_CCD_DATA();
//通过串口将封装好的CCD数据向外发送
ANO_Send_Data();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/** System Clock Configuration
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
RCC_PeriphCLKInitTypeDef PeriphClkInit;
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_HSI14;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSI14State = RCC_HSI14_ON;
RCC_OscInitStruct.HSICalibrationValue = 16;
RCC_OscInitStruct.HSI14CalibrationValue = 16;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL12;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV1;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_USART1;
PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param None
* @retval None
*/
void _Error_Handler(char * file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
项目工程开始
工程CCD工程 ,将工程下载到051 开发板进行数据采集发送
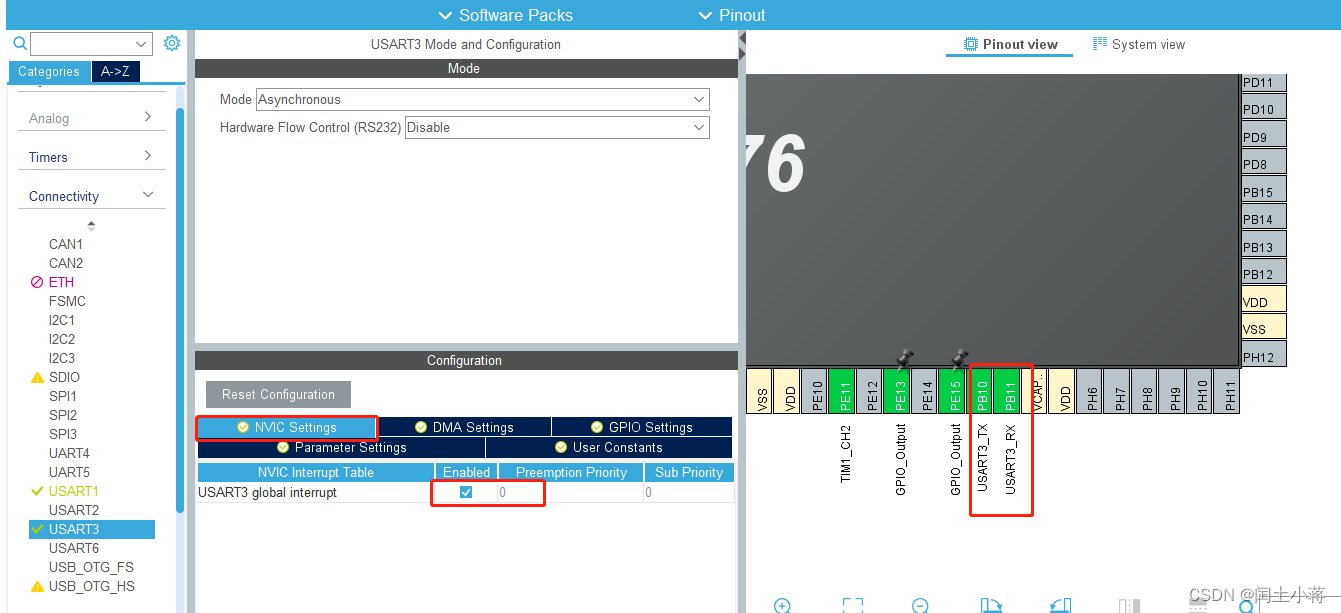
F407,串口3 使能,开启中断
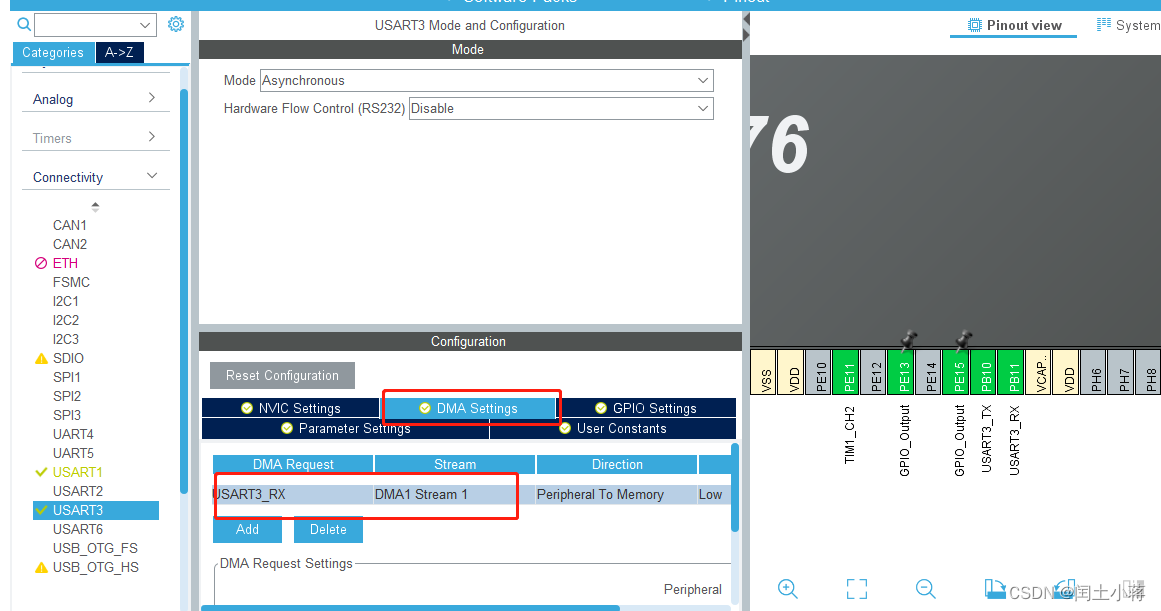
开启DMA 接受数据
导出工程即可打开工程文件
定义ccd
main 函数使用
//启动CCD数据接受
HAL_UART_Receive_DMA(&huart3, (uint8_t)&CCD, sizeof(CCD));*
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART1_UART_Init();
MX_TIM1_Init();
MX_TIM2_Init();
MX_TIM4_Init();
MX_TIM5_Init();
MX_TIM7_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
printf("平衡小车开发项目\n");
//启动PWM
HAL_TIM_PWM_Start(&htim5, TIM_CHANNEL_3);
HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1);
//启动编码器
HAL_TIM_Encoder_Start(&htim1, TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);
//启动CCD数据接受
HAL_UART_Receive_DMA(&huart3, (uint8_t*)&CCD, sizeof(CCD));
/* USER CODE END 2 */
/* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
设置中断检测初始化128像素后再次重新接受
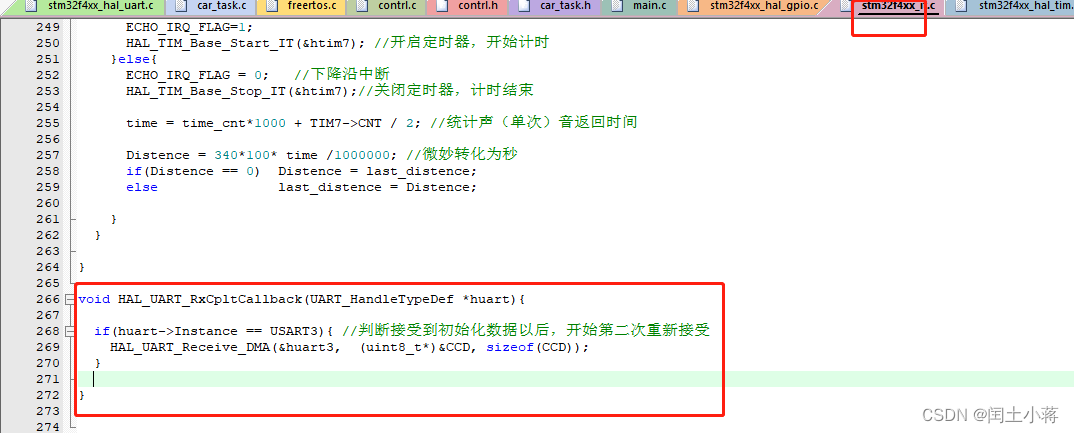
下面可以打印了
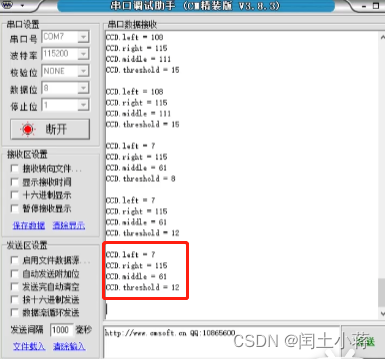
通过CCD 获取摄像头捕捉的中间值得差值在64以内就可以让小车通过转弯来重新定义方向和位置
Trun_Pwm = Vertical_turn_PD(CCD.middle,OutMpu.yaw); //直接转向 20度
struct tCCD
{
uint16_t middle; //中间位置值
uint16_t threshold; //像素ad阈值
uint16_t left; //左跳变的位置
uint16_t right; //右跳变的位置
};
三、遥控小车
蓝牙控制
esp32 项目工程的使用
使用过esp8266 的就了解过esp32 是 8266 升级款。
前期有几期是关于Node mcu esp8266 物联网模块的
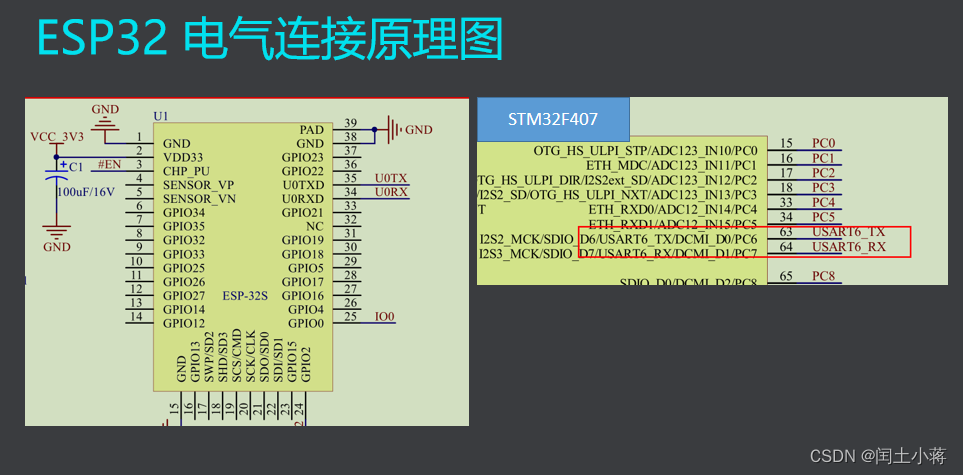
工作原理,小车F407 通过esp32 联网,和手机上位机软件进行数据交互请求,esp32 通过串口6 发送小车指令,来控制小车,前后,转向。
打开工程,使能串口6,开启中断
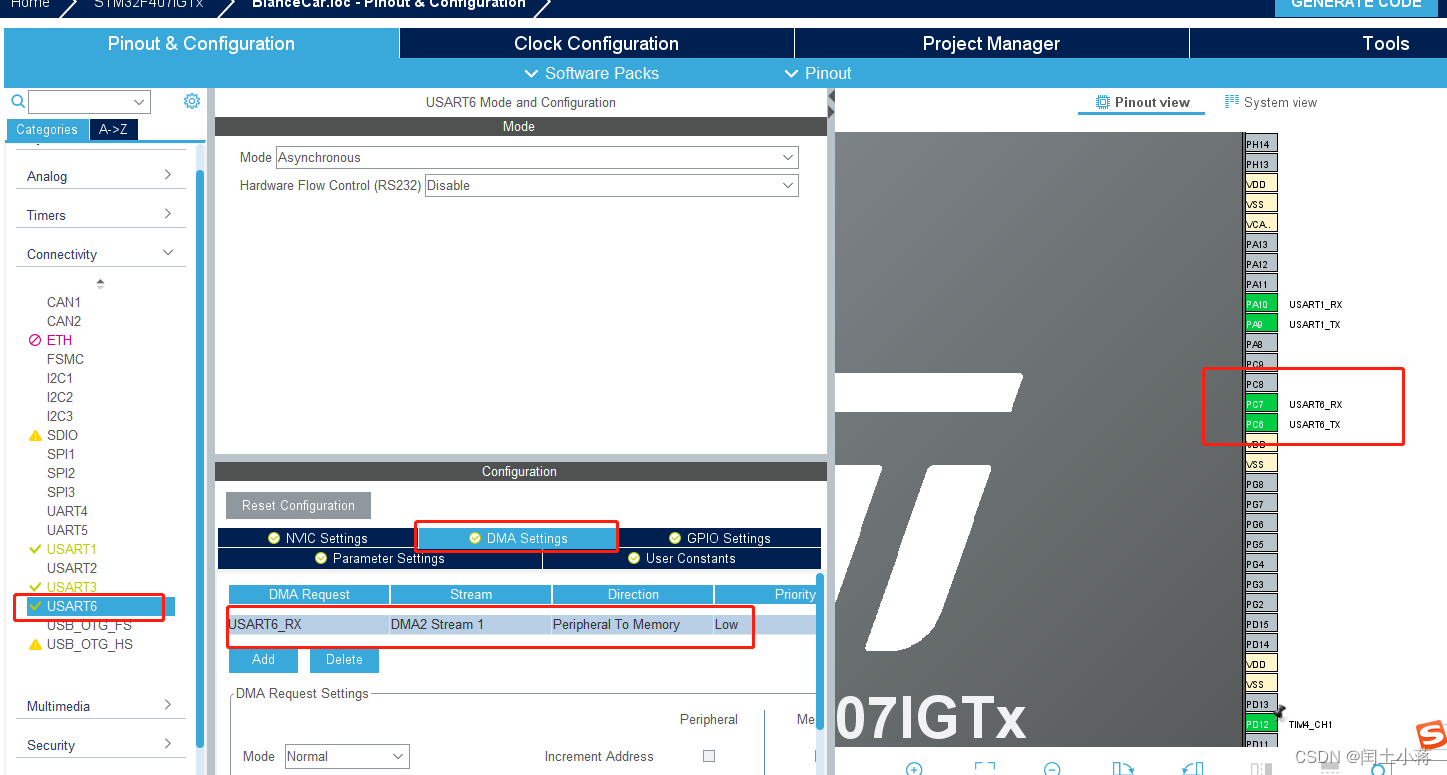
使用keil5 打开工程,配置串口接受esp32数据
FreeRTOS 任务里面配置数据的接收,其中使用到了队列管理xQueueCreate ,引入范例文件esp32 到工程,
void StartTask_Interaction(void const * argument)
{
/* USER CODE BEGIN StartTask_Interaction */
printf("交互进程运行\n");
Message_Queue = xQueueCreate (Message_Q_NUM,Message_Q_length);//创建一个队列
HAL_UART_Receive_DMA(&huart6, Uart6_Rcv.RcvBuf, 255);设置串口接收
__HAL_UART_ENABLE_IT(&huart6,UART_IT_IDLE); //使能中断
ESP32_Init();
/* Infinite loop */
for(;;)
{
ESP32_Data_Rcv(); //接受数据
Car_Task_Interaction(); //交互进程
osDelay(1);
}
/* USER CODE END StartTask_Interaction */
}
esp32 使用例程模板
方法函数的介绍
ESP32_Init(); esp32 的初始化
ESP32_Send_Data() esp32 数据的发送
ESP32_Cmd_Rcv()命令的接受
ESP32_Data_Rcv()数据的接受
ESPSend_Cmd() 命令的发送
uart_data_send() 串口的发送
esp32.c
#include "esp32.h"
#include "usart.h"
#include <stdarg.h>
#include <string.h>
#include "connect.h"
#include "FreeRTOS.h"
#include "task.h"
#include "cmsis_os.h"
uint8_t NET_MODE = 0; //0、蓝牙模式 1、wifi模式 默认蓝牙
uint8_t WIFI_CONNECT_FLAG = 0; //WIFI连接标志位
uint8_t BLE_CONNECT_FLAG = 0; //BLE连接标志位
tEsp32_RcvBuf Esp32Rcv; //ESP数据接收缓冲区
tTimeDelay ESP32_TimeDelay;
extern QueueHandle_t Message_Queue;
#define AT_CWSAP_STRING "AT+CWSAP=\"FarsightESP32\",\"123456789\",5,3\r\n"
#define AT_BLEADVDATA_STRING "AT+BLEADVDATA=\"0201060B09466172736967687420030302A0\"\r\n"
volatile tATCmd ATCmds[20]=
{
//*CmdSend, *CmdRcv, TimeOut, CmdStatus,
{NULL,NULL,0,NO_RCV},
{"AT\r\n", "OK", 5000, NO_RCV, }, //检测AT指令
{"AT+CIPAPMAC?\r\n", "CIPAPMAC", 2000, NO_RCV, }, //获取MAC地址
{AT_CWSAP_STRING, "CWSAP" , 2000, NO_RCV, }, //建立MAC相关的AP名称
{"AT+CWMODE=3\r\n", "OK" , 2000, NO_RCV, }, //设置WIFI模式AP+Station
{"AT+CIPMUX=1\r\n", "OK" , 2000, NO_RCV, }, //设置多连接
{"AT+CIPSERVER=1\r\n", "OK" , 2000, NO_RCV, }, //初始化TCP服务器 默认IP(192.168.4.1)默认端口号(333)
{"AT+CIPSTO=0\r\n", "OK" , 2000, NO_RCV, }, //设置TCP连接时间
{"AT+CIPSEND=0\r\n", "OK" , 500, NO_RCV, }, //TCP发送数据
{"AT+RST\r\n", "ready" , 1000, NO_RCV, }, //重启AT指令:
{"AT+BLEINIT=2\r\n", "OK" , 1000, NO_RCV, }, //初始化为 BLE server:
{"AT+BLEADDR?\r\n", "BLEADDR" , 2000, NO_RCV, }, //查询自身的 BLE 地址
{AT_BLEADVDATA_STRING, "OK" , 2000, NO_RCV, }, //配置广播数据包
{"AT+BLEGATTSSRVCRE\r\n", "OK", 1000, NO_RCV, }, //创建服务:
{"AT+BLEGATTSSRVSTART\r\n", "OK" , 3000, NO_RCV, }, //开启服务
{"AT+BLEADVSTART\r\n", "OK" , 1000, NO_RCV, }, //开始广播
{"AT+BLEGATTSNTFY\r\n" , ">" , 500, NO_RCV, }, //服务器发送数据
{"CMDSTR_NOUSE", "OK" , 2000, NO_RCV, },
};
void uart_data_send(uint8_t *fmt, uint16_t len)
{
taskENTER_CRITICAL();
HAL_UART_Transmit(&huart6, (uint8_t *)fmt, len,100);
taskEXIT_CRITICAL();
}
tCmdStatus ESPSend_Cmd(tATCmdNum ATCmdNum)
{
uint8_t len;
//清空接收缓存以及接收状态
ATCmds[ATCmdNum].CmdStatus = NO_RCV;
//发送命令
len = strlen(ATCmds[ATCmdNum].CmdSend);
uart_data_send((uint8_t *)ATCmds[ATCmdNum].CmdSend, len);
HAL_UART_Transmit(&huart1,(uint8_t *)ATCmds[ATCmdNum].CmdSend, len,100);
//打开超时定时器
SetTime(&ESP32_TimeDelay, ATCmds[ATCmdNum].TimeOut);
while(ATCmds[ATCmdNum].CmdStatus != RCV_SUCCESS)
{
ESP32_Cmd_Rcv(ATCmdNum);
if(ATCmds[ATCmdNum].CmdStatus == RCV_TIMEOUT)
return RCV_TIMEOUT;
}
return RCV_SUCCESS;
}
/*发送数据函数*/
tCmdStatus ESP32_Send_Data(uint8_t *SendBuf,uint8_t len)
{
uint8_t buf[30] = {0};
tATCmdNum ATCmdNum;
if(! (BLE_CONNECT_FLAG || WIFI_CONNECT_FLAG)) //未连接状态不能发送数据
{
DBG("未连接设备\n");
return NO_CONNECT;
}
if(NET_MODE == BLE_MODE) //蓝牙模式
{
sprintf((char *)buf,"AT+BLEGATTSNTFY=%d,%d,%d,%d\r\n",0,1,2,len);
ATCmdNum = AT_BLEGATTSNTFY;
}
else //WIFI模式
{
sprintf((char *)buf,"AT+CIPSEND=%d,%d\r\n",0,len);
ATCmdNum = AT_CIPSEND;
}
uart_data_send(buf,strlen((char *)buf)); //发送命令
//打开超时定时器
ATCmds[ATCmdNum].CmdStatus = NO_RCV; //清接收状态
SetTime(&ESP32_TimeDelay, ATCmds[ATCmdNum].TimeOut);
while(ATCmds[ATCmdNum].CmdStatus != RCV_SUCCESS)
{
ESP32_Cmd_Rcv(ATCmdNum);
if(ATCmds[ATCmdNum].CmdStatus == RCV_TIMEOUT)
return RCV_TIMEOUT;
}
uart_data_send( SendBuf,len); //发送数据
DBG("send data ok\n");
return RCV_SUCCESS;
}
void ESP32_Cmd_Rcv(tATCmdNum ATCmdNum)
{
memset(&Esp32Rcv,0,sizeof(Esp32Rcv));
if(xQueueReceive(Message_Queue, &Esp32Rcv,0 ))
{
DBG("%s", Esp32Rcv.RcvBuf);
//接收处理命令
if(strstr((const char*)Esp32Rcv.RcvBuf,ATCmds[ATCmdNum].CmdRcv) != NULL)
{
ATCmds[ATCmdNum].CmdStatus = RCV_SUCCESS;
}
//打开接收指示灯
//SetLedRun(LED_RX);
}
else
{
if(CompareTime(&ESP32_TimeDelay))
{
ATCmds[ATCmdNum].CmdStatus = RCV_TIMEOUT;
}
}
}
void ESP32_Data_Rcv(void)
{
memset(&Esp32Rcv,0,sizeof(Esp32Rcv));
if(xQueueReceive(Message_Queue, &Esp32Rcv,0 ))
{
//接收处理数据(保护客户端发来的数据,还有其他调试数据)
DBG("%s", Esp32Rcv.RcvBuf);
if(NET_MODE == BLE_MODE) //蓝牙模式
{
if(strstr((char *)(Esp32Rcv.RcvBuf),"WRITE") != NULL ) //收到客户端数据
{
DBG("收到上位机数据\n");
BLE_CONNECT_FLAG = 1; //对方打开读写特征值时,置连接标志
//提取处理数据;
EP32_RcvData_Extract(Esp32Rcv.RcvBuf,Esp32Rcv.DataLen);
return ;
}
if(strstr((char *)(Esp32Rcv.RcvBuf),"BLEDISCONN") != NULL) //客户端断开连接
{
DBG("蓝牙断开连接,重新广播\n");
BLE_CONNECT_FLAG = 0; //清除连接标志位
//重新广播
ESPSend_Cmd(AT_BLEADVDATA);
ESPSend_Cmd(AT_BLEADVSTART);
}
}
else //WIFI模式
{
if((!WIFI_CONNECT_FLAG) && (strstr((char *)(Esp32Rcv.RcvBuf),"CONNECT")!=NULL )) //收到客户端数据
{
DBG("WIFI已连接\n");
WIFI_CONNECT_FLAG = 1; //置连接标志位
}
if(strstr((char *)(Esp32Rcv.RcvBuf),"+IPD") != NULL ) //收到客户端数据
{
DBG("WIFI收到上位机数据\n");
//提取并处理数据;
EP32_RcvData_Extract(Esp32Rcv.RcvBuf,Esp32Rcv.DataLen);
return ;
}
if(strstr((char *)(Esp32Rcv.RcvBuf),"CLOSED") != NULL) //客户端断开连接
{
DBG("WIFI断开连接\n");
WIFI_CONNECT_FLAG = 0; //清除连接标志位
}
}
}
}
void ESP32_Init(void)
{
tATCmdNum i = AT_IDIE;
if(NET_MODE == BLE_MODE) //蓝牙模式初始化
{
for(i = AT_BLEINIT; i<=AT_BLEADVSTART ; i++)
{
if( ESPSend_Cmd(i) != RCV_SUCCESS)
{
DBG("PES32 Init failed\n");
return ;
}
}
}
else //WIFI模式初始化
{
for(i = AT; i<=AT_CIPSTO ; i++)
{
if( ESPSend_Cmd(i) != RCV_SUCCESS)
{
DBG("PES32 Init failed\n");
return ;
}
}
DBG("PES32 Init Success\n");
}
}
esp32.h
#ifndef __ESP32_H
#define __ESP32_H
#include <stdint.h>
#include <stdio.h>
#include "delay.h"
extern uint8_t Esp32_RcvBuf [255];
extern uint8_t Esp32_RBuffLen ;
//#define DEBUG
#ifdef DEBUG
#define DBG(x...) printf(x)
#else
#define DBG(x...)
#endif
#define BLE_MODE 0
#define WIFI_MODE 1
//AT命令序列号
typedef enum
{
AT_IDIE = 0,
AT,
AT_CIPAPMAC,
AT_CWSAP,
AT_CWMODE,
AT_CIPMUX,
AT_CIPSERVER,
AT_CIPSTO,
AT_CIPSEND,
AT_RST,
AT_BLEINIT,
AT_BLEADDR,
AT_BLEADVDATA,
AT_BLEGATTSSRVCRE,
AT_BLEGATTSSRVSTART,
AT_BLEADVSTART,
AT_BLEGATTSNTFY,
CMDSTR_NOUSE,
}tATCmdNum;
//命令返回结果的状态
typedef enum{
NO_RCV = 0,
RCV_SUCCESS,
RCV_TIMEOUT,
NO_CONNECT,
}tCmdStatus;
typedef struct{
char *CmdSend; //发送的命令
char *CmdRcv; //正确返回包含的字符串
uint16_t TimeOut; //超时的时间
tCmdStatus CmdStatus; //命令返回的状态
}tATCmd;
typedef struct {
uint8_t DataLen;
uint8_t RcvBuf [255];
}tEsp32_RcvBuf;
extern tTimeDelay ESP32_TimeDelay;
extern uint8_t Esp32_RcvBuf [255];
extern uint8_t ESP32_RCV_FLAG;
extern uint8_t NET_MODE ;
extern uint8_t WIFI_CONNECT_FLAG ; //WIFI连接标志位
extern uint8_t BLE_CONNECT_FLAG ; //BLE连接标志位
void ESP32_Cmd_Rcv(tATCmdNum ATCmdNum);
tCmdStatus ESP32_Send_Data(uint8_t *SendBuf,uint8_t len);
void ESP32_Init(void);
void ESP32_Data_Rcv(void);
#endif /*__ESP32_H*/
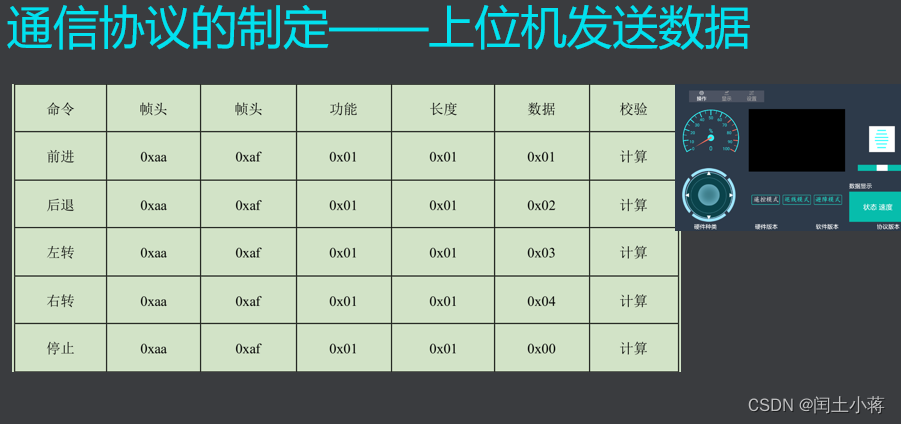
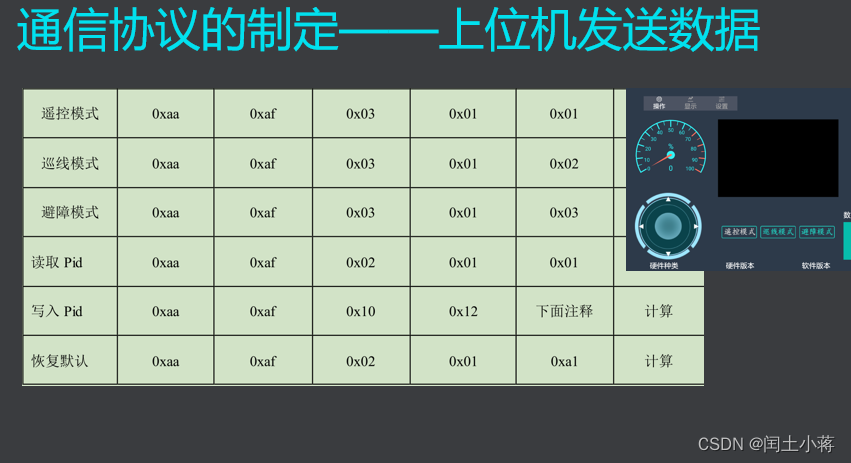
通讯协议的制定

- 引入范例文件connect 到工程,
通讯协议定制库函数文件(范例)
connect.h
#ifndef __CONNECT_H
#define __CONNECT_H
#include <stdint.h>
//功能宏定义
#define MOVEMENT 0X01 //小车动作
#define READINFO 0X02 //读取PID、模式、版本,恢复默认参数
#define SETMODE 0X03 //设置小车工作模式
#define WRITEPID1 0X10 //设置PID1
#define WRITEPID2 0X11 //设置PID2
//小车动作宏定义
#define CAR_STOP 0X00 //停止
#define CAR_FORWARD 0X01 //前进
#define CAR_BACK 0X02 //后退
#define CAR_TURN_LEFT 0X03 //左转
#define CAR_TURN_RIGHT 0X04 //右转
//小车工作模式定义
#define REMOTE_MODE 0X01 //遥控模式
#define LINE_TRACK_MODE 0X02 //巡线模式
#define AVOID_MODE 0X03 //蔽障模式
//读取小车信息定义
#define READ_ALL_ARG 0X00 //读取所有的数据
#define READ_PID 0X01 //读取PID数据
#define READ_WORK_MODE 0X02 //读取当前工作模式
#define READ_VERINFO 0XA0 //读取版本信息
#define RESTORE_DEFAULT_ARG 0XA1 //恢复默认参数
//定义版本相关信息
#define Hardware_Type 10
#define Hardware_VER 10
#define Software_VER 10
#define Protocol_VER 10
//定义小车上报数据的功能类型
#define CAR_VER 0x00 //版本信息
#define CAR_POSE 0x01 //姿态
#define CAR_SENSER 0x02 //传感器原始数据
#define CAR_RCDATA 0x03 //小车接收到的遥控数据
#define CAR_POWER 0x04 //小车电量
#define CAR_MOTO 0x05 //电机转速
#define CAR_SENSER2 0x06 //超声波距离
#define CAR_MOD 0X07 //小车模式
#define CAR_PID_1 0x10 //PID1数据
#define CAR_PID_2 0x11 //PID2的数据
#define CAR_PID_3 0X12 //PID3的数据
#define CAR_CCD_SEN 0XF1 //CCD的数据
#define CAR_User_Waveform 0xA1
typedef struct
{
u8 send_check;
u8 send_version;
u8 send_status;
u8 send_senser;
u8 send_senser2;
u8 send_pid1;
u8 send_pid2;
u8 send_pid3;
u8 send_pid4;
u8 send_pid5;
u8 send_pid6;
u8 send_rcdata;
u8 send_offset;
u8 send_motopwm;
u8 send_power;
u8 send_user;
u8 send_speed;
u8 send_location;
}dt_flag_t;
u8 EP32_RcvData_Extract(const uint8_t *Buff,int len);
void Connect_Send_data(u8 CMD_Data);
#endif
connect.c
#include "inv_mpu_user.h"
#include "connect.h"
#include "string.h"
#include "stdio.h"
#include "esp32.h"
#include "car_task.h"
#include "contrl.h"
/**************************************************************************************************************
*函数名:package_report_data()
*功能:添加帧头功能字及校验位
*形参:(u8 fun):功能字/(u8*data):要发送的数据包/(u8 len):长度
*返回值:无
**************************************************************************************************************/
static void package_report_data(u8 fun,u8*data,u8 len)
{
static u8 send_buf[40]={0}; //添加static,给栈减小一点压力
u16 check_sum=0;
u8 i;
//封装协议头
if(len>28)return;
send_buf[0]=0XAA;
send_buf[1]=0XAA;
send_buf[2]=fun;
send_buf[3]=len;
//封装数据
for(i=0;i<len;i++)send_buf[4+i]=data[i];
//计算校验值
for(i=0;i<len+4;i++) check_sum+=send_buf[i];
send_buf[len+4]=((check_sum)&0xFF);
//发送数据
ESP32_Send_Data(send_buf,len+5);
}
/*********************************************************************************************************
*函数名:ANO_VER()
*功能:发送版本信息
*形参:HardwareType,HardwareVER,SoftwareVER,ProtocolVER
*返回值:无
*********************************************************************************************************/
static void ANO_VER(u8 HardwareType,u16 HardwareVER,u16 SoftwareVER,u16 ProtocolVER)
{
static u8 tbuf[7];
tbuf[0]=(HardwareType)&0XFF;
tbuf[1]=((HardwareVER)>>8)&0XFF;
tbuf[2]=(HardwareVER)&0XFF;
tbuf[3]=((SoftwareVER)>>8)&0XFF;
tbuf[4]=(SoftwareVER)&0XFF;
tbuf[5]=((ProtocolVER)>>8)&0XFF;
tbuf[6]=(ProtocolVER)&0XFF;
package_report_data(CAR_VER,tbuf,7);
}
/*************************************************************************************************************
*函数名:ANO_MOD()
*功能:发送当前模式
*形参:data模式
*返回值:无
*************************************************************************************************************/
static void ANO_MOD(u8 data)
{
u8 tbuf[1];
tbuf[0]=(data)&0XFF;
package_report_data(CAR_POSE,tbuf,1);
}
/**********************************************************************************************************
*函数名:ANO_CAR_POSE()
*功能:发送姿态
*形参:angle(x俯仰,y横滚,z偏航)
*返回值:无
***********************************************************************************************************/
static void ANO_CAR_POSE(void)
{
static u8 tbuf[6];
int32_t anglex,angley,anglez;
anglex=((short)(OutMpu.pitch))*100;
angley=((short)(OutMpu.roll))*100;
anglez=((short)(OutMpu.yaw))*100;
tbuf[0]=((anglex)>>8)&0XFF;
tbuf[1]=(anglex)&0XFF;
tbuf[2]=((angley)>>8)&0XFF;
tbuf[3]=(angley)&0XFF;
tbuf[4]=((anglez)>>8)&0XFF;
tbuf[5]=(anglez)&0XFF;
package_report_data(CAR_POSE,tbuf,6);
}
/**************************************************************************************************************
*函数名:ANO_SENSER()
*功能:发送传感器原数据
*形参:acc:陀螺仪,gyro:加速度计,mag:电子罗盘
*返回值:无
**************************************************************************************************************/
static void ANO_SENSER(void)
{
static u8 tbuf[18];
u8 accx,accy,accz,gyrox,gyroy,gyroz,magx,magy,magz;
accx=(u8)((OutMpu.acc_x)*100);
accy=(u8)((OutMpu.acc_y)*100);
accz=(u8)((OutMpu.acc_z)*100);
gyrox=(u8)((OutMpu.gyro_x)*100);
gyroy=(u8)((OutMpu.gyro_x)*100);
gyroz=(u8)((OutMpu.gyro_x)*100);
// magx=(u8)((mag->x)*100);
// magy=(u8)((mag->y)*100);
// magz=(u8)((mag->z)*100);
tbuf[0]=((accx)>>8)&0XFF;
tbuf[1]=(accx)&0XFF;
tbuf[2]=((accy)>>8)&0XFF;
tbuf[3]=(accy)&0XFF;
tbuf[4]=((accz)>>8)&0XFF;
tbuf[5]=(accz)&0XFF;
tbuf[6]=((gyrox)>>8)&0XFF;
tbuf[7]=(gyrox)&0XFF;
tbuf[8]=((gyroy)>>8)&0XFF;
tbuf[9]=(gyroy)&0XFF;
tbuf[10]=((gyroz)>>8)&0XFF;
tbuf[11]=(gyroz)&0XFF;
tbuf[12]=((magx)>>8)&0XFF;
tbuf[13]=(magx)&0XFF;
tbuf[14]=((magy)>>8)&0XFF;
tbuf[15]=(magy)&0XFF;
tbuf[16]=((magz)>>8)&0XFF;
tbuf[17]=(magz)&0XFF;
package_report_data(CAR_SENSER,tbuf,18);
}
/*************************************************************************************************************
*函数名:ANO_PID()
*功能:发送PID数据
*形参:PID1,PID2,PID3的参数
*返回值:无
**************************************************************************************************************/
static void ANO_PID(u8 Function)
{
static u8 tbuf[18];
int16_t PID1_P,PID1_I,PID1_D,PID2_P,PID2_I,PID2_D,PID3_P,PID3_I,PID3_D;
PID1_P=(u16)((PID.Balance_Kp)*100);
PID1_I=(u16)((PID.Balance_Ki)*100);
PID1_D=(u16)((PID.Balance_Kd)*100);
PID2_P=(u16)((PID.Velocity_Kp)*100);
PID2_I=(u16)((PID.Velocity_Ki)*100);
PID2_D=(u16)((PID.Velocity_Kd)*100);
PID3_P=(u16)((PID.Turn_Kp)*100);
PID3_I=(u16)((PID.Turn_Ki)*100);
PID3_D=(u16)((PID.Turn_Kd)*100);
tbuf[0]=((PID1_P)>>8)&0XFF;
tbuf[1]=(PID1_P)&0XFF;
tbuf[2]=((PID1_I)>>8)&0XFF;
tbuf[3]=(PID1_I)&0XFF;
tbuf[4]=((PID1_D)>>8)&0XFF;
tbuf[5]=(PID1_D)&0XFF;
tbuf[6]=((PID2_P)>>8)&0XFF;
tbuf[7]=(PID2_P)&0XFF;
tbuf[8]=((PID2_I)>>8)&0XFF;
tbuf[9]=(PID2_I)&0XFF;
tbuf[10]=((PID2_D)>>8)&0XFF;
tbuf[11]=(PID2_D)&0XFF;
tbuf[12]=((PID3_P)>>8)&0XFF;
tbuf[13]=(PID3_P)&0XFF;
tbuf[14]=((PID3_I)>>8)&0XFF;
tbuf[15]=(PID3_I)&0XFF;
tbuf[16]=((PID3_D)>>8)&0XFF;
tbuf[17]=(PID3_D)&0XFF;
if(Function==1)
package_report_data(CAR_PID_1,tbuf,18);
if(Function==2)
package_report_data(CAR_PID_2,tbuf,18);
if(Function==3)
package_report_data(CAR_PID_1,tbuf,18);
}
/**************************************************************************************************************
*函数名:ANO_CCD_SEN()
*功能:发送CCD数据
*形参:ccd:CCD数据包括(阈值,中值,左跳变,右跳变)
*返回值:无
***************************************************************************************************************/
void ANO_CCD_SEN(void)
{
static u8 tbuf[8];
u16 CCD_MIDDLE,CCD_THRESHOLD,CCD_LEFT,CCD_RIGHT;
CCD_MIDDLE=CCD.middle;
CCD_THRESHOLD=CCD.threshold;
CCD_LEFT=CCD.left;
CCD_RIGHT=CCD.right;
tbuf[0]=((CCD_MIDDLE)>>8)&0XFF;
tbuf[1]=(CCD_MIDDLE)&0XFF;
tbuf[2]=((CCD_THRESHOLD)>>8)&0XFF;
tbuf[3]=(CCD_THRESHOLD)&0XFF;
tbuf[4]=((CCD_LEFT)>>8)&0XFF;
tbuf[5]=(CCD_LEFT)&0XFF;
tbuf[6]=((CCD_RIGHT)>>8)&0XFF;
tbuf[7]=(CCD_RIGHT)&0XFF;
package_report_data(CAR_CCD_SEN,tbuf,8);
}
/*************************************************************************************************************
*函数名:ANO_POWER()
*功能:发送电量
*形参:data:电量(0%,25%,50%,75%,100%)
*返回值:
**************************************************************************************************************/
void ANO_POWER(u16 data)
{
static u8 tbuf[2];
tbuf[0]=((data)>>8)&0XFF;
tbuf[1]=(data)&0XFF;
package_report_data(CAR_POWER,tbuf,2);
}
/*************************************************************************************************************
*函数名:ANO_MOTO()
*功能:发送电机转速
*形参:PWM_MOTO:电机转速
*返回值:无
**************************************************************************************************************/
void ANO_MOTO(float PWM_MOTO)
{
u16 PWM_Percentage;
static u8 tbuf[2];
PWM_Percentage=fabs(PWM_MOTO)*1.24;
tbuf[0]=((PWM_Percentage)>>8)&0XFF;
tbuf[1]=(PWM_Percentage)&0XFF;
package_report_data(CAR_MOTO,tbuf,2);
}
/**************************************************************************************************************
*函数名:Connect_Send_data()
*功能:发送数据给上位机
*形参:
*返回值:无
**************************************************************************************************************/
void Connect_Send_data(u8 CMD_Data)
{
switch(CMD_Data)
{
case READ_ALL_ARG:
// DBG("\r发送数据到上位机\n");
// ANO_VER(Hardware_Type,Hardware_VER,Software_VER,Protocol_VER);
// ANO_MOD(FS_MODE);
ANO_CAR_POSE();
ANO_SENSER();
// ANO_RCDATA(F_CMD,Movement);
// ANO_POWER(power);
ANO_MOTO(Encoder_right);
// ANO_SENSER2(Distance);
ANO_CCD_SEN();
break;
case READ_PID:
DBG("\r发送PID请求\n");
ANO_PID(1);
break;
case READ_WORK_MODE:
DBG("\r发送当前模式\n");
ANO_MOD(FS_MODE);
break;
case READ_VERINFO:
DBG("\r发送版本信息\n");
ANO_VER(Hardware_Type,Hardware_VER,Software_VER,Protocol_VER);
break;
default:
break;
}
}
/**************************************************************************************************************
*函数名:Host_Data_Receive_Anl()
*功能:上位机数据包解析
*形参:(u8 *data_buf):缓存区中的接收到的数据/(u8 num):数据包长度
*返回值:无
**************************************************************************************************************/
void Host_Data_Receive_Anl(u8 *data_buf,u8 num)
{
u8 sum = 0,i;
u8 function = *(data_buf+2),cmd = *(data_buf+4);
//从帧头道数据位的计算校验;
DBG("收到有效数据:");
for(i=0;i<(num-1);i++)
{
DBG("%x ",*(data_buf+i));
sum += *(data_buf+i);
}
DBG("\r\n");
校验不过直接返回
if(sum != *(data_buf+num-1) ) return;
//判断帧头
if(!(*(data_buf)==0xAA && *(data_buf+1)==0xAF)) return;
switch(function)
{
case MOVEMENT:
DBG("设置小车动作\n");
switch(cmd)
{
case CAR_STOP:
DBG("小车停止\n");
if(FS_MODE==0){
Contrl_Turn=64;
Movement=0;
}
break;
case CAR_FORWARD:
DBG("小车前进\n");
if(FS_MODE==0){
Contrl_Turn=64;
Movement=50;
}
break;
case CAR_BACK:
DBG("小车后退\n");
if(FS_MODE==0){
Contrl_Turn = 64;
Movement = -50;
}
break;
case CAR_TURN_LEFT:
DBG("小车左转\n");
if(FS_MODE==0){
Contrl_Turn=30;
Movement=0;
}
break;
case CAR_TURN_RIGHT:
DBG("小车右转\n");
if(FS_MODE==0){
Contrl_Turn=98;
Movement=0;
}
break;
default:
break;
}
break;
case READINFO:
DBG("读取小车基本信息\n");
switch(cmd)
{
case READ_PID:
DBG("读取PID数据\n");
break;
case READ_WORK_MODE:
DBG("读取当前工作模式\n");
break;
case READ_VERINFO:
DBG("读取版本信息\n");
break;
case RESTORE_DEFAULT_ARG:
DBG("恢复默认参数\n");
PID.Balance_Kp=200;
PID.Balance_Kd=1;
PID.Velocity_Kp=-60;
PID.Velocity_Ki=-0.3;
PID.Turn_Kp = 18;
PID.Turn_Kd = 0.18;
break;
default:
break;
}
break;
case SETMODE:
DBG("设置小车工作模式\n");
switch(cmd)
{
case REMOTE_MODE:
DBG("遥控模式\n");
FS_MODE = 0;
break;
case AVOID_MODE:
DBG("避障模式\n");
FS_MODE = 1;
break;
case LINE_TRACK_MODE:
DBG("巡线模式\n");
FS_MODE = 2;
break;
default:
break;
}
break;
case WRITEPID1:
//上位机发送9个的16位数,*100后发送过来的,
DBG("设置小车PID1\n");
PID.Balance_Kp = 0.01*( (vs16)(*(data_buf+4)<<8)|*(data_buf+5) );
PID.Balance_Ki = 0.01*( (vs16)(*(data_buf+6)<<8)|*(data_buf+7) );
PID.Balance_Kd = 0.01*( (vs16)(*(data_buf+8)<<8)|*(data_buf+9) );
PID.Velocity_Kp = 0.01*( (vs16)(*(data_buf+10)<<8)|*(data_buf+11) );
PID.Velocity_Ki = 0.01*( (vs16)(*(data_buf+12)<<8)|*(data_buf+13) );
PID.Velocity_Kd = 0.01*( (vs16)(*(data_buf+14)<<8)|*(data_buf+15) );
PID.Turn_Kp = 0.01*( (vs16)(*(data_buf+16)<<8)|*(data_buf+17) );
PID.Turn_Ki = 0.01*( (vs16)(*(data_buf+18)<<8)|*(data_buf+19) );
PID.Turn_Kd = 0.01*( (vs16)(*(data_buf+20)<<8)|*(data_buf+21) );
break;
case WRITEPID2:
DBG("设置小车PID2\n");
break;
default:
break;
}
}
/**********************************************************************************************************
*函数名:EP32_RcvData_Extract
*功能:提取ESP32中有效数据,并且将其拷贝到缓存区中
*形参:中断接收的数据
*返回值:成功返回0,失败返回1
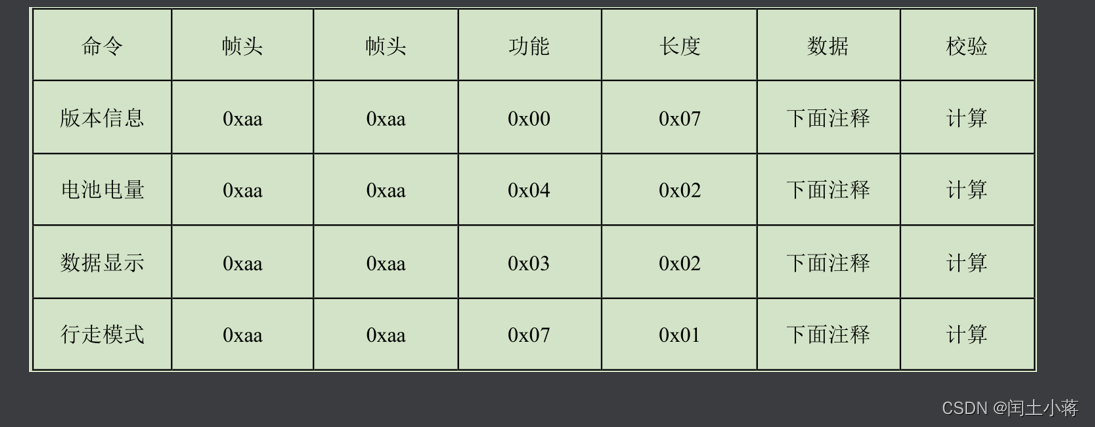
注:数据格式
命令 帧头 帧头 功能 长度 数据 校验
例: 前进 0xaa 0xaf 0x01 0x01 0x01 计算
***********************************************************************************************************/
u8 EP32_RcvData_Extract(const uint8_t *Buff,int len)
{
static u8 RxBuffer[50];
static int data_len = 0,data_cnt = 0;
static u8 state = 0;
u8 i, data;
for(i=0;i<len ;i++){
data = Buff[i];
//判断帧头
if(state==0&&data==0xAA)
{
state=1;
RxBuffer[0]=data;
}
else if(state==1&&data==0xAF)
{
state=2;
RxBuffer[1]=data;
}
//功能字截止到0XF1
else if(state==2&&data<0XF1)
{
state=3;
RxBuffer[2]=data;
}
//数据长度小于50
else if(state==3&&data<50)
{
state = 4;
RxBuffer[3]=data;
data_len = data;
data_cnt = 0;
}
//将数据复制到RxBuffer中
else if(state==4&&data_len>0)
{
data_len--;
RxBuffer[4+data_cnt++]=data;
if(data_len==0)
state = 5;
}
//计算校验值
else if(state==5)
{
state = 0;
RxBuffer[4+data_cnt]=data;
Host_Data_Receive_Anl(RxBuffer,data_cnt+5);
memset(RxBuffer,0,50);
return 0;
}
}
return 1;
}
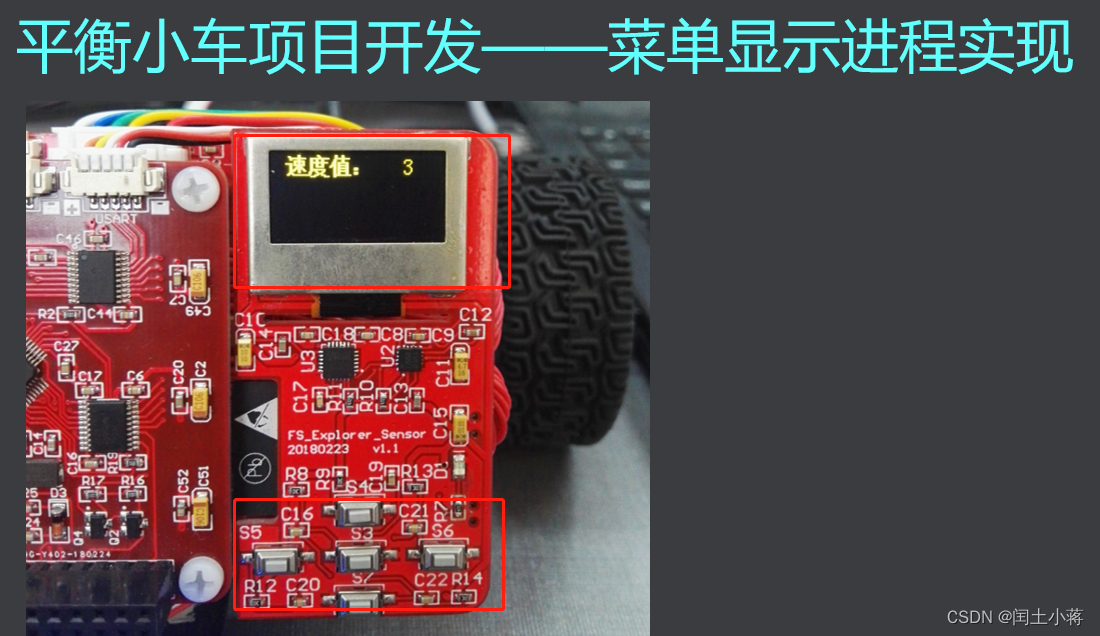
oled 显示置入屏幕显示小车状态
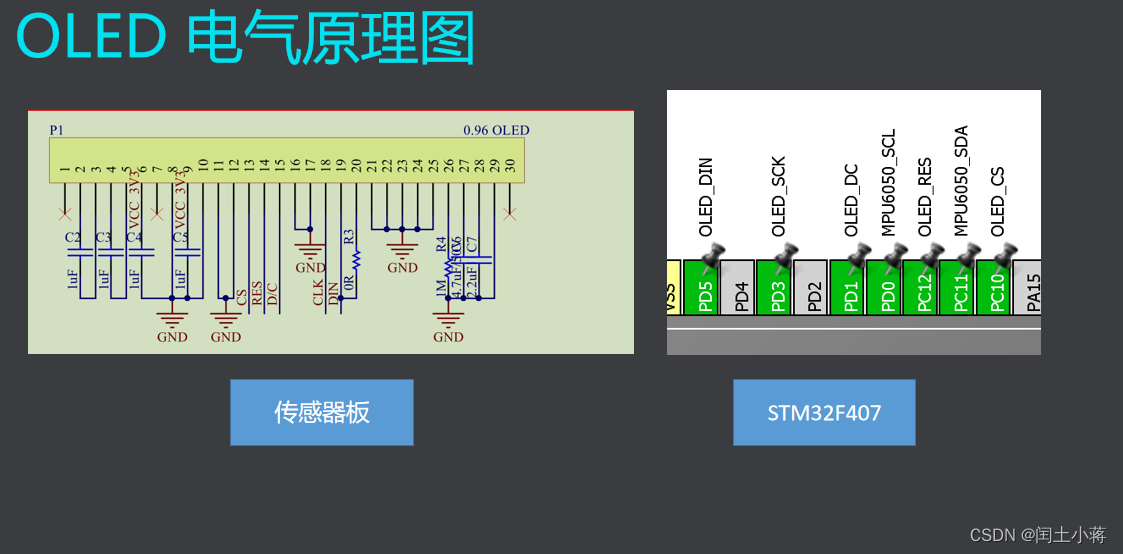
096 oled 已经不陌生了,都已经使用很多次了。iic 数据传输。
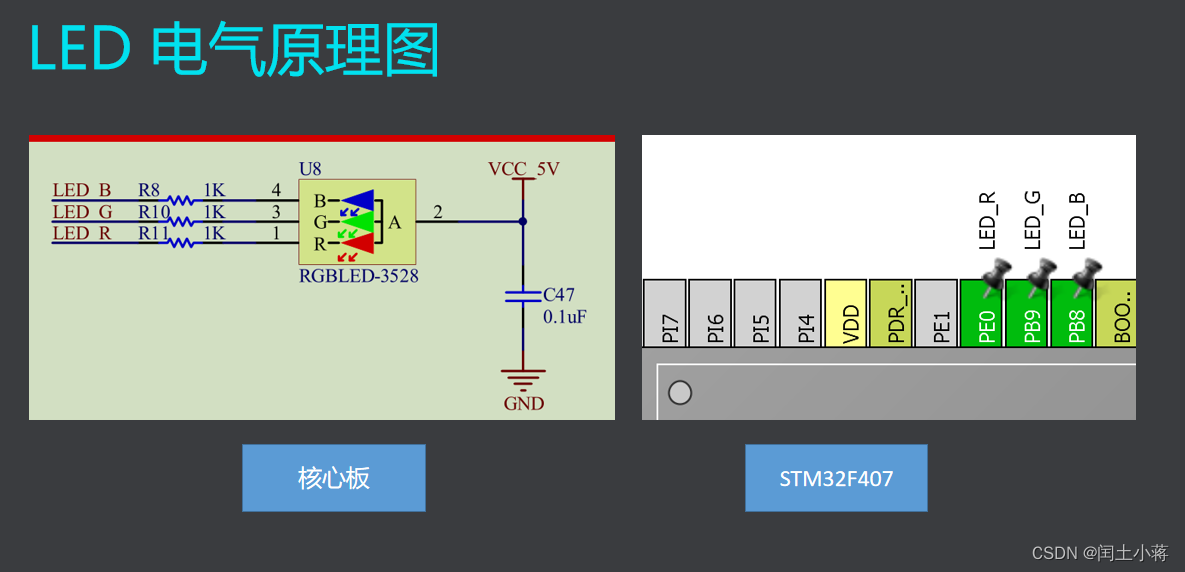
- oled 显示电路
2. 按键原理图
-
蜂鸣器 电气原理图
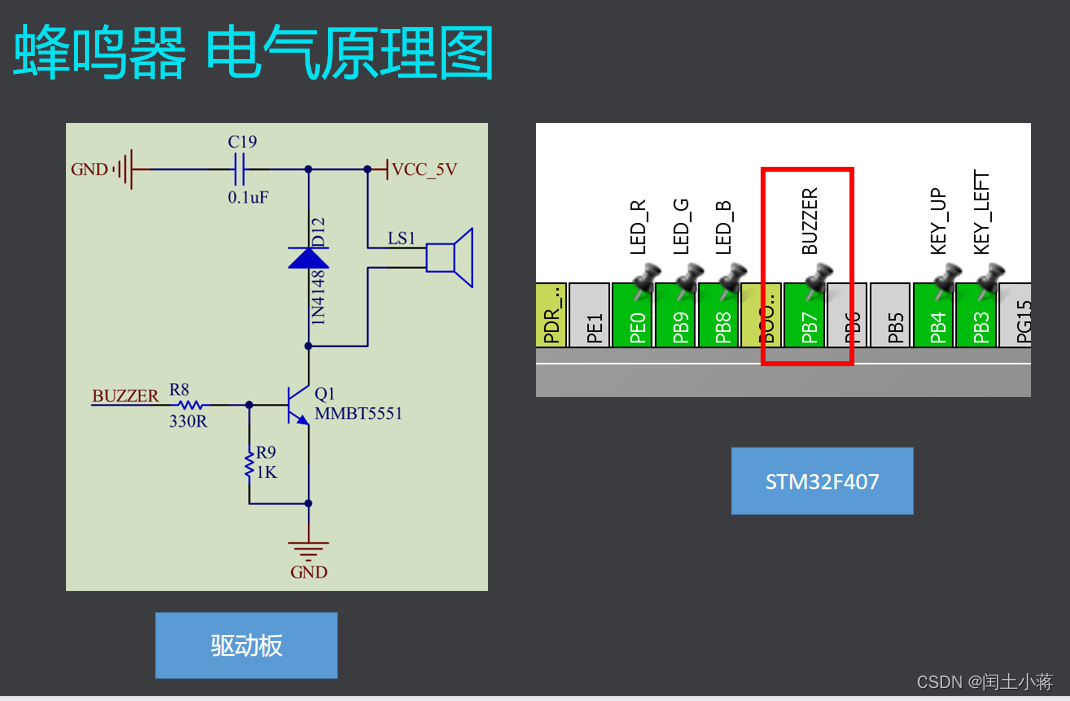
-
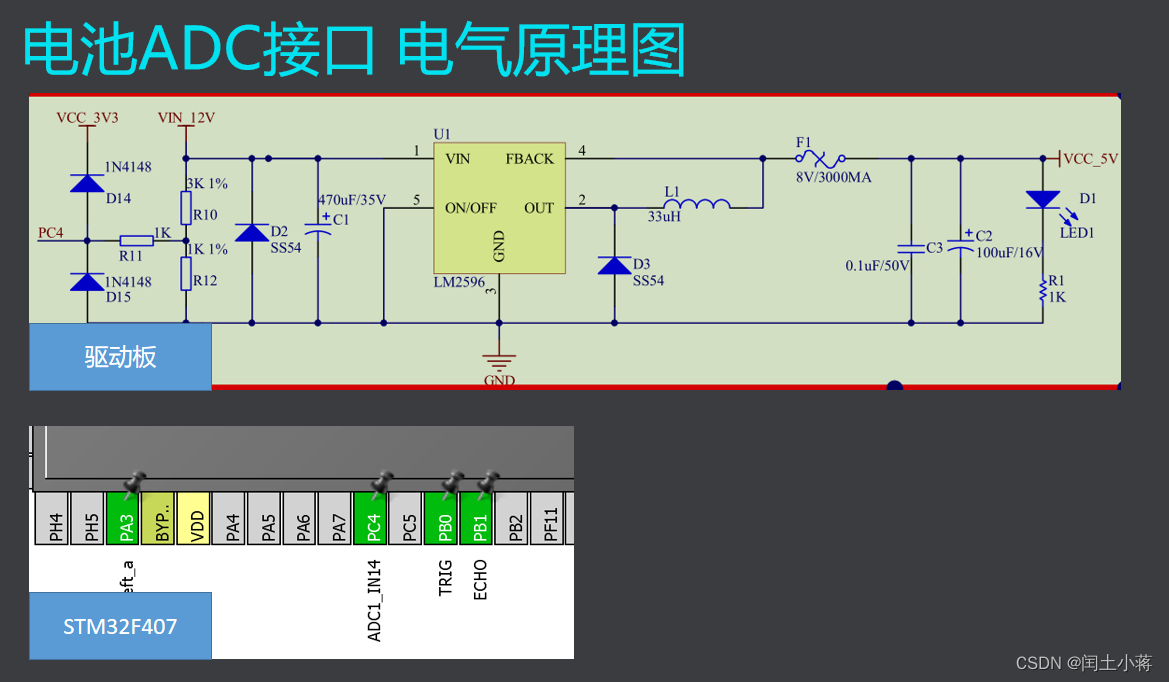
电池adc接口 电气原理图
开始配置工程
cube工程配置端口
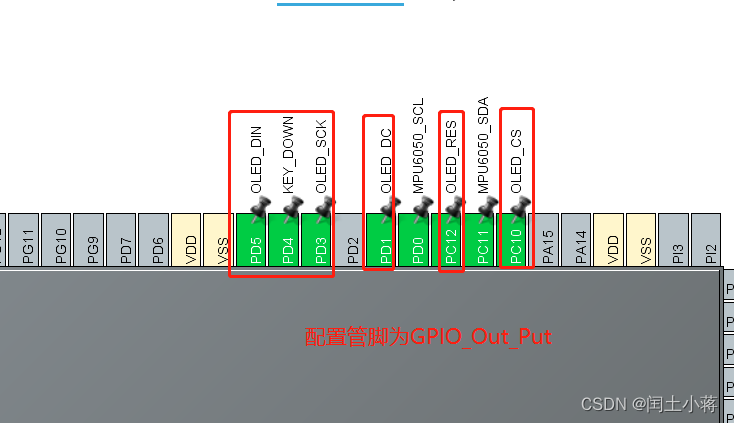
输出数据到oled 屏幕
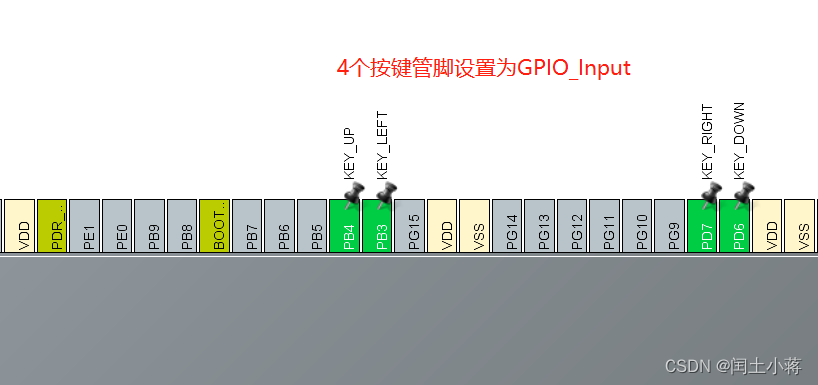
控制板需要接收按键按下电平,所以设置输入模式
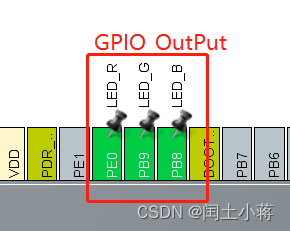
oled 管脚设置输出模式
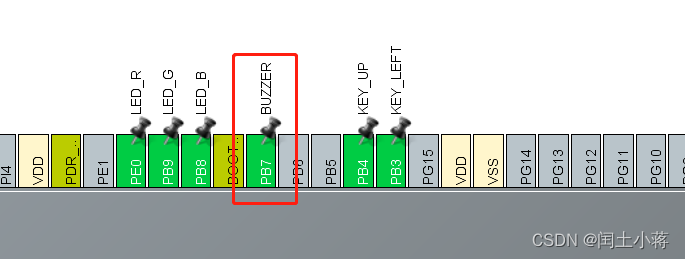
蜂鸣器一样设置输出模式
ok 导出工程打开keil5 开始编辑程序
四、stm32项目平衡车项目下载源码
本文章学习借鉴于创客学院团队,以表感谢。教学视频
资源是免费下载的,点击下载即可
上一节,stm32项目平衡车详解(stm32F407)上