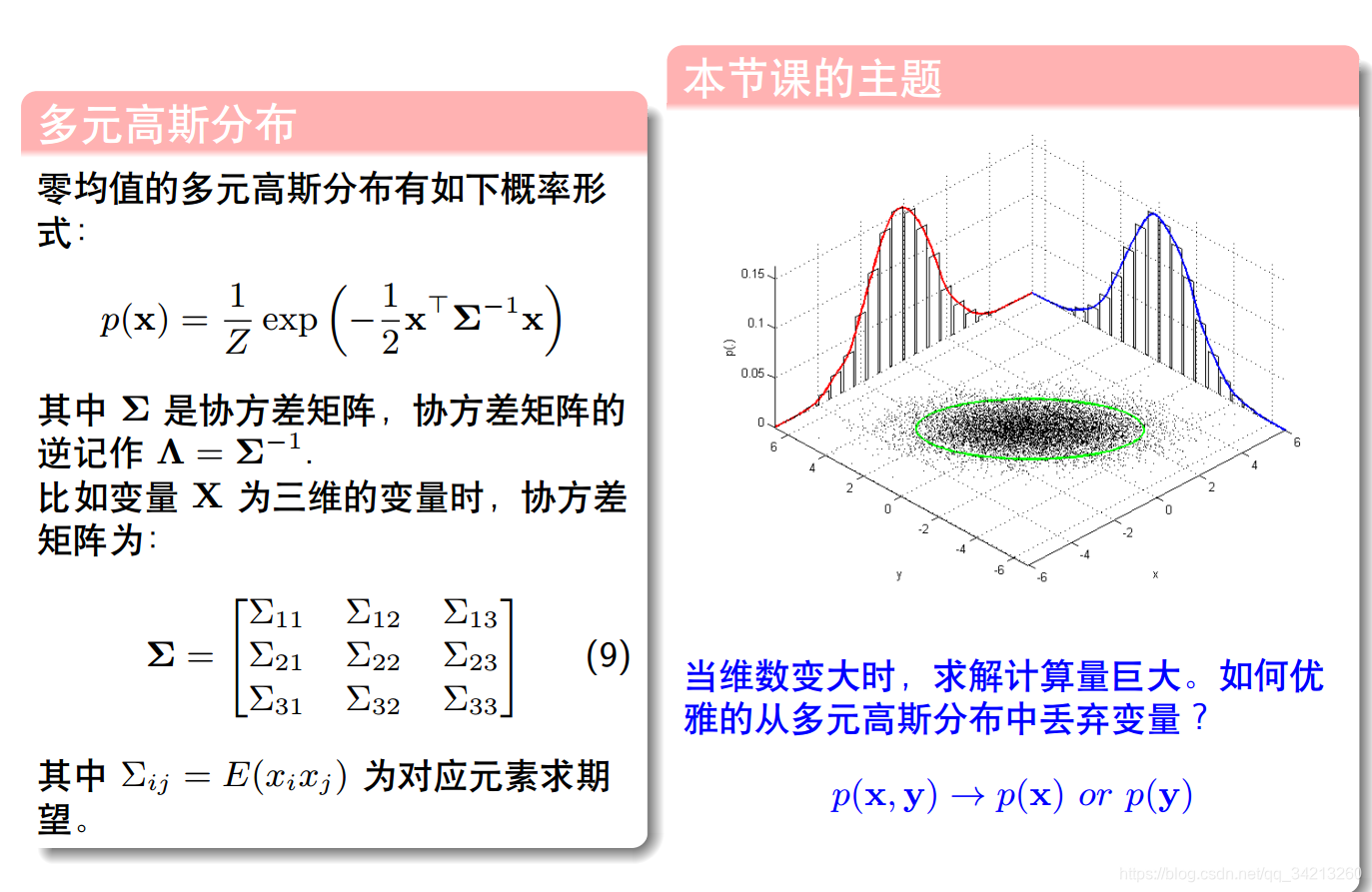
因为一般可以假设
x
i
和
x
j
x_{i}和 x_{j}
xi和xj是相互独立的:
Σ
i
j
=
E
(
x
i
x
j
)
=
E
(
x
i
)
E
(
x
j
)
=
(
x
−
u
)
T
(
x
−
u
)
\Sigma_{i j}=E\left(x_{i} x_{j}\right)=E(x_i)E(x_j)=(x-u)^T(x-u)
Σij=E(xixj)=E(xi)E(xj)=(x−u)T(x−u)
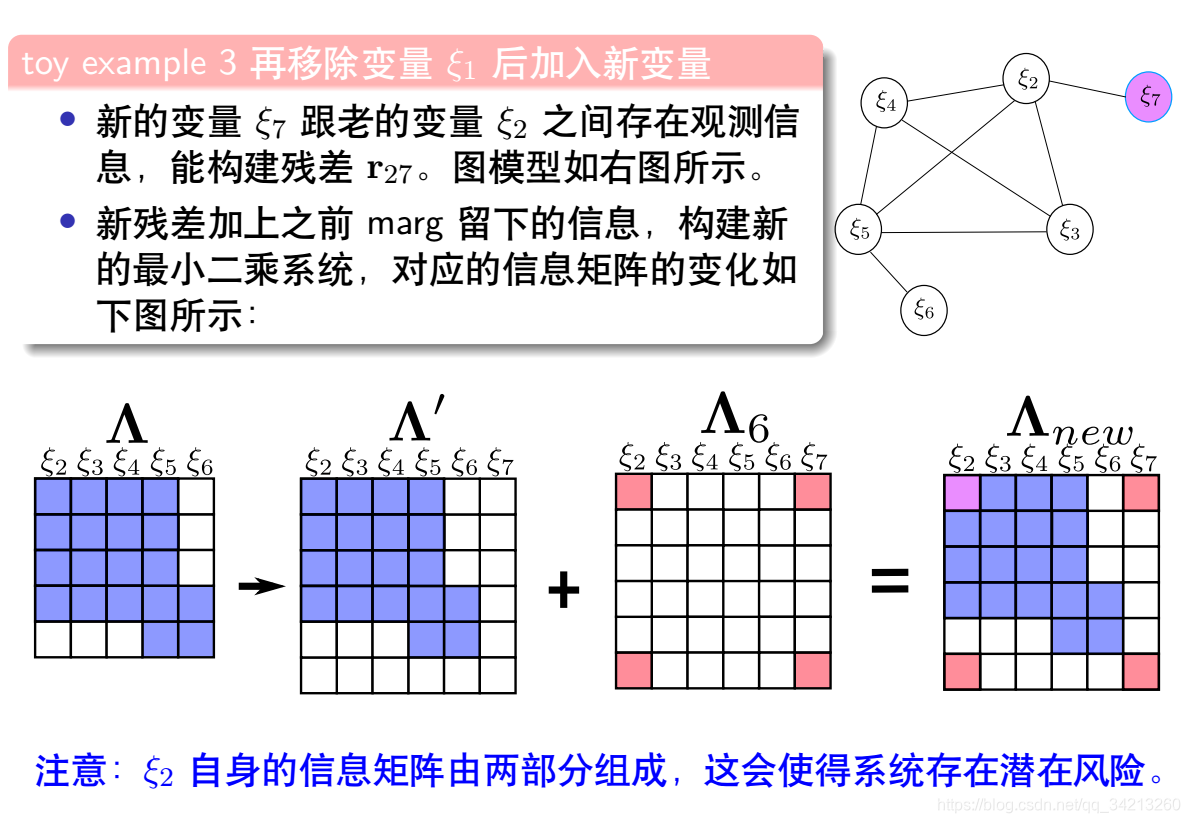
公式表示: 假设要被边缘化的状态是
δ
x
a
\delta x_a
δxa 因为在实际滑窗中
δ
x
a
\delta x_a
δxa的状态已经被移出去了,所以不会再产生约束,所以只展开矩阵第二行。 可以看到新的方程只和
δ
x
b
\delta x_b
δxb相关,但是
δ
x
a
\delta x_a
δxa的信息又被保留了下来。接下来只需把最后的公式重写分解成以下形式就又形成了常见后端中的边缘化约束
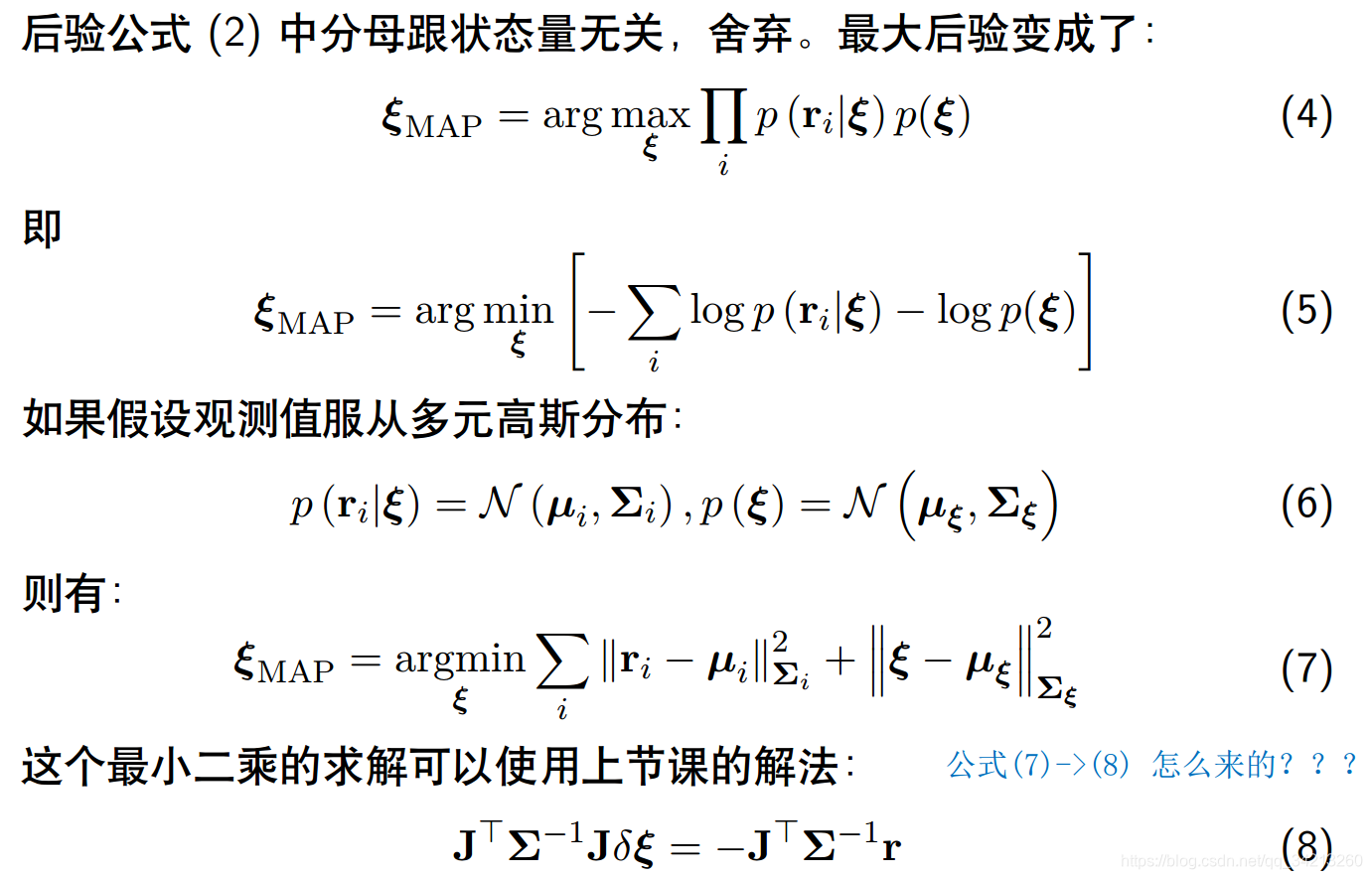
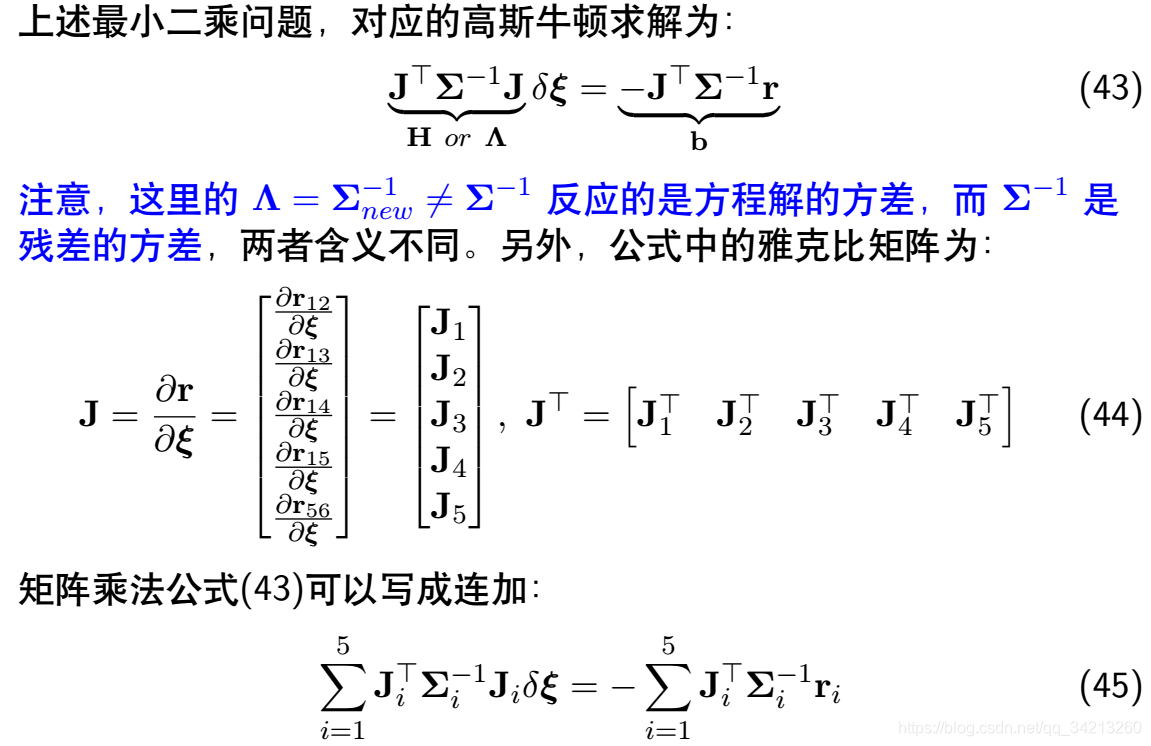
J
⊤
J
⏟
H
or
Λ
δ
ξ
=
−
J
⊤
r
⏟
b
\underbrace{\mathbf{J}^{\top} \mathbf{J}}_{\mathbf{H} \text { or } \boldsymbol{\Lambda}} \delta \boldsymbol{\xi}=\underbrace{-\mathbf{J}^{\top} \mathbf{r}}_{\mathbf{b}}
H or ΛJ⊤Jδξ=b−J⊤r 对H矩阵作特征值分解
H
=
V
Σ
V
T
H = V\Sigma V^T
H=VΣVT.
V
是
特
征
向
量
,
Σ
是
特
征
值
构
成
的
对
角
矩
阵
V是特征向量,\Sigma是特征值构成的对角矩阵
V是特征向量,Σ是特征值构成的对角矩阵 同时又
H
=
J
T
J
H = J^TJ
H=JTJ,所以
J
=
Σ
V
T
J = \sqrt{\Sigma}V^T
J=ΣVT 同理
r
=
−
(
J
T
)
−
1
∗
b
r = -(J^T)^{-1}*b
r=−(JT)−1∗b
 因为一般可以假设
因为一般可以假设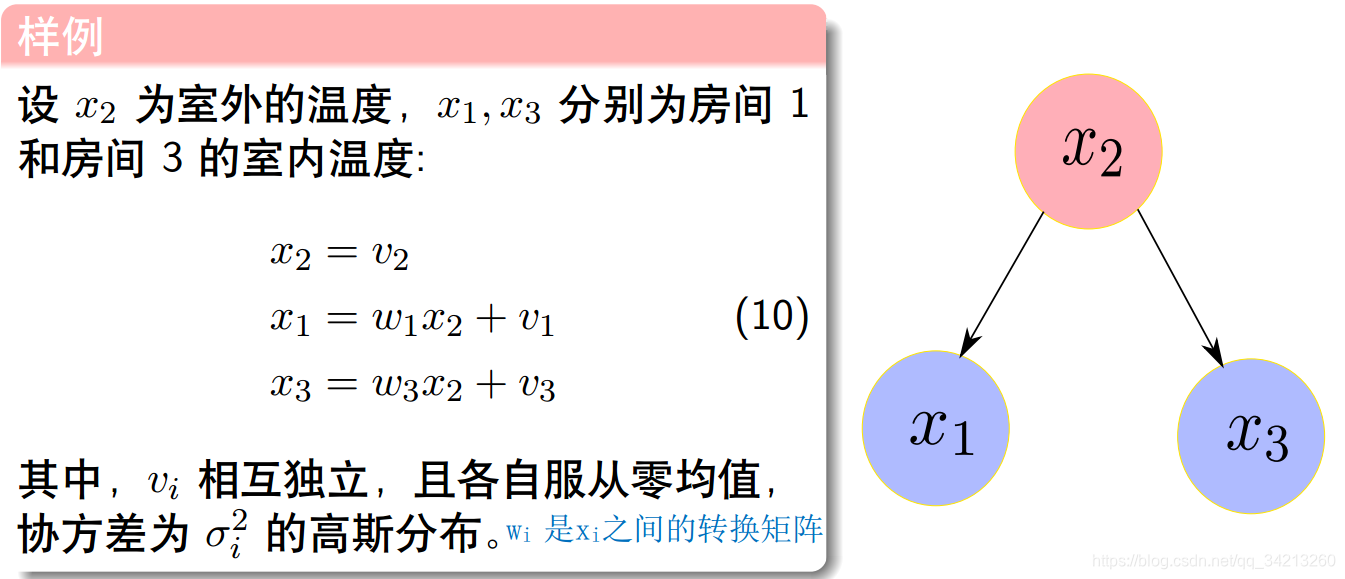



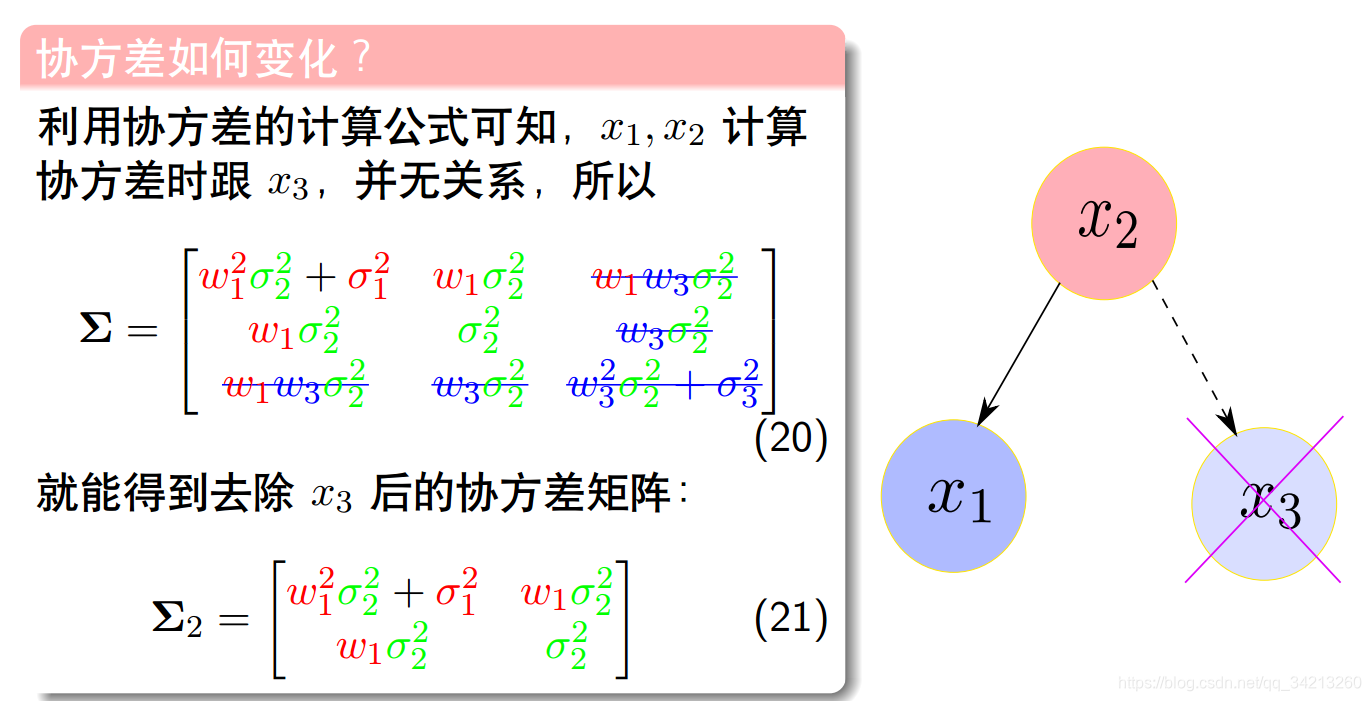
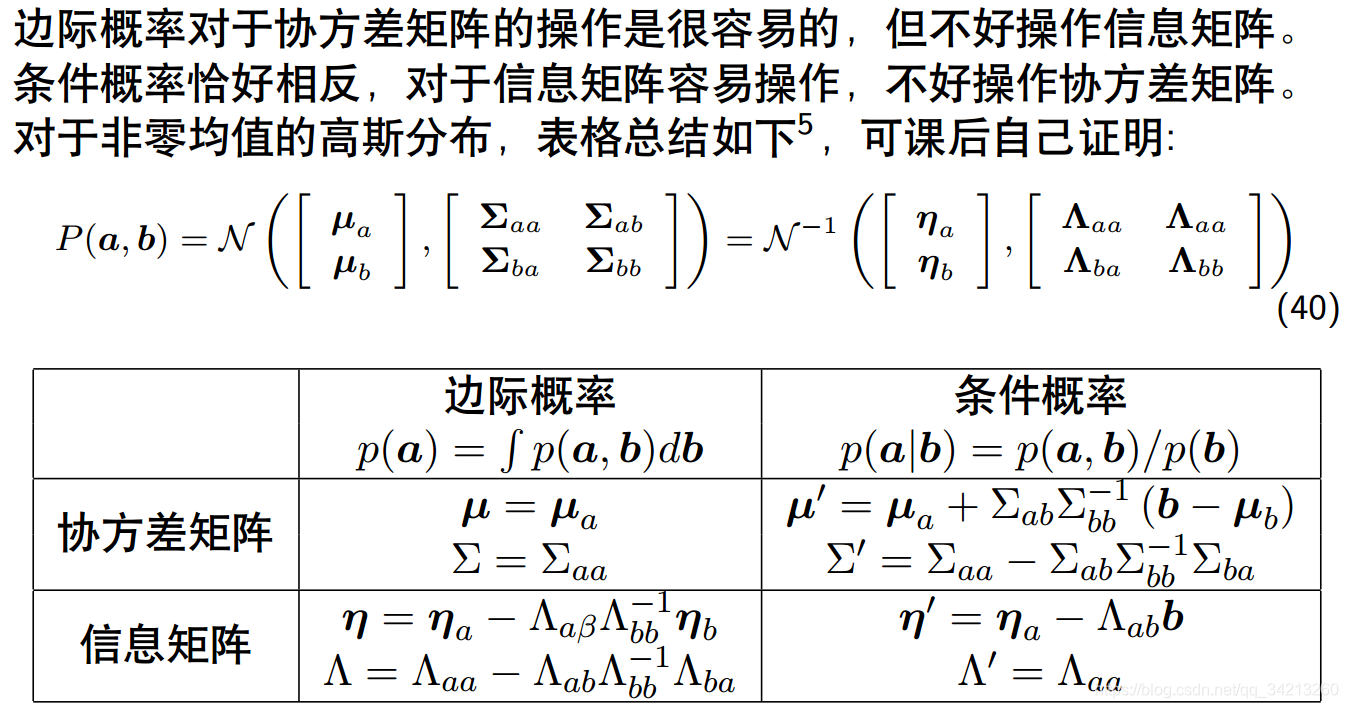
 因为实际过程中是协方差矩阵里面各个值是一个数,已经没有办法单独去掉某一部分。
因为实际过程中是协方差矩阵里面各个值是一个数,已经没有办法单独去掉某一部分。

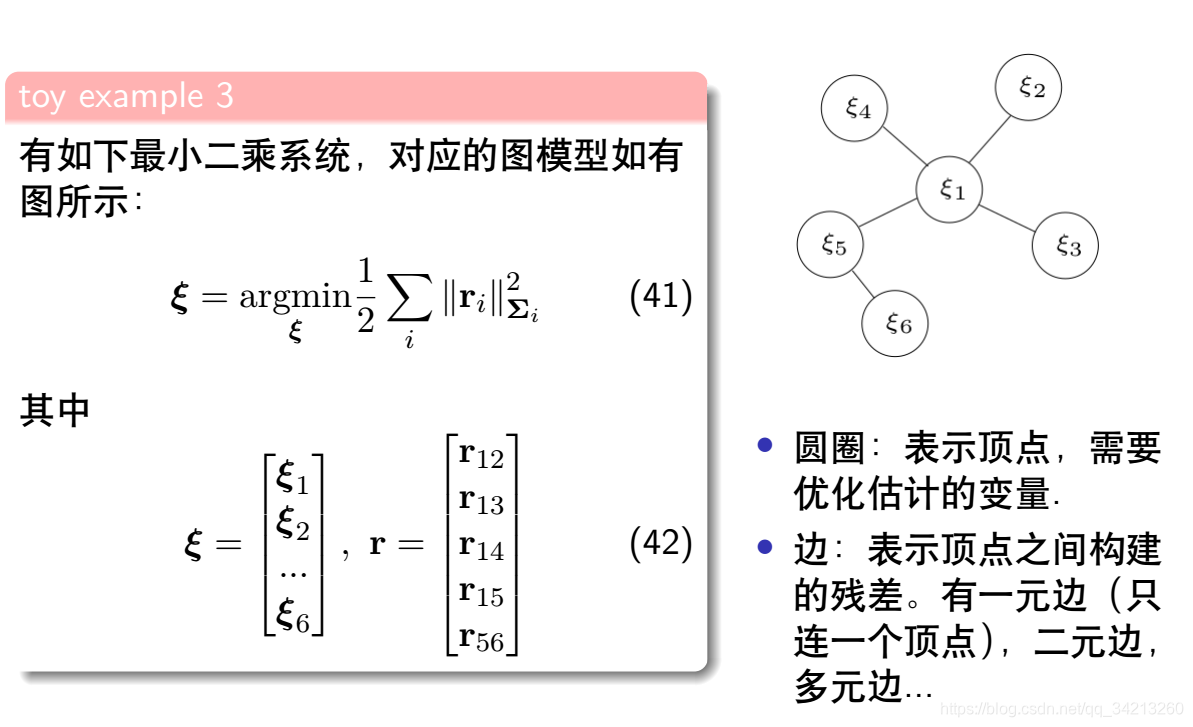
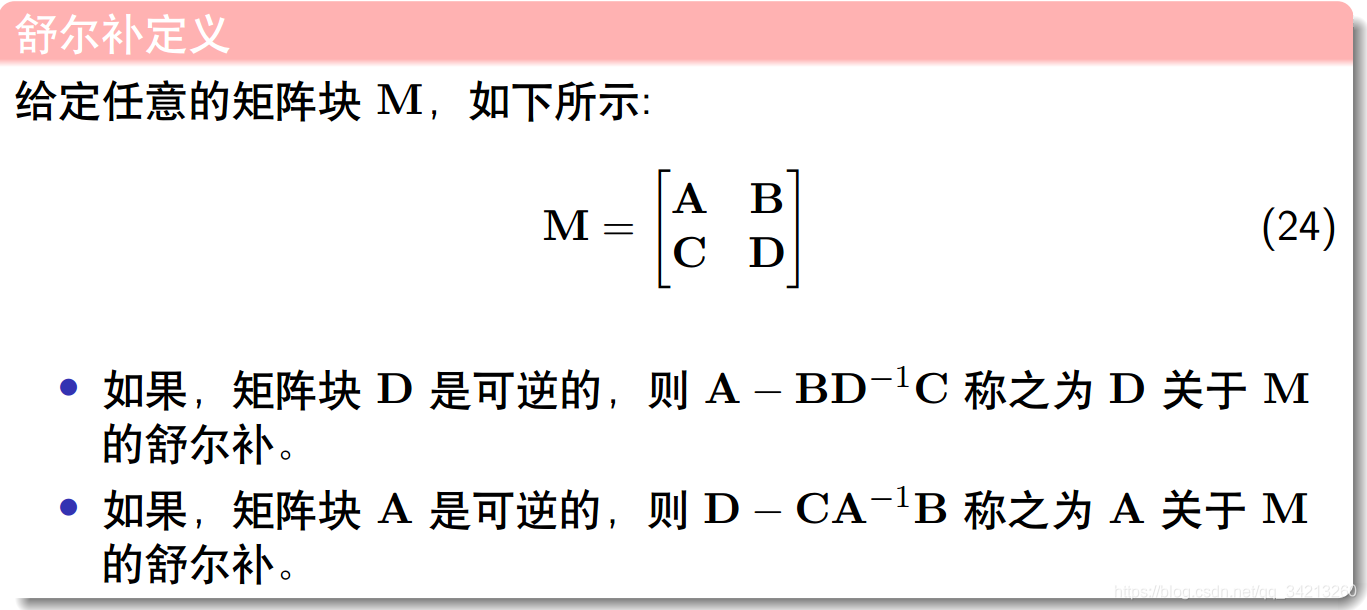 更多定义参见:
更多定义参见:


 公式表示:
公式表示:
 详细步骤如下:
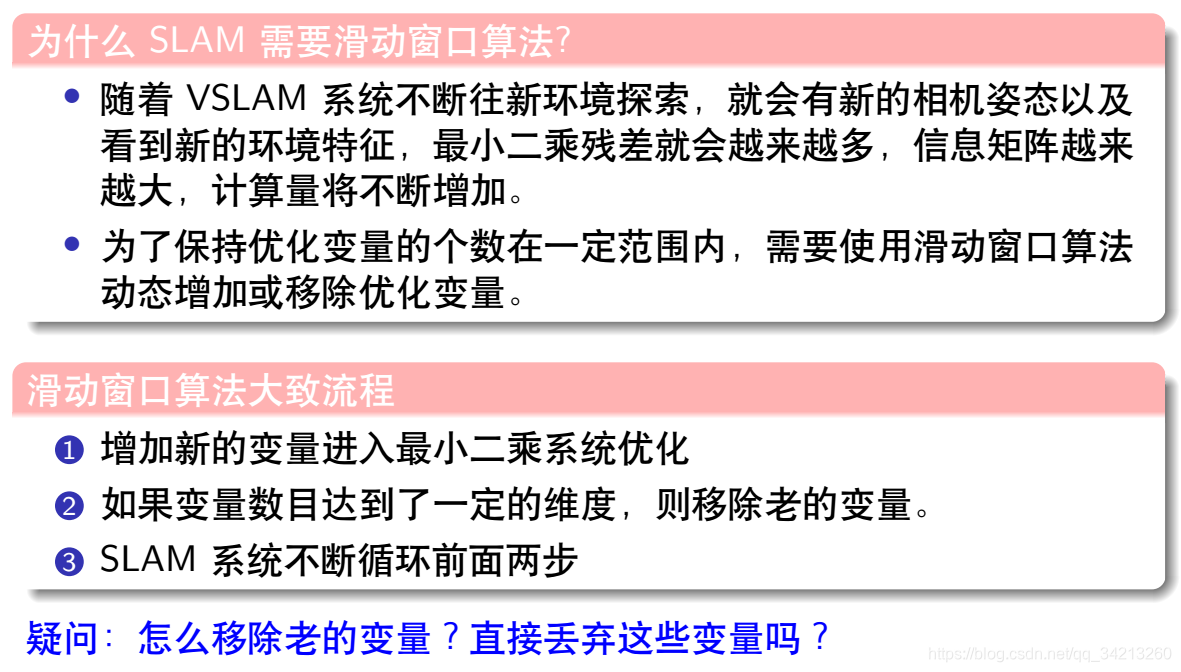
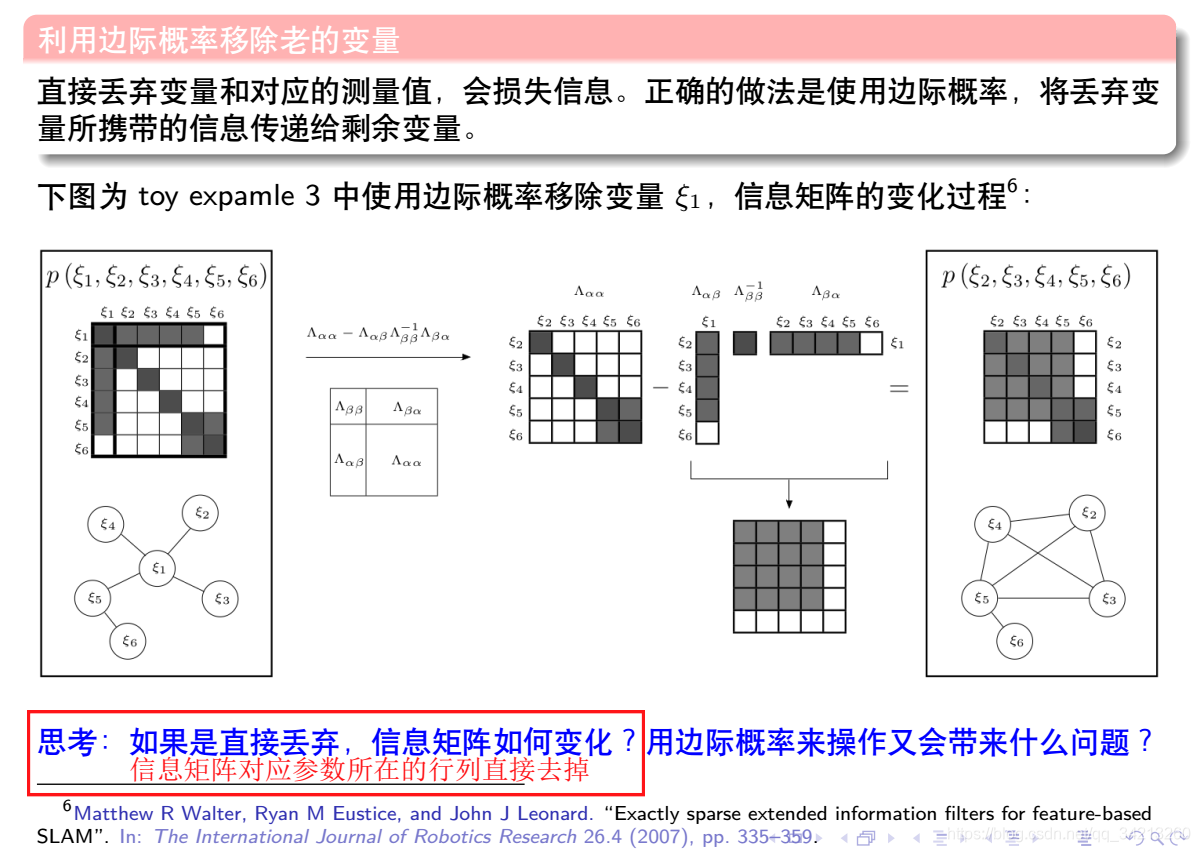
详细步骤如下: 如果边缘化掉pose1会发生什么?
如果边缘化掉pose1会发生什么?