大家在入门四旋翼飞行器数学模型时第一个遇到的就是坐标系的转换。这篇文章用尽量浅显的语言为大家讲解坐标系的转换的欧拉角。
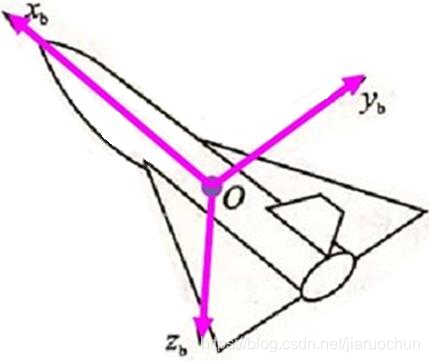
机体坐标系
原点O取在飞机质心处, Xb轴指向机头, ,Yb轴指向机身右方, Zb指向机身下方。
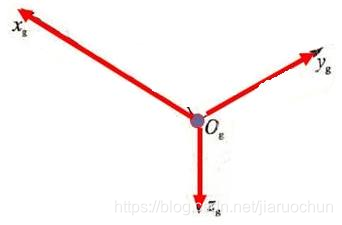
地面坐标系
在地面上选一点Og,使Xg轴在水平面内并指向某一方向,Zg轴垂直于地面并指向地心,Yg轴在水平面内垂直于Xg轴,是一个右手坐标系。
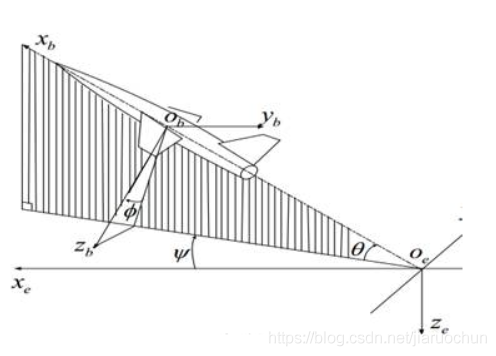
欧拉角
机体坐标系与地面惯性坐标系之间的夹角就是飞机的姿态角,又称欧拉角。
(1)俯仰角θ\thetaθ: 机体轴与地平面(水平面)之间的夹角,飞机抬头为正。
(2)偏航角(方位角)ψ\psiψ:机体轴在水平面上的投影与地轴之间的夹角,以机头右偏为正。
(3)滚转角(倾斜角)ϕ\phiϕ:飞机对称面绕机体轴 转过的角度,右滚为正。
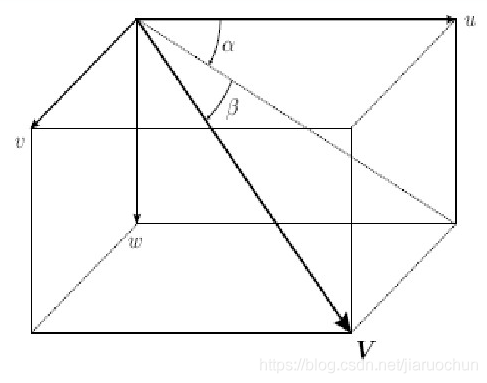
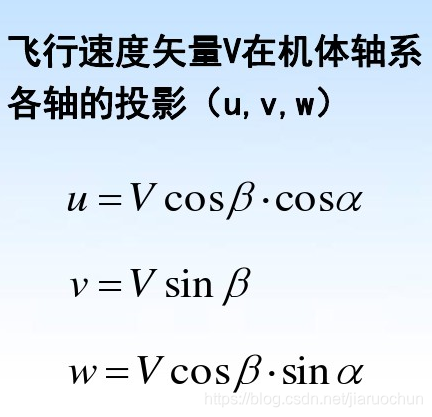
飞机速度分量
坐标系转换
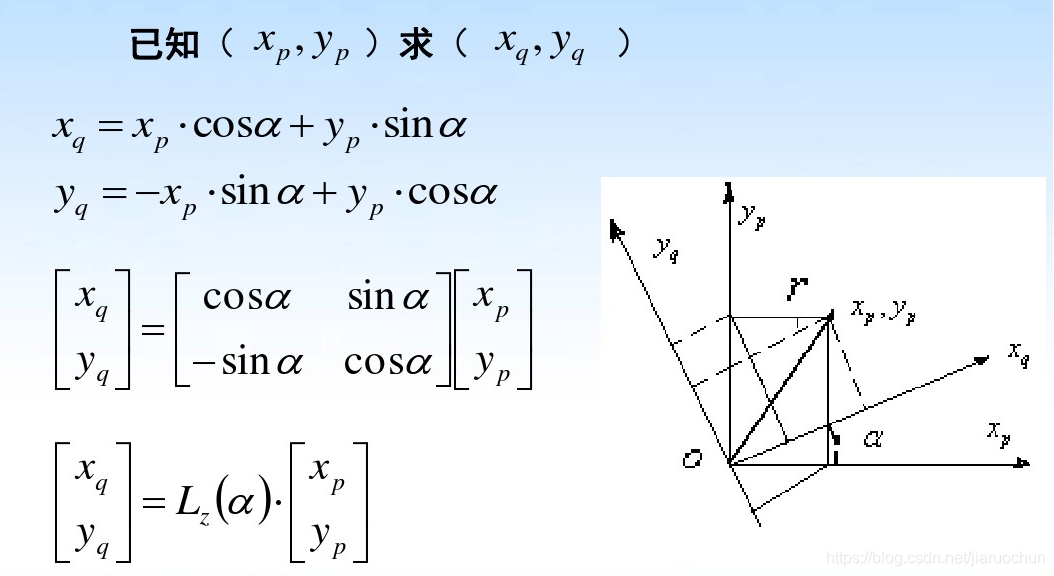
那么,三维坐标系的转换就有

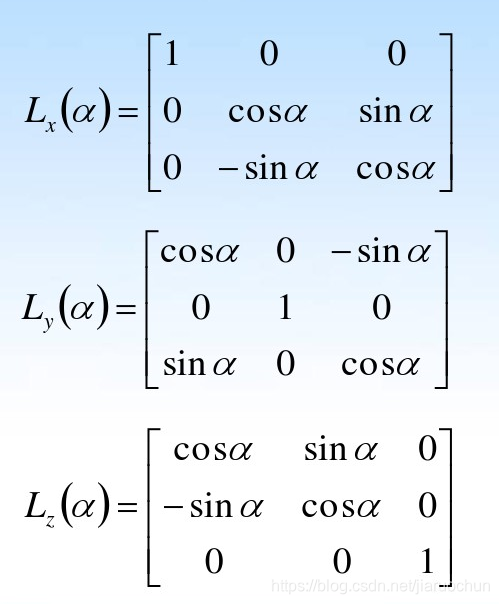
可以的到分别绕三个轴的转换矩阵为
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)