Apollo课程
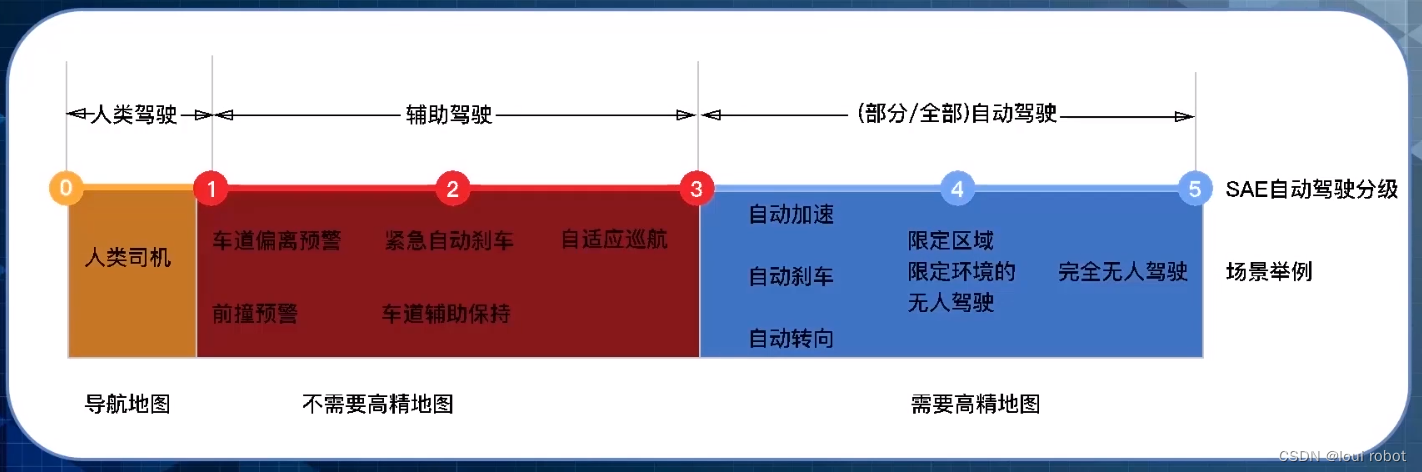
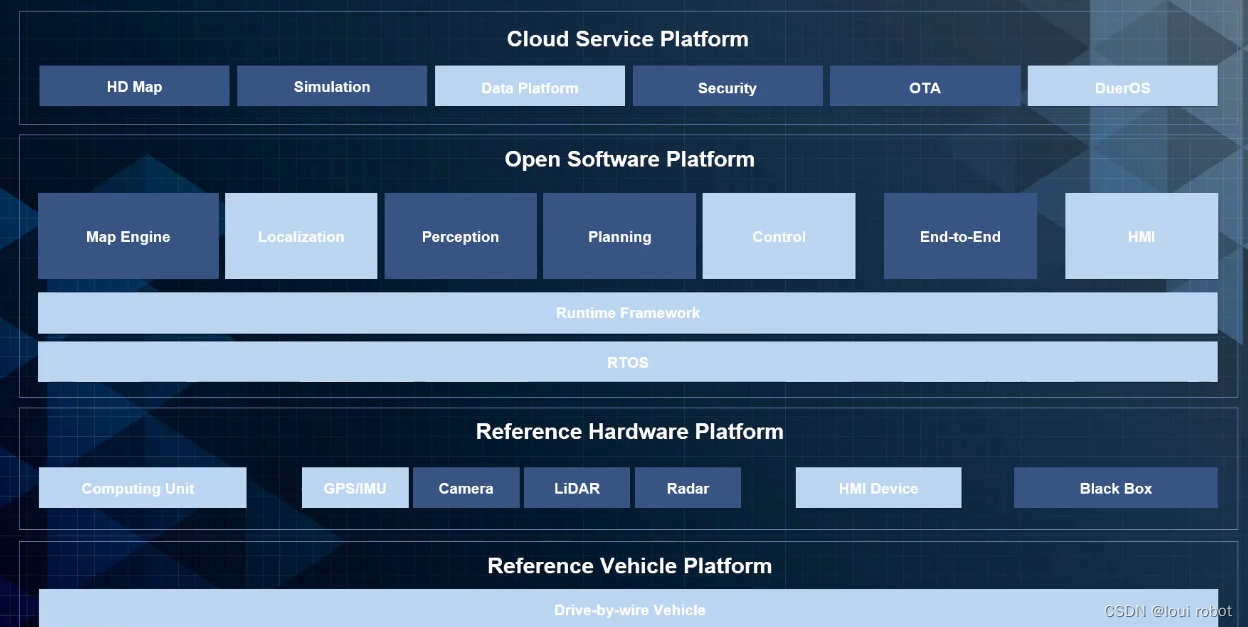
1、软件层分为三层: 实时操作系统(RTOS):确保在给定时间内完成特定任务,实时时确保系统稳定性、驾驶安全性的重要要求。通过在Ubuntu Linux操作系统加入Apollo内核,使其成为RTOS 运行时框架:ROS的定制版,改进了共享内存的功能和性能(一次写入多次读取)加快数据传输速度、去中心化和数据兼容性(ROS需要所有节点通信消息格式相同,当一个节点消息升级后,需要修改其他所有节点,比较麻烦,于是改进protobuf通信,在消息尾部加入新成员,不会影响各节点通信) 应用程序模块层:定位、感知、预测、规划、控制、人机接口等应用程序 2、云服务器的作用:高精地图、仿真、数据平台、安全、OTA和DuerOS智能语音系统
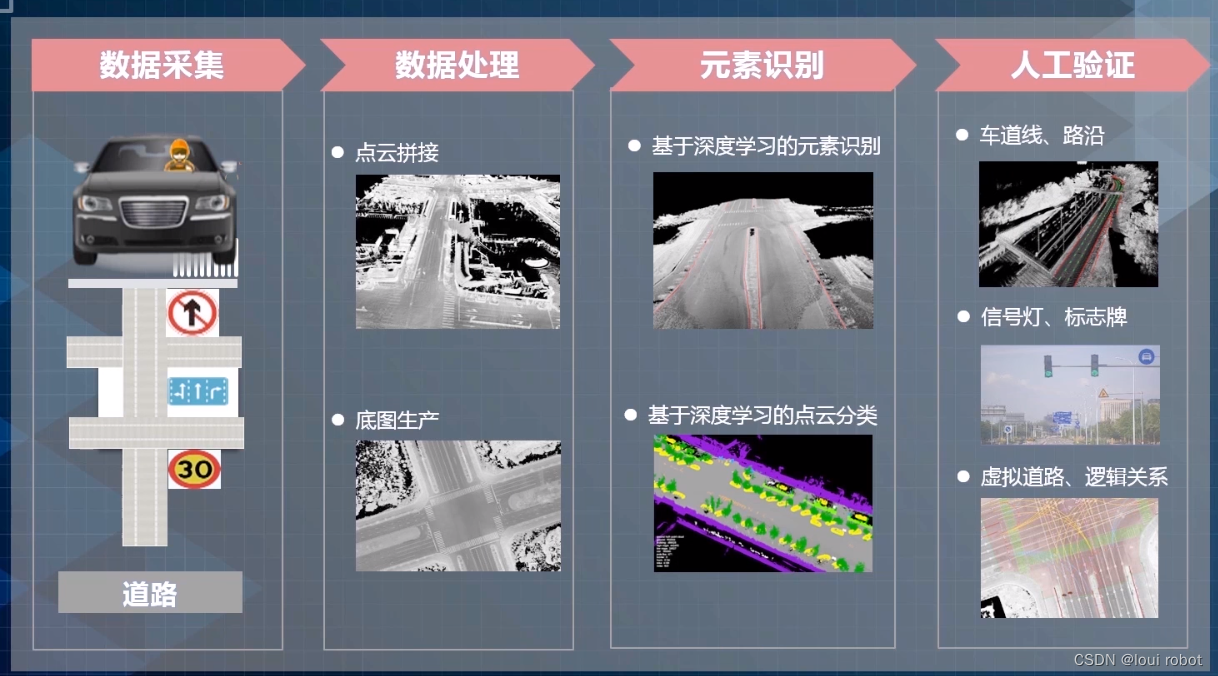
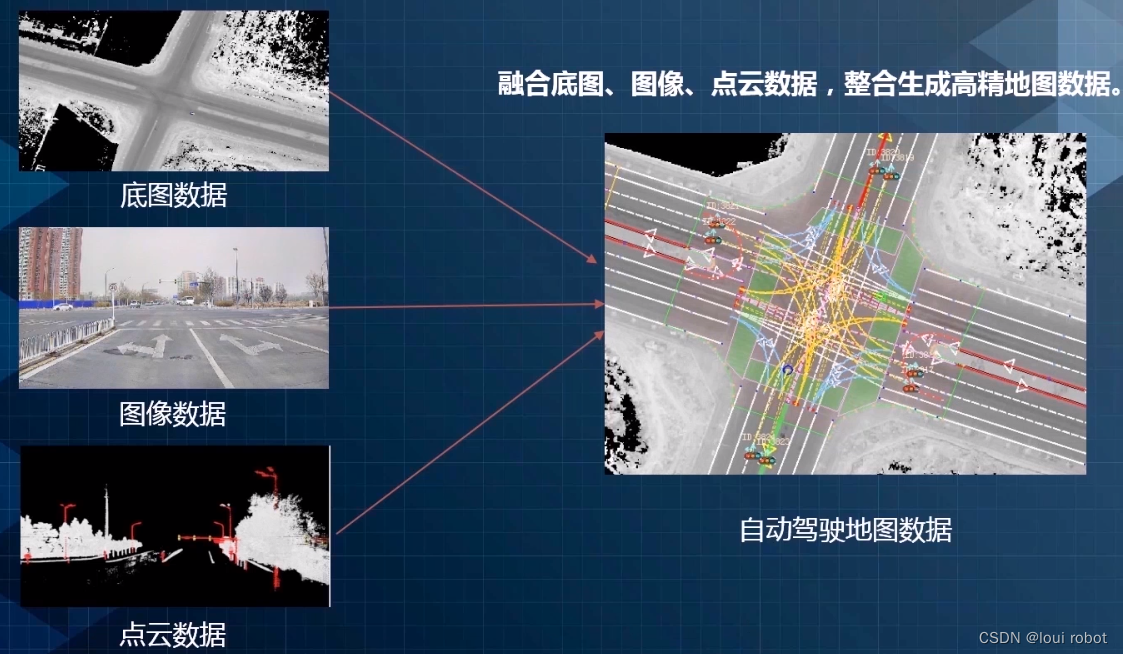
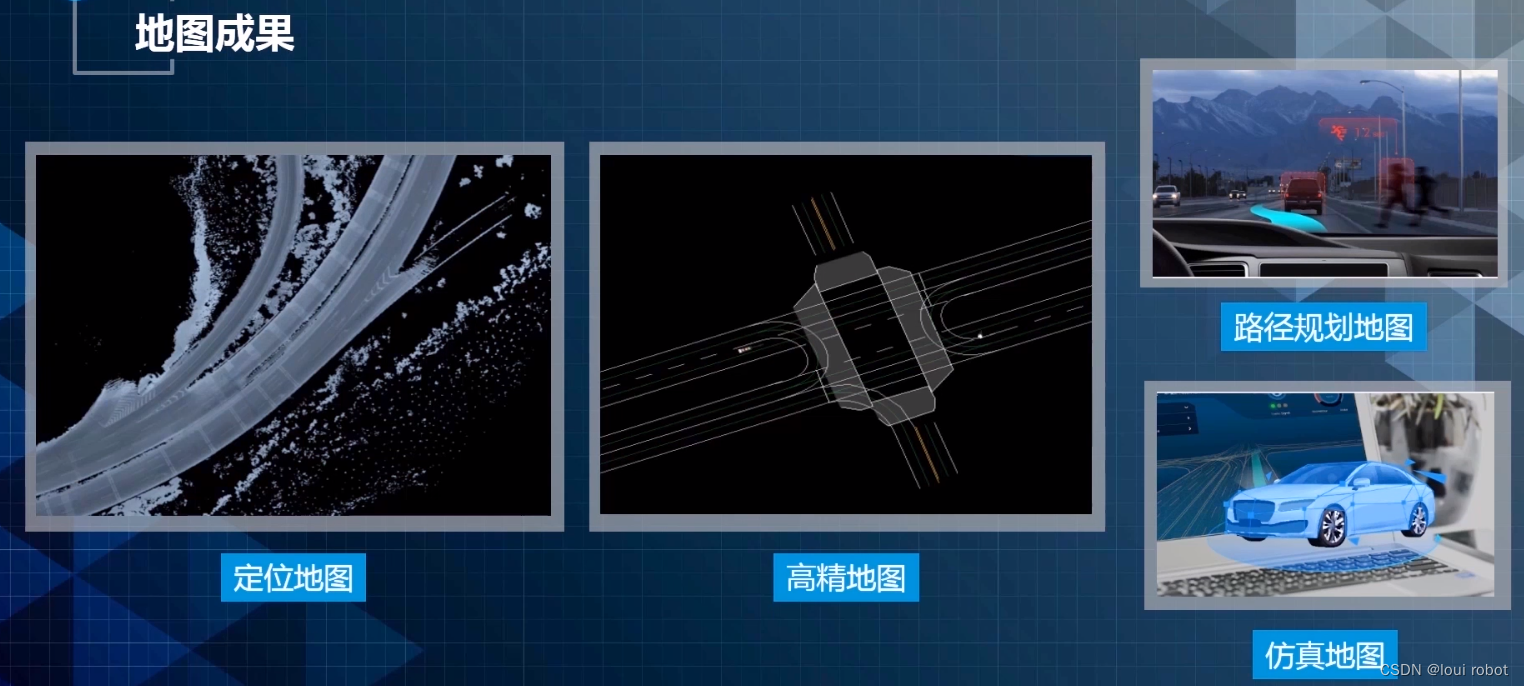
人通过知道自己大致位置,可以很快的识别行人、斑马线和红绿灯等信息,作出决策,但这对无人驾驶汽车比较有挑战性。需要借助包含大量驾驶辅助信息的高精地图, 1、地图:包括道路定义、交叉路口、交通信号、车道规则以及用于汽车导航的其他元素。如道路网的精确三维特征,交叉路口布局和左右转、斑马线等路标位置;语义信息,交通灯上不同颜色的含义、速度限制、左右转开始的位置。需达到厘米级精度。需要庞大车队绘制和更新地图,appollo已绘制了每条高速公路的地图,所有国道以及许多其他高等级公路,采用OpenDRIVE行业制图标准并进行改进,使其更使用无人驾驶,地图绘制流程实现90%自动化。 2、用于定位:通过当前传感器数据与高精地图匹配,确定当前位置。首先通过对各传感器数据进行预处理、坐标转换和数据融合,与地图路标匹配,预处理消除不准确或质量差的数据,坐标表换将不同视角数据转换为同一坐标系(利用外参转换到机体坐标系?),数据融合将各传感器数据合并,确定汽车在地图中位置 3、用于感知:各传感器受遮挡、天气等影响,只能观测一定范围物体,地图能记录遮挡物之后的物体,提前作出决策;可以告知各传感器重点探测区域,如知道红绿灯、停车路标等大致位置后,提高检测精度和速度。 4、用于规划和预测:规划汽车行车路径,预测其他车辆在将来的位置,如辅助识别精确的中间线,可以靠中间线行驶,提前感知低速限制、人行道或减速带等信息,预先减速,根据障碍物信息变道,规划路径 5、地图构建:构建和更新过程中使用众包,向公众发布其数据采集工具,以便任何人都可以参与制作高精地图的任务,可通过手机、智能信息娱乐系统甚至无人驾驶车来实现 数据采集:300辆车采集GPS、lidar、相机、IMU等数据,用于维护和更新,保证道路因为拆建等因素及时更新 数据处理:整理、分类和清洗以获得没有任何语义信息或注释的初始地图模板,包括点云地图等 物体检测:检测静态对象并分类,包括车道线、交通标志、电线杆 人工确认:确保自动构建正确进行并及时发现问题,使用软件辅助标记和编辑 地图发布:包括高精地图、自上而下的高精定位地图和三维点云地图
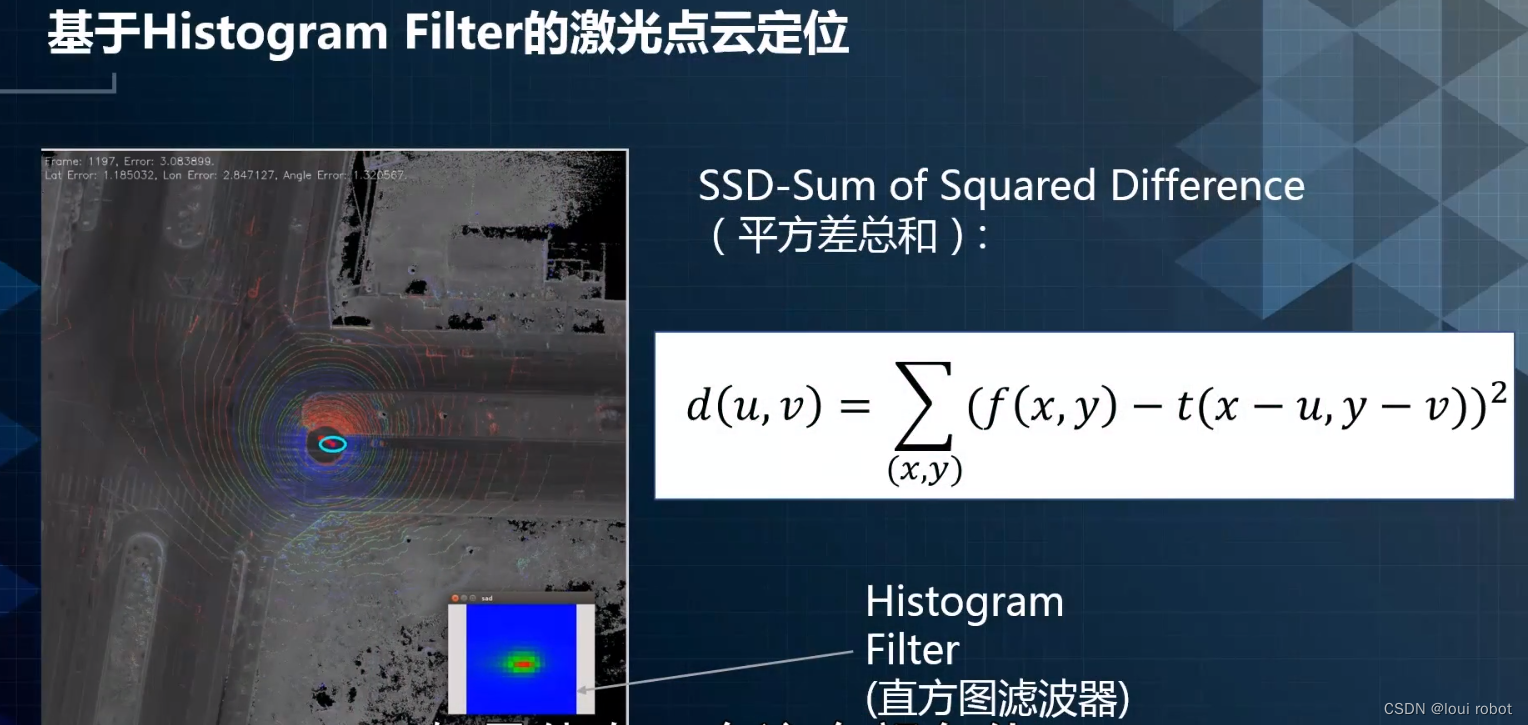
确定汽车在高精地图的位置,常用汽车传感器所见路标与地图路标比较,确定位置。Apollo基于GPS、IMU和lidar多传感器融合定位,GNSS定位输出位置和速度信息,lidar定位输出位置和行进方向信息,通过卡尔曼融合两者输出,惯性导航用于预测步,GNSS定位和lidar定位用于更新步 1、GNSS RTK:以GPS为例,其包括三部分: 卫星-有大约30颗卫星在离地面约2万公里外层空间运行 控制站:用于监视、控制卫星和验证GPS广播信号的精确度 GPS接收器:通过信号从卫星到接收器飞行时间乘光速计算距离(影响因素信号在不同介质传播速度有些差别,时间误差),至少需要检测到四颗卫星才能定位。由于光速很大,少量时间误差也会引起巨大误差,每颗卫星配备高精度的原子钟(两个时间怎么同步?),RTK利用地面基站得到更准确位置,基站已知自己精确位置,也通过卫星测量位置,从而得到测量误差,用于调整接收器位置,得到更精确的定位。手机GPS一般精度1-3m,被高楼、山脉等遮挡时只有10-50m,RTK可到达10厘米以内精度(要求附近16公里范围内有基站),有遮挡时定位精度也会降低,GPS的更新频率较低,为10HZ左右,较难满足快速运动汽车需求 2、惯性导航:已知初始位置后,通过IMU测得加速度和角速度定位,优点是更新频率可达到1000HZ,但长时间漂移较大。 3、激光雷达定位:使用点云匹配算法将当前激光雷达点云数据和高精地图进行匹配,得到初始位姿。优点是定位精度高,难点是高精度构建难度大,动态物体会影响匹配精度。点云匹配方法包括: ICP:迭代最近点匹配 滤波算法:可去除冗余信息。卡尔曼滤波 直方图滤波算法:(Apollo使用,也叫SSD误差平方和算法SSD)。SSD方法通过传感器扫描的点云滑过地图上的每个位置,在每个位置计算扫描点与地图上的对应点之间的误差或距离,求误差的平方和,平方和越小匹配越好,寻找平方和误差最小的方法。 4、视觉定位:通过粒子滤波定位,可用匹配方法确定在车道线位置,数据易获取,但缺乏三维信息、不便利用三维地图
Apollo可感知障碍物、交通灯和车道等物体,对于三维对象检测,在高精地图上使用感兴趣区域重点关注相关对象,将ROI过滤器应用于点云和图像数据,以缩小搜索范围并加快感知, 然后将已过滤得三维点云输入检测网络构建三维边界框,最后使用检测跟踪关联的算法,跨时间步识别单个对象(分类),该算法先保留每个时间步对象列表,再在下一个时间步找到每个对象的最佳匹配。对于交通灯灯等静态物体,先使用高精地图来确定前方是否存在交通信号灯,若有,返回信号灯位置,使用图像检测网络对灯进行定位,从灯较大的图裁剪信号灯,使用分类网络确定灯颜色,如果有多个灯,需要确定灯与车道的关联关系。使用YOLO检测车道线和动态物体,最后通过融合多传感器数据得到虚拟车道数据结构,融合其他传感器检测每个对象类型、位置、速度和前进方向,虚拟车道和动态对象传到规划与控制模块进行决策。
1、感知任务: 检测:找出物体在环境中的位置 分类:指明对象是什么,如路标分类器用于识别停车、让路和限速等标志。处理步骤输入图像、预处理(图像缩放、旋转、颜色空间变换等,更快处理和学习)、特征、分类模型 跟踪:随时间的推移观察移动物体 ,如行人、车辆等 语义分割:将图像中的每个像素与语义类别进行匹配,如道路、车辆和天空 2、感知世界的包括摄像头和激光雷达图像数据 3、神经网络:前馈、误差测定和反向传播 4、卷积神经网络:第一个卷积层识别基本边缘和颜色信息,第二层归纳更复杂的结构,如车轮、车门和挡风玻璃,第三层识别物体,最后进行分类 5、检测与分类:,动态障碍物,如首先考虑障碍物检测和分类,分为静态障碍物,如建筑物、树木、杆子,动态障碍物,如行人、自行车和各种车辆。首先需要知道它们位置,然后分类。可使用CNN先检测位置,再用另一个CNN分类;也可以用一个CNN进行检测和分类,如R-CNN、Fast R-CNN。 6、跟踪:跟踪可以解决遮挡问题,还可以保留障碍物身份,找出帧间物体对应关系。跟踪第一步通过查找特征相似度最高的对象进行匹配,由于相邻两帧物体速度相近,也可以根据速度辅助匹配 7、分割:对图像每个像素进行分类,并确定车辆可驾驶区域,语义分割常用全卷积网络(FCN),其输出层也是卷积网络。为了分割图像,输出图像和原始图像尺寸得一样,可通过上采样恢复尺寸,可分为编码器和解码器两部分 8、三种传感器优缺点:摄像头优势在分类,主要用于交通信号灯和车道检测,激光雷达在于检测障碍物,即使在夜间也能工作,但其为纳米波绕不过雨雪冰雹等,雷达在探测范围和应对恶劣天气方面占优势,雷达为毫米波,可以绕过毫米级障碍物。
9、Apollo使用激光雷达和雷达通过卡尔曼滤波融合检测障碍物,
预测其他物体的运动轨迹,如其他车辆变道、下匝道等,为规划和控制提供决策信息。对实时性、准确性。分为基于模型和基于数据驱动的预测。预测和感知输出的区别是预测了更长得运动轨迹。 1、基于模型方法:先用不同模型作为车辆可能路径,再通过后续信息确定车辆更符合哪个模型,优点是直观,可以结合物理知识、交通规则等信息 2、基于数据驱动预测:使用机器学习算法训练模型 3、基于车道序列预测:将车道分为不同区域,预测车辆在车道如何转换,组成有限模式组合,作为车道序列 4、障碍物状态:结合车辆位置、朝向、速度、加速度和与车道线距离预测车辆轨迹 5、预测目标车道:Apollo使用RNN建立一个模型来预测车辆的目标车道 6、轨迹生成:预测目标车道序列后,最后生成预测轨迹
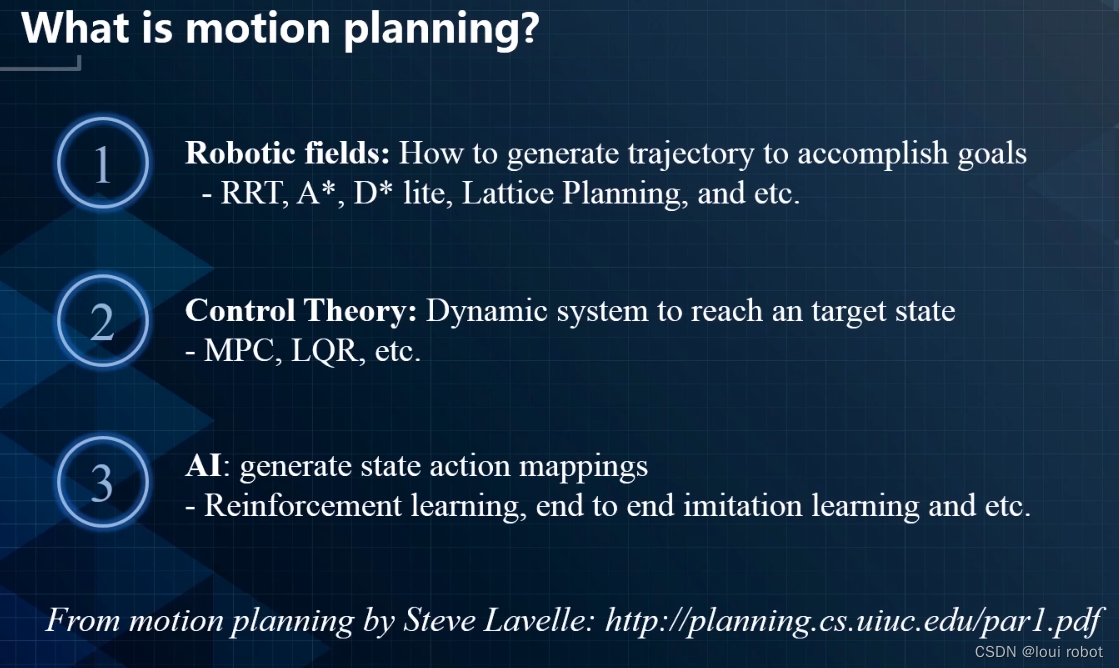
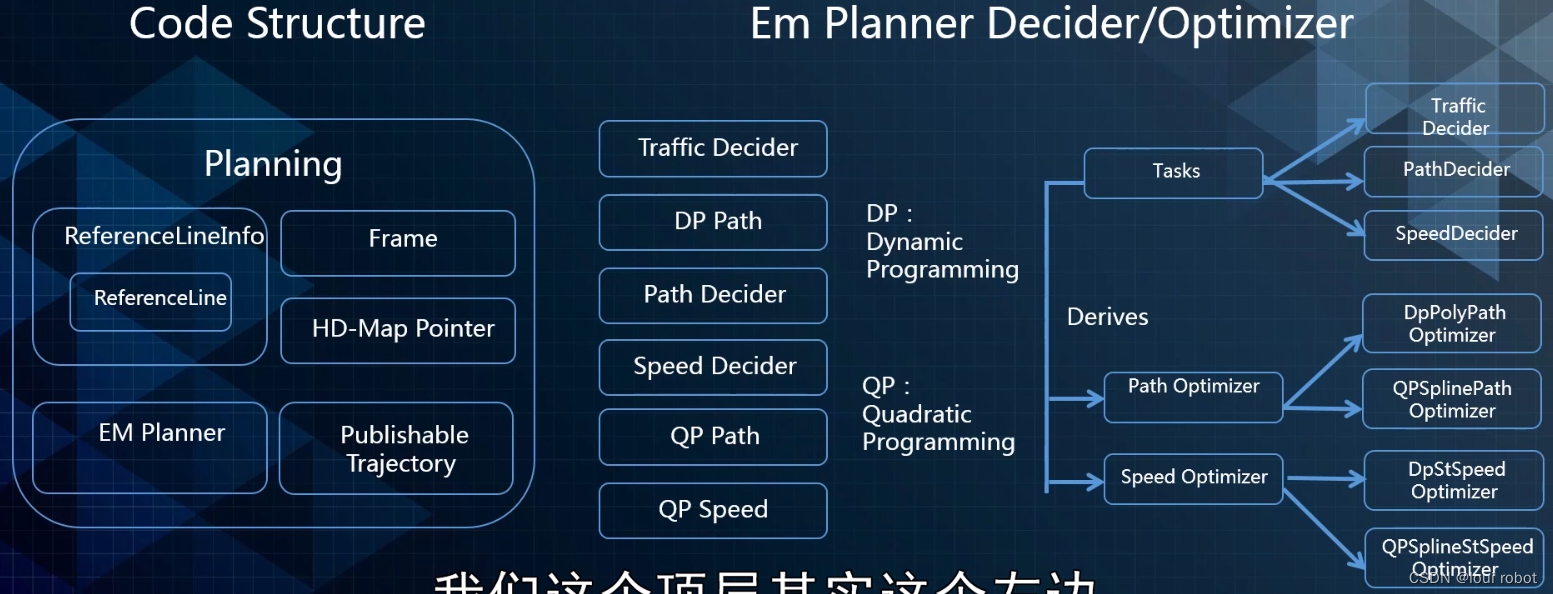
第一步是路线规划,生成免碰撞和舒适的可执行轨迹,由一系列点定义,每个点都有一个关联速度和指示何时应抵达那个点的时间戳。输入高精地图、当前在地图上位置、目的地位置,输出点到点的路径(路由,全局规划)和汽车执行何种水平的轨迹(局部规划),是时间曲线,包括速度信息 1、Apollo通过搜索规划点到点路径,将路段作为节点,边作为节点连接线。拐弯比直行成本高 2、全局规划:A*是一种经典搜索算法,用于规划全局路径 3、局部规划:生成由一系列包含2D位置(速度)和时间戳的点组成,与预测时间结合,确保按计划通过 4、评价轨迹:与障碍物距离、乘客舒适(平滑)、符合汽车运动模型、符合法律法规、曲率。通过成本函数选出最佳路径 5、规划时使用Frenet坐标系,描述车辆相对道路的位置,s代表沿道路的距离,为纵坐标,d表示与横向向线的位移,为横坐标,表示偏离中心线距离,两者相互垂直 6、路径和速度解耦规划:分为路径规划和速度规划,首先生成可性的候选路径,使用成本函数对每条曲线进行评估,选择成本最低路径;然后,确定行进速度, 7、生成候选路径:首先将道路分成单元格,然后对单元格中点进行随机采样,每个单元格选一个点,连接生成路径 8、确定速度:ST图,s纵向位移,t表示时间,通过斜率得到速度。根据成本函数确定最佳速度 9、二次规划:使用优化包将路径平滑 10、lattice轨迹生成方法:分别建立ST和SL轨迹(横坐标)。巡航、跟随和停止。根据两个图可以将其转换到笛卡尔坐标系
控制器输入一系列路径点来接收规划模块的轨迹和车辆当前状态(定位、车辆内部传感器数据:速度、转向和加速度),通过两者偏差,控制汽车沿路径点移动。控制器输出转向、加速和制动。准确、安全性、可行性和舒适度,即使路滑等情况也要准确规划路径。Apollo实现的三种控制策略:PID、线性二次调节器(LQR)、模型预测控制(MPC) 1、PID:偏差为偏离目标轨迹距离,优点是简单 2、LQR:基于模型的控制器,使车辆的状态误差最小化,使用LQR作横向控制,包括四个组件:横向误差及其变化率,朝向误差及其变化率。控制输入:转向、加速和制动 3、MPC:依赖数学优化,分为三步:建立车辆模型;使用优化引擎计算有限时间范围内的控制输入;执行第一组输入。不断重新评估。模型、约束和成本函数作为优化问题解决。MPC考虑了车辆模型,比PID更精确,适合不同的成本函数,缺点是更复杂、更缓慢和更难以实现。但在无人驾驶中比较常用
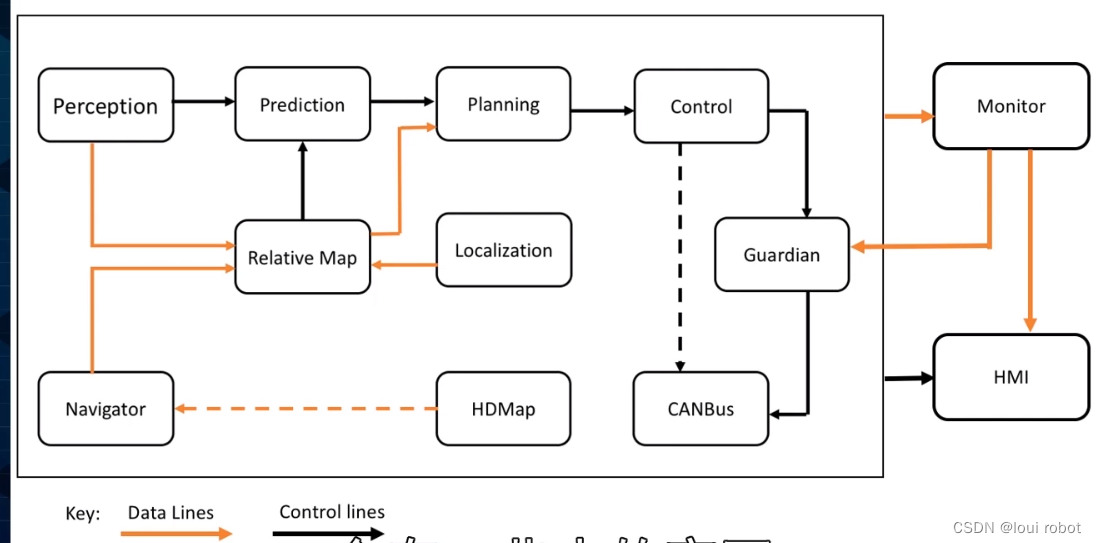
轨迹一般最多做到5阶平滑,加速度倒数和踩油门的频率有关,决定有没有推背感,abs不停的点刹,防止车漂移。可见光波长380-780nm,激光雷达是905nm和可见光离得比较近,功率比较大,避免伤害人眼,1550nm可以做大功率,功率越大测得距离越远 Apollo框架:云端、软件层、硬件层、线控控
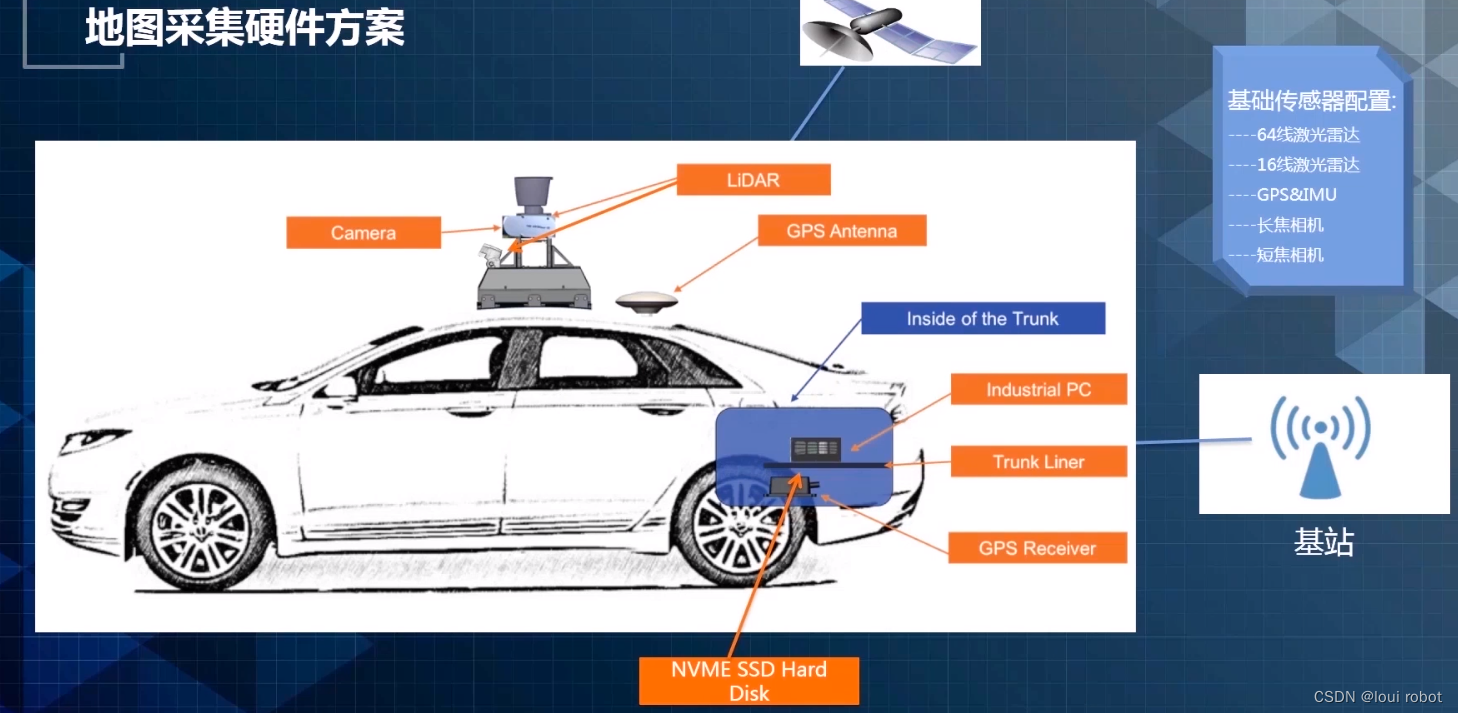
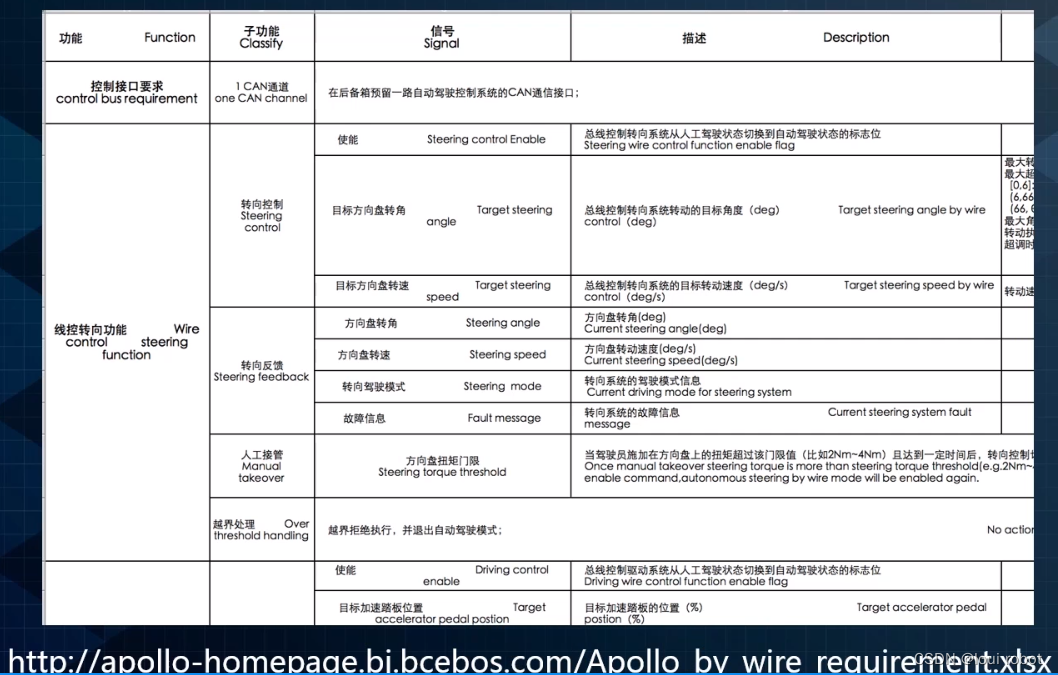
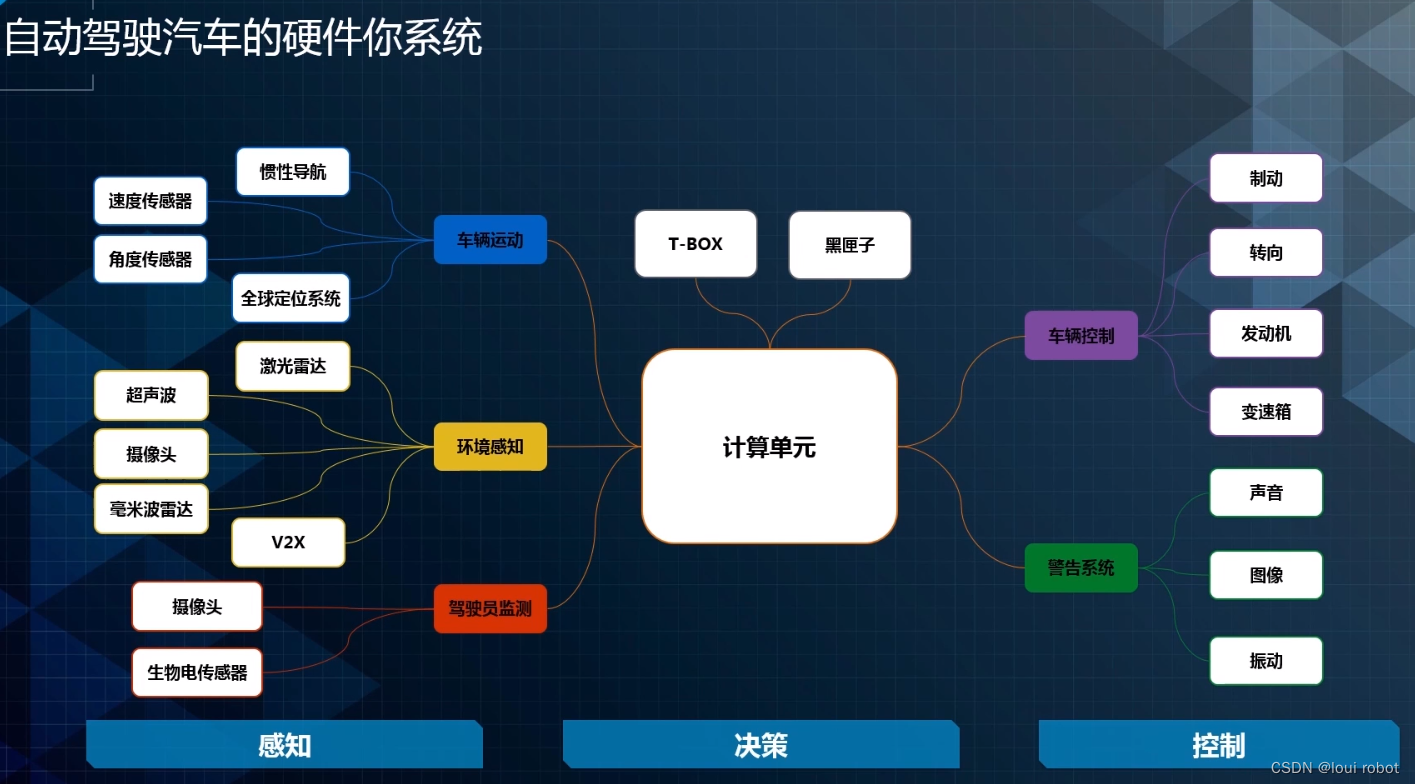
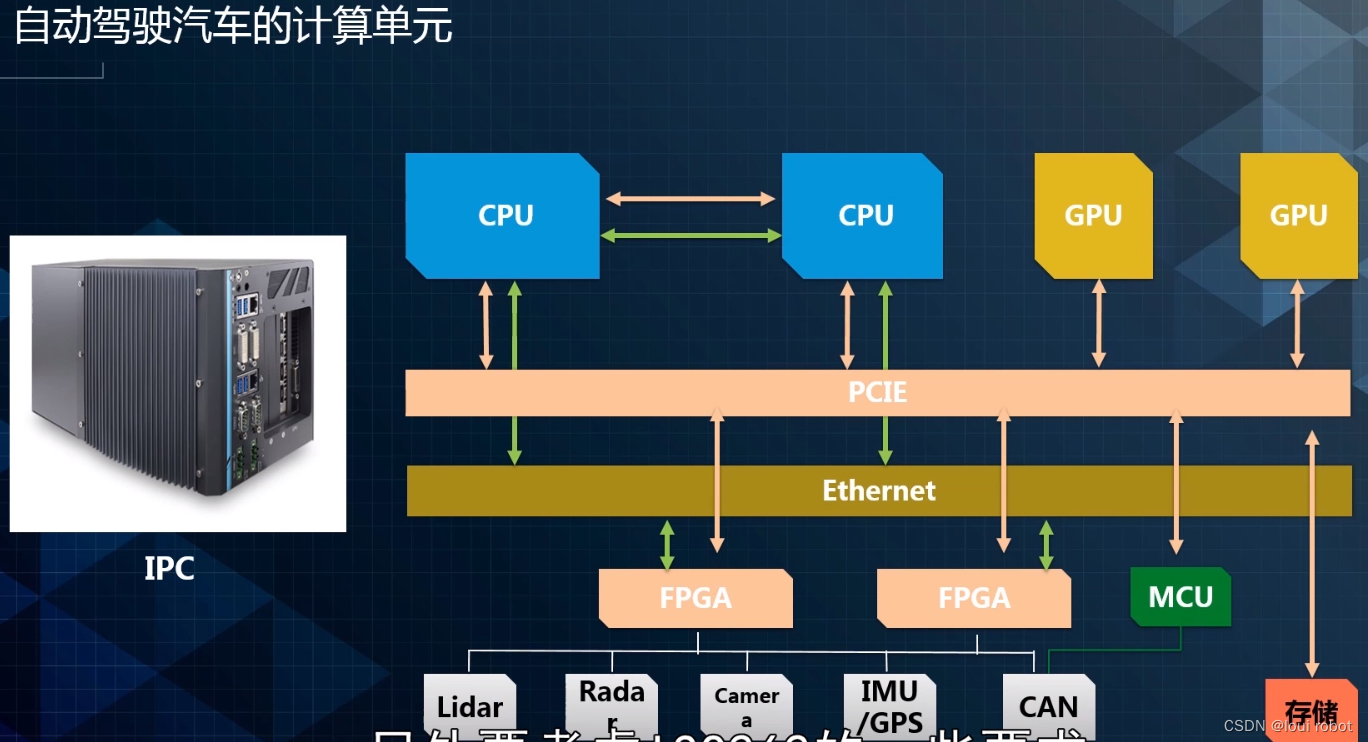
1.Uber出现事故原因:系统未闭环(碰撞前6s传感器发现行人,前1s原车开始制动,因为改装后并没用原车发送刹车指令,造成制动机构未动作)、交互设计缺陷(车辆未提醒驾驶员)、路面照明不足、不符合车规(车体重心较高,容易侧翻) 2.研发流程:软件在环(基于模拟器仿真)、硬件在环(基于必要的硬件平台,数据包)、车辆在环(基于车辆执行,封闭场地)、司机在环(基于实际道路,司机评判) 3.硬件系统:V2X指车车通信、人车通信等;T-BOX是车联网通信网关,上接互联网,下接CAN总线;远距离用77G激光雷达,近距离用24G激光雷达; 4.各传感器作用:L1和L2以人为主怕误检,L3以上以车为主,怕漏检;根据刹车距离,传感器达到150m足够了;0.4度分辨率,在100m外可以探测到汽车、人和自行车,0.1度400米能检测到人(1.4米); 5.计算单元:需要冗余设计,目前主要是集中式处理器,所有计算集合到工控机;以后可能用嵌入式,使用sensor box做传感器数据融合;算法固定后可采用专用芯片,分为芯片设计、芯片制造和芯片封装; 6.车辆线控:减速控制(刹车)、转向控制(方向盘)和加速控制(油门),采用双备份冗余设计,提高安全性。分为三个阶段:对原车进行改装,加装电机控制,没有经过安全检测,安全隐患大;对车辆的ADAS系统进行接用,破解CAN总线协议,如MKZ的自动泊车及ACC;对车辆的定制,所有系统均可线控和手动控制,可考虑备份和冗余设计 7.Apollo硬件开发平台
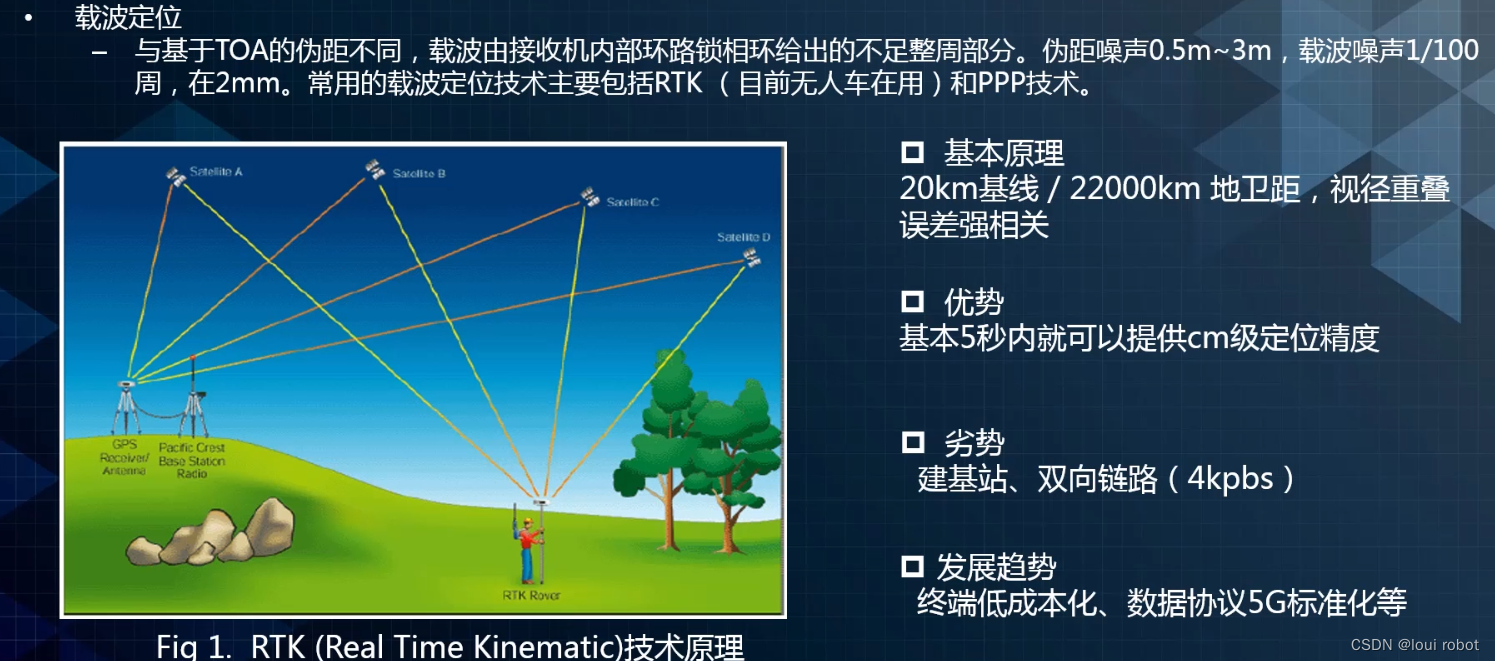
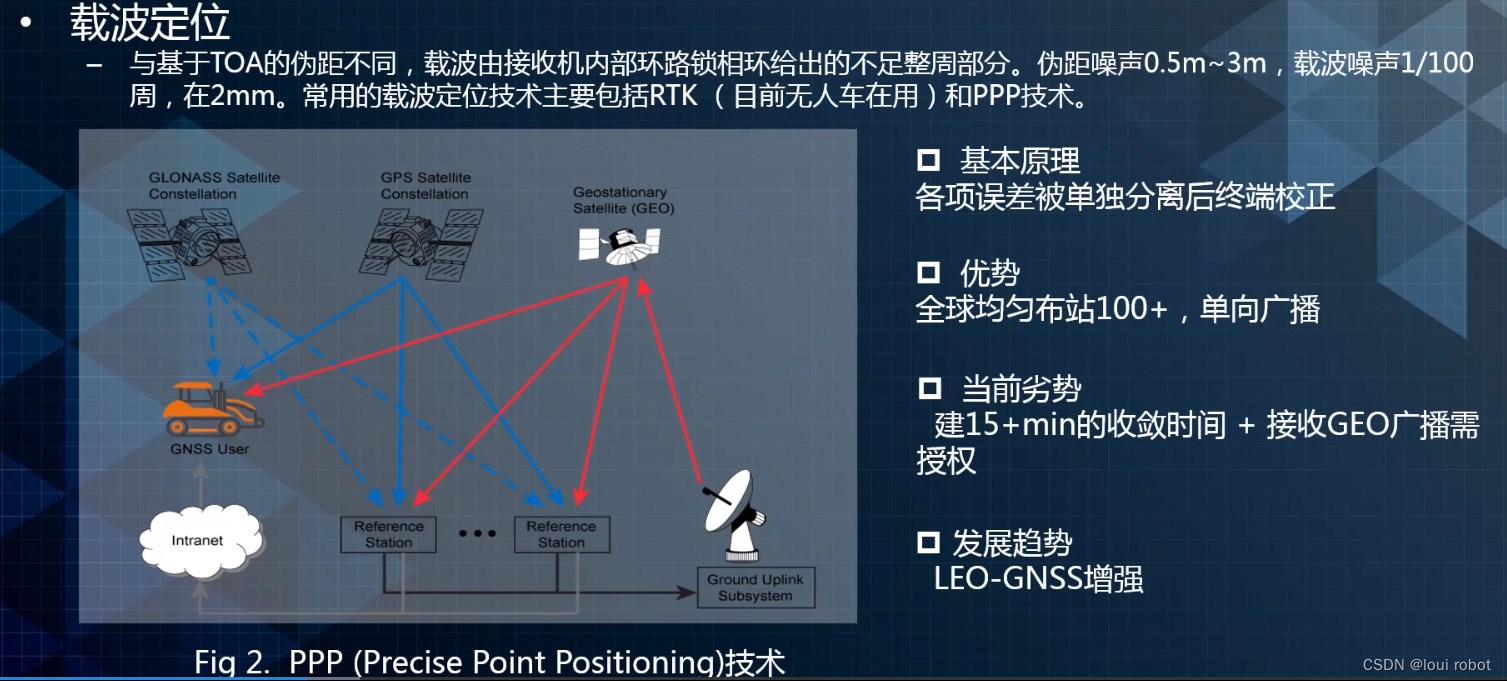
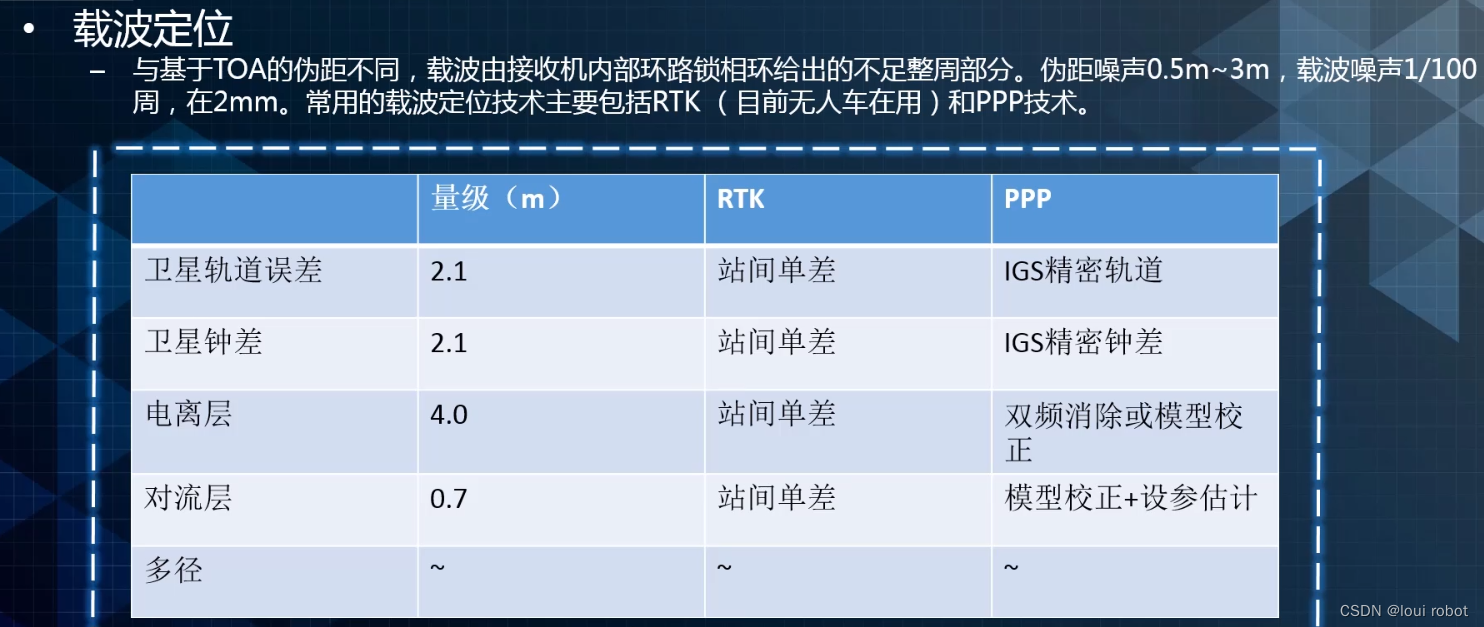
1.定位要求:精度小于10cm;鲁棒性,最大误差小于30cm;全天候场景 2.定位方法分类: 3.GPS:距离差分和载波相位差分,后者精度较高,分为RTK和PPP技术,目前RTK用的比较大,容易受电磁环境、遮挡和多路反射等影响;由于钟差需要四颗卫星;GPS授时
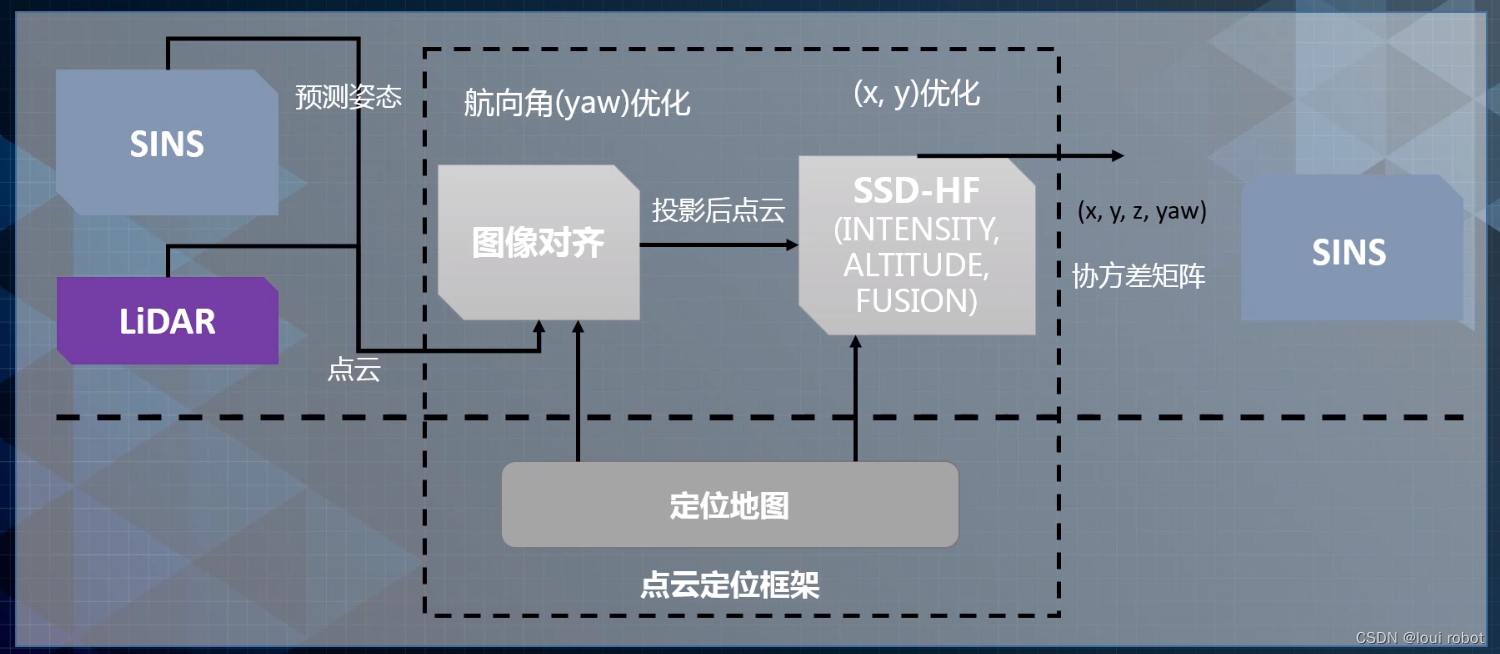
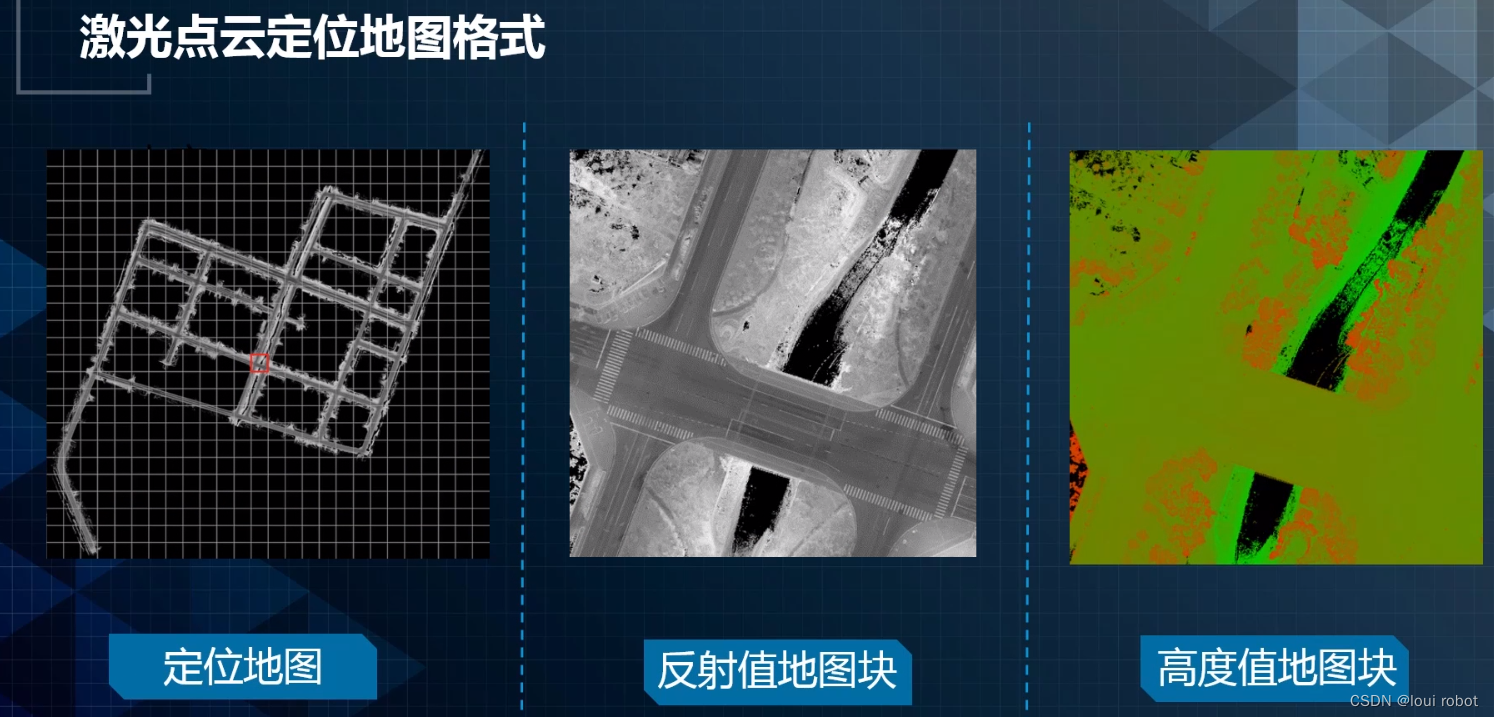
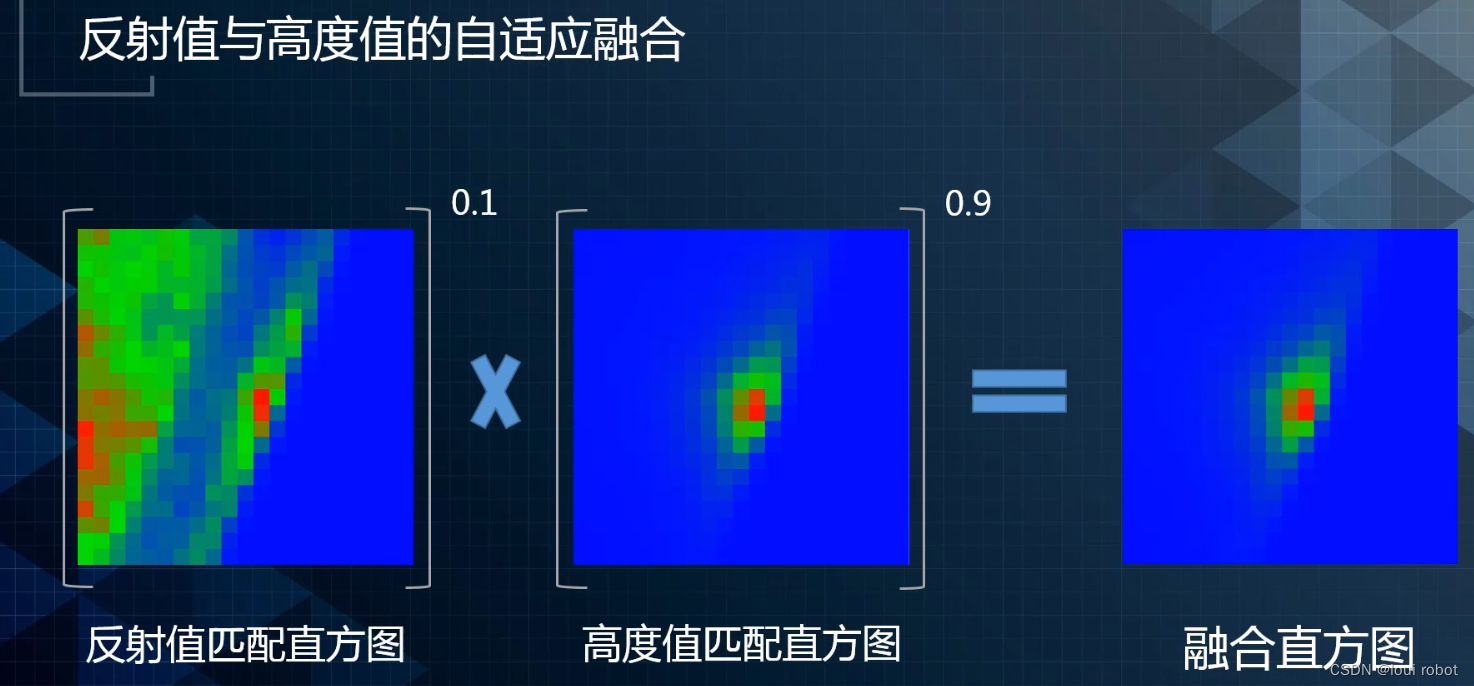
4.激光定位:地图可分为3D的体素地图和点云地图,2D的概率地图。航向角优化使用LK的方法优化颜色值和高度值信息,1、2度以内精度较高 定位地图格式:压成XY格子,每个格子有很多点,点中包含了Z值和颜色值,颜色值平均求方差放在反射值地图块,z值放在高度值地图块,格子分辨率为12.5cm 可用于定位地图、反射值和高度值等,窗口大小21*21个格子,红色表示响应值比较大,在这个位置概率比较大 加权自适应融合各图定位结果
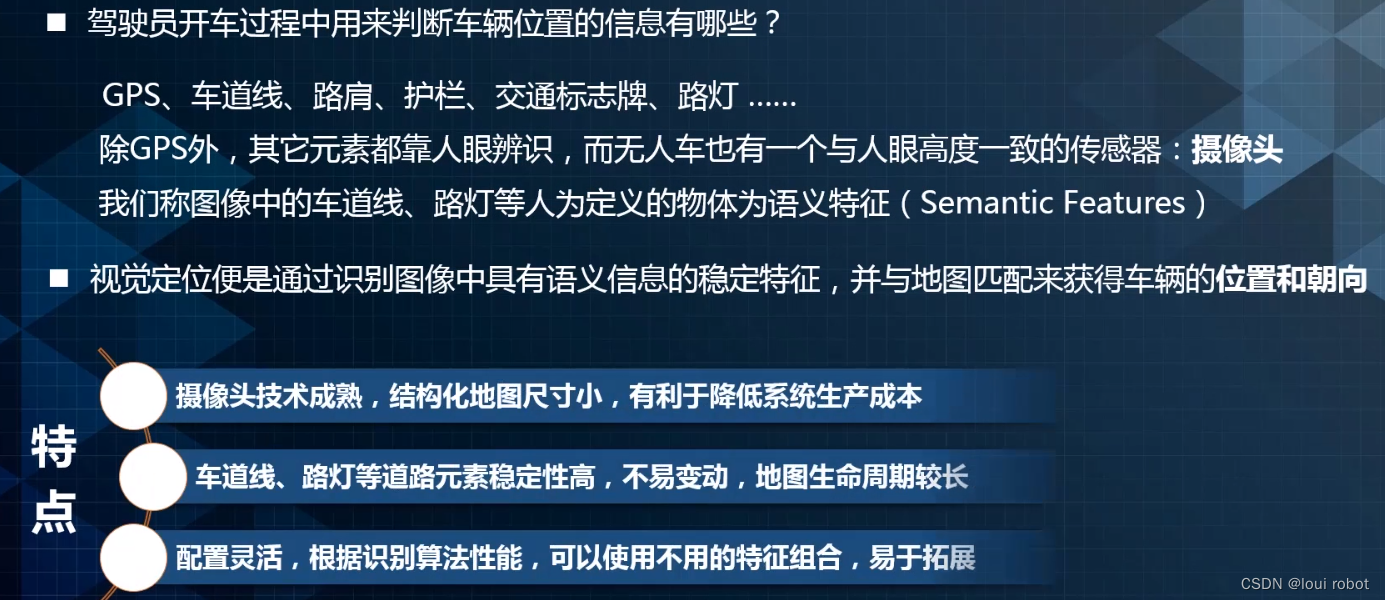
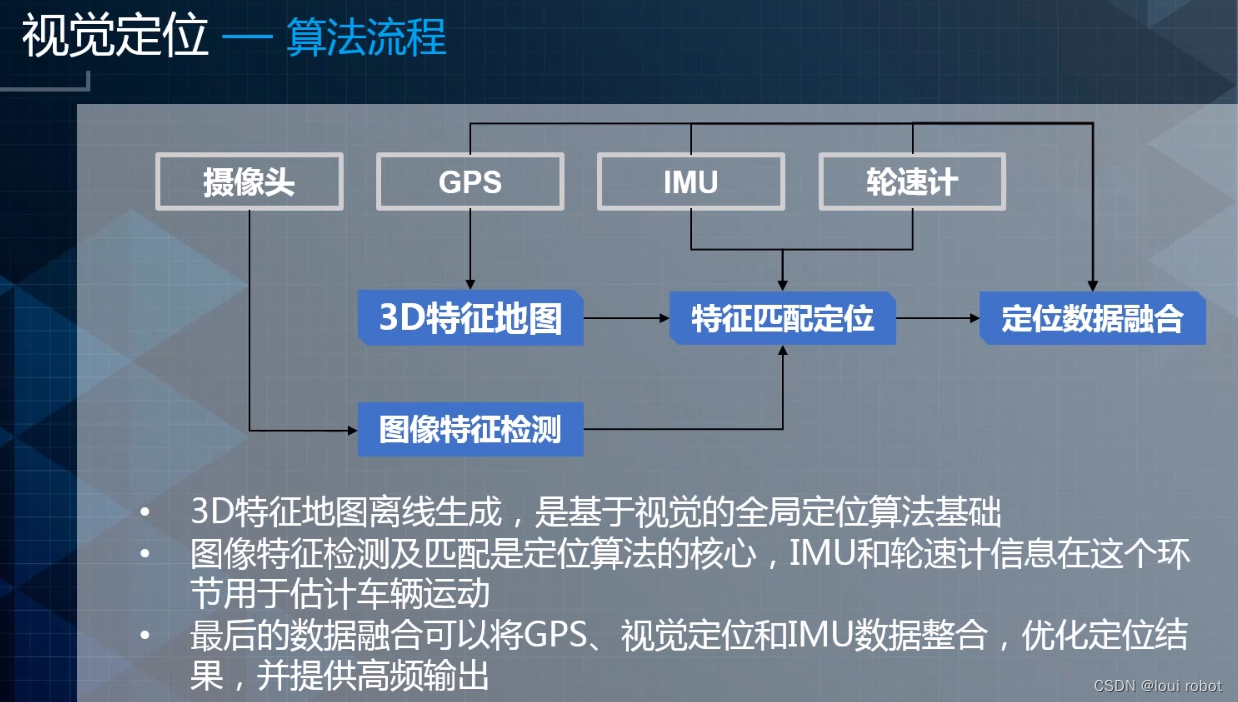
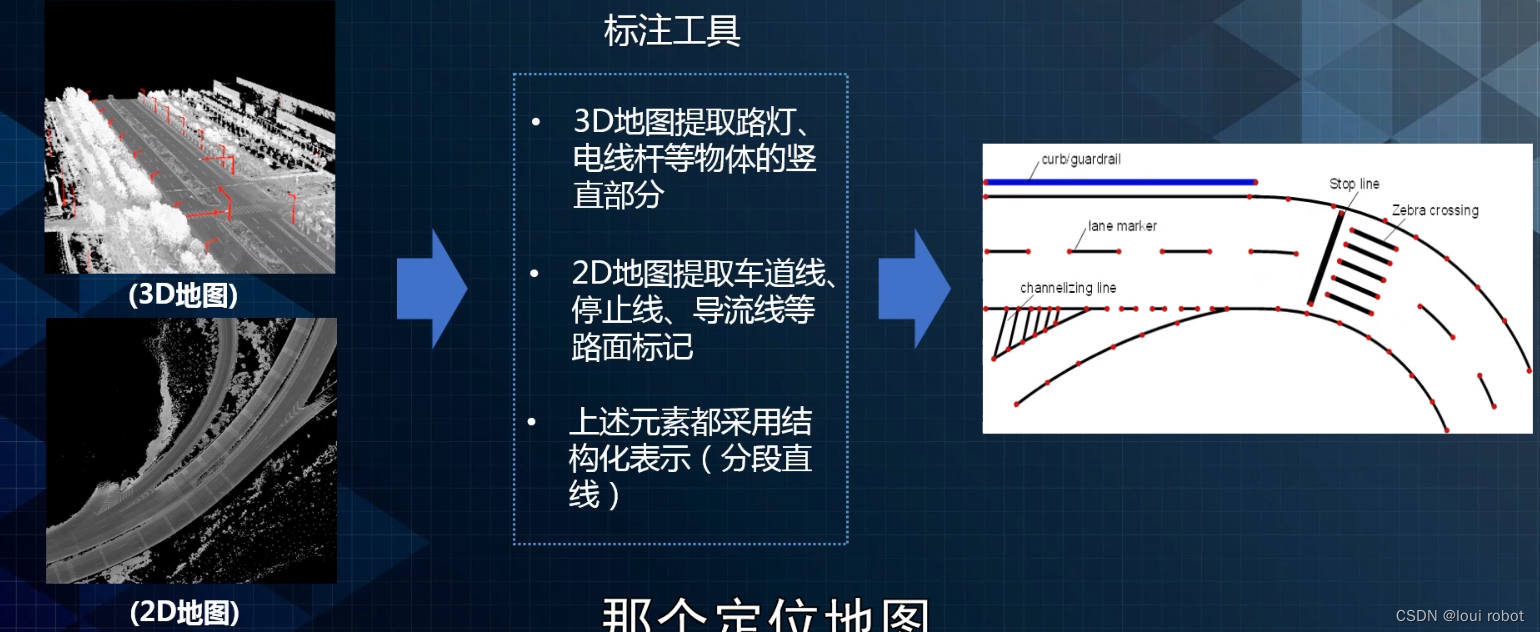
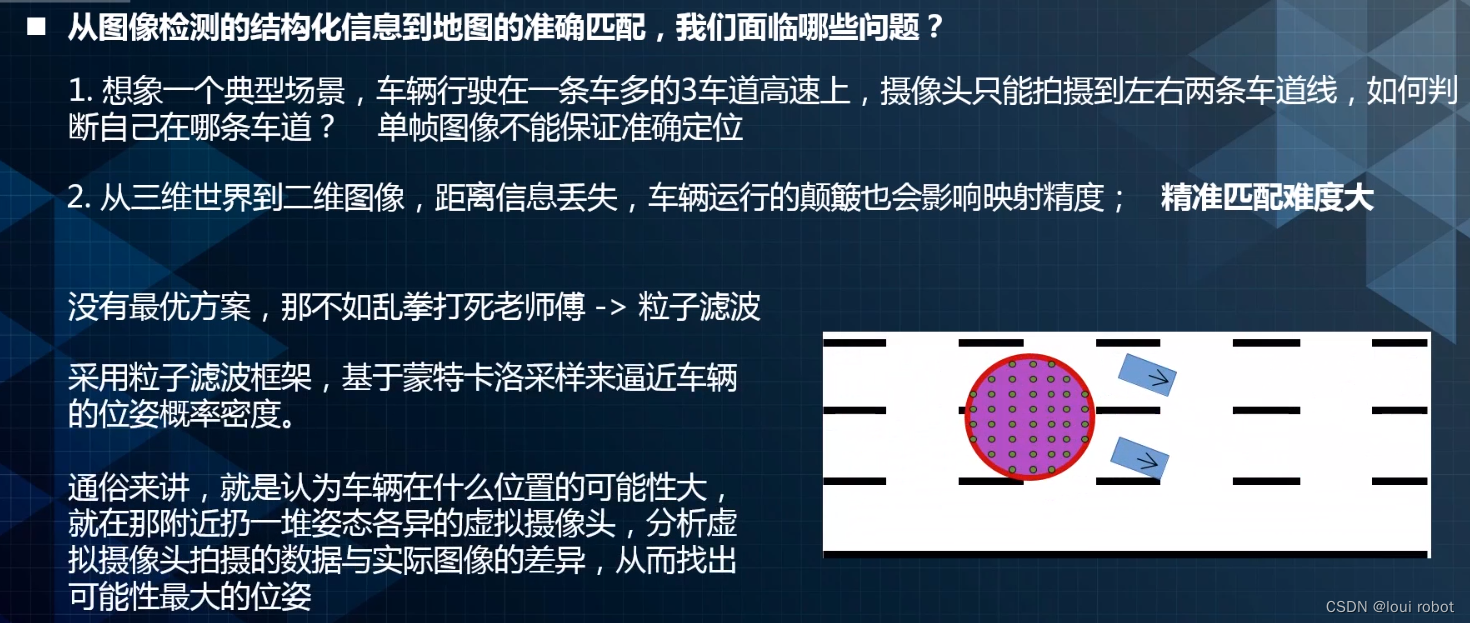
5.视觉定位:特征点可能因为光照等影响,检测的重复率较低;但具有语义信息的特征检测率比较高,如灯杆等。 包含杆状物和地标等,线段较难找到描述子,利用PF通过投影算法计算重合度,判断是否匹配,未标注杆状物时横向能保持十厘米以内,纵向达到几十厘米
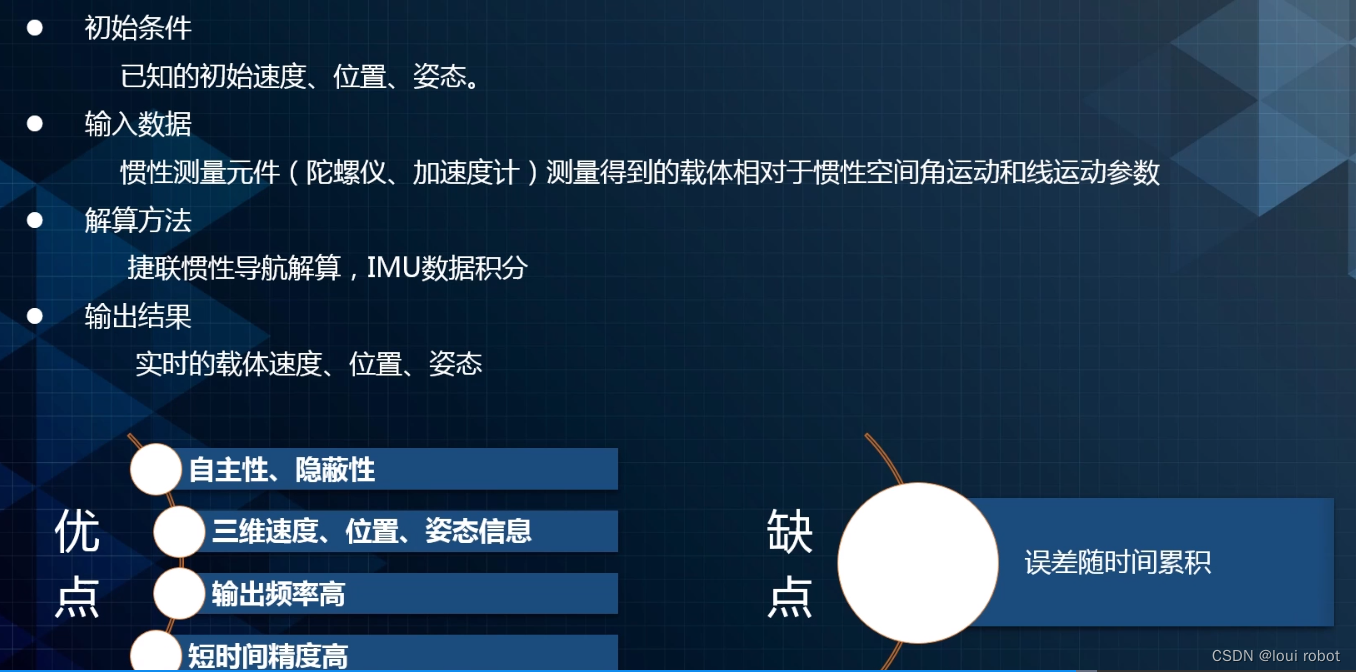
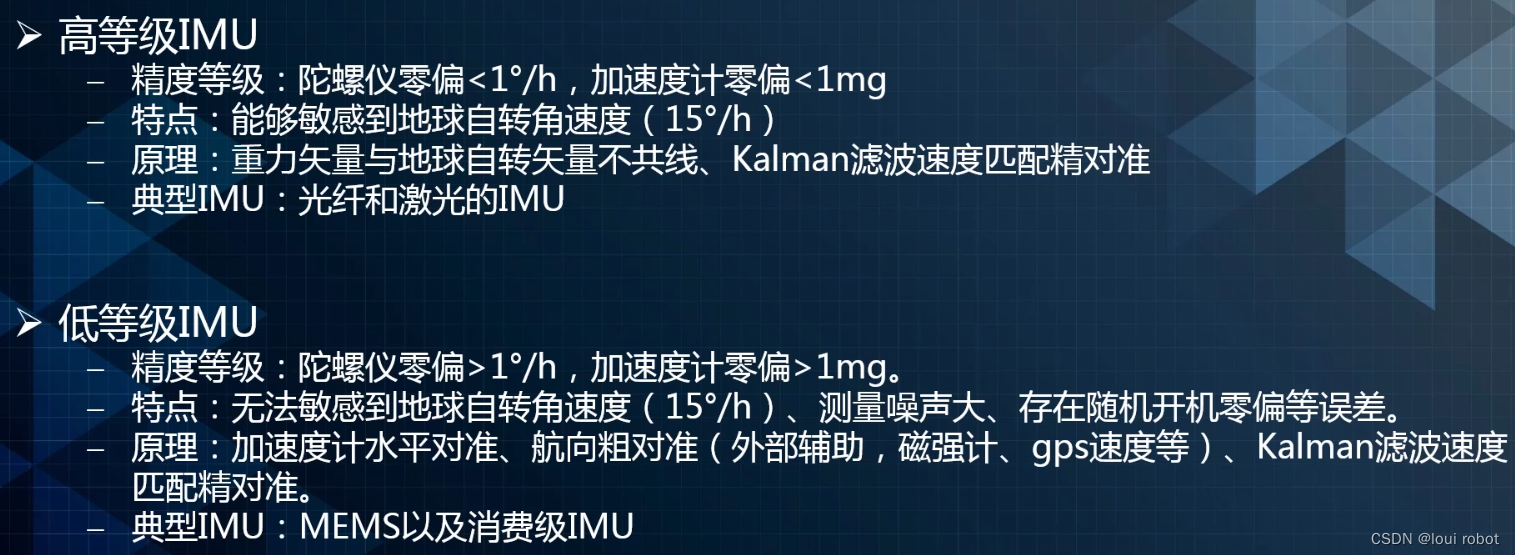
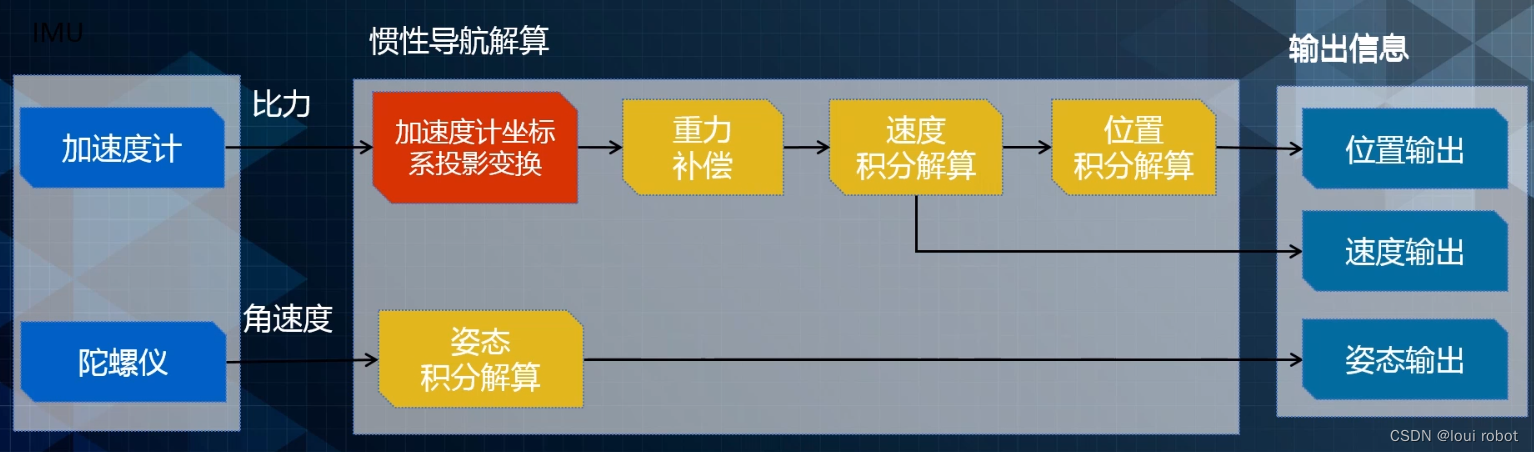
6.惯性导航(SINS):几十块到上千万,无人车用的IMU有1、2十万,5、600ms还很准; 初始化对准:低等级IMU航向角对准较难,常用双天线方式;
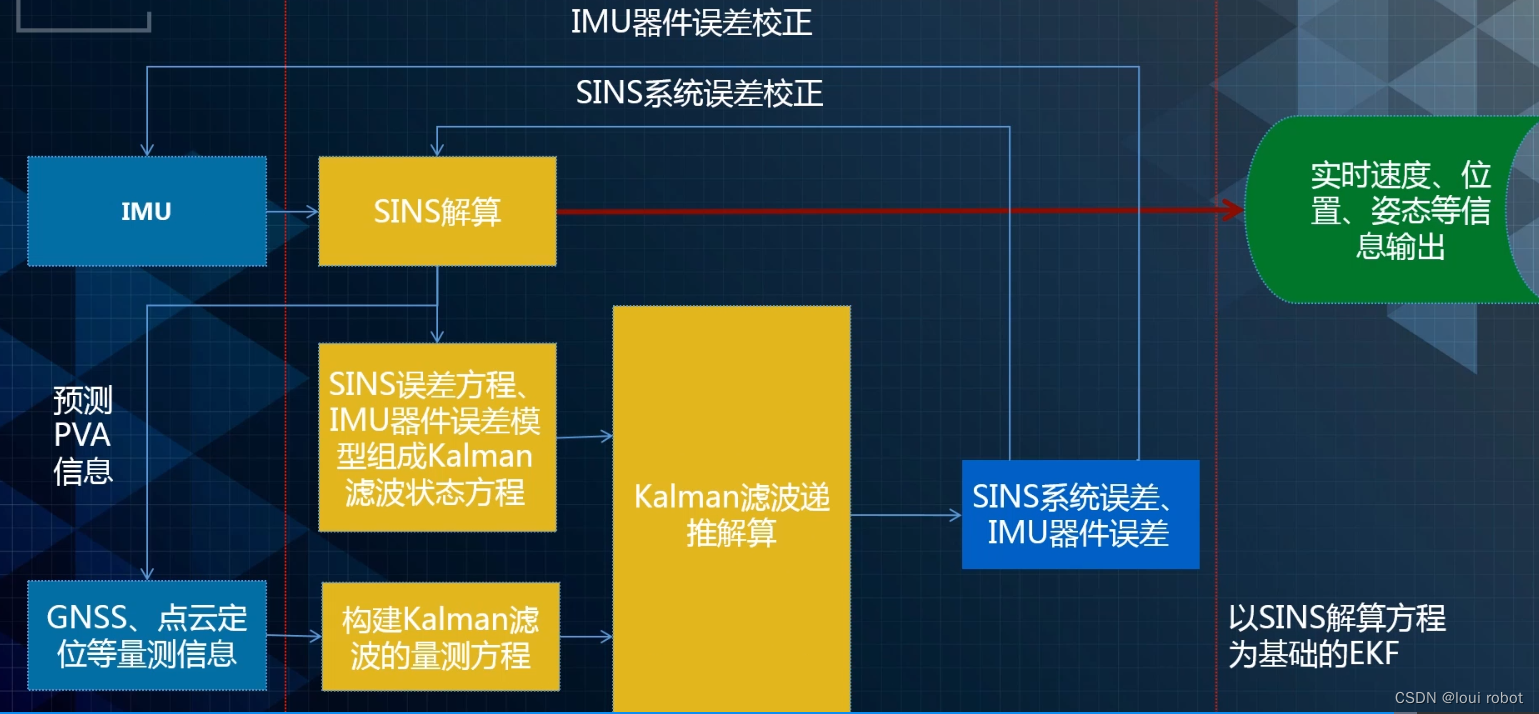
7.融合定位(组合导航)框架: 简化框架:
如:
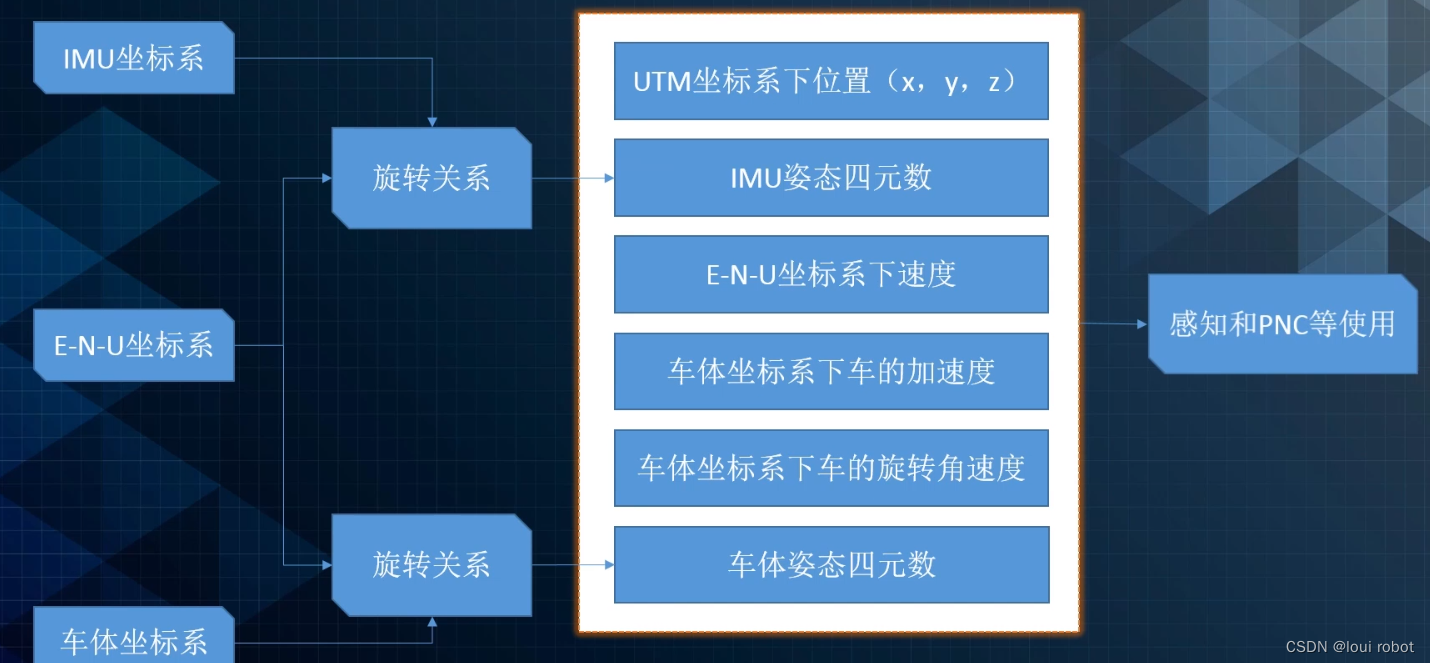
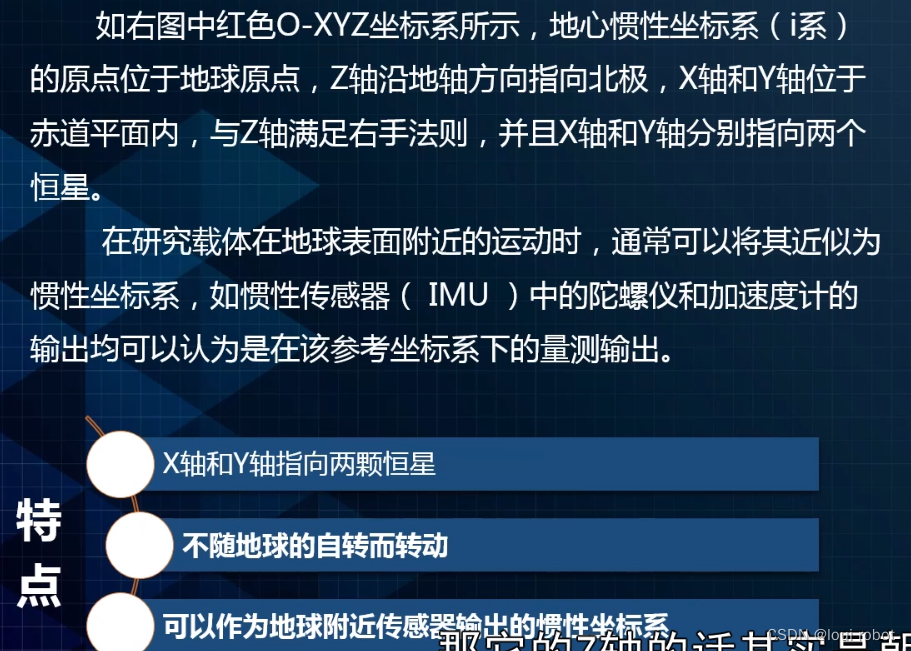
8.地心惯性坐标系(ECI)
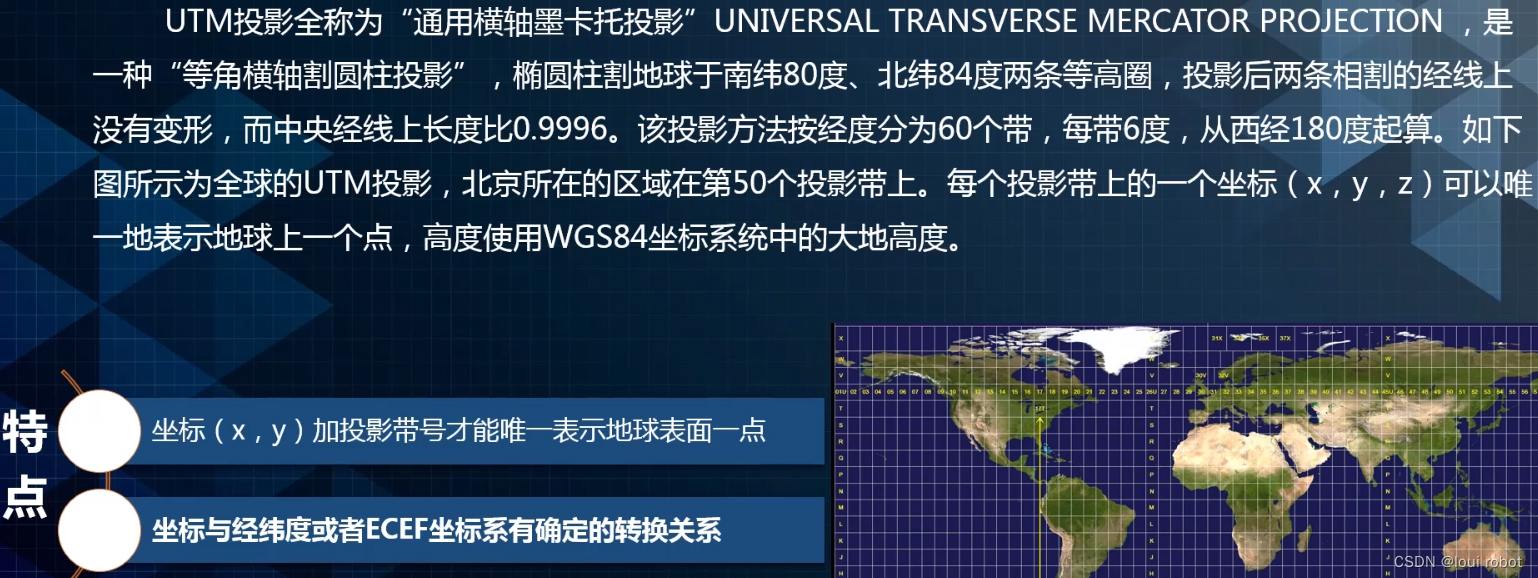
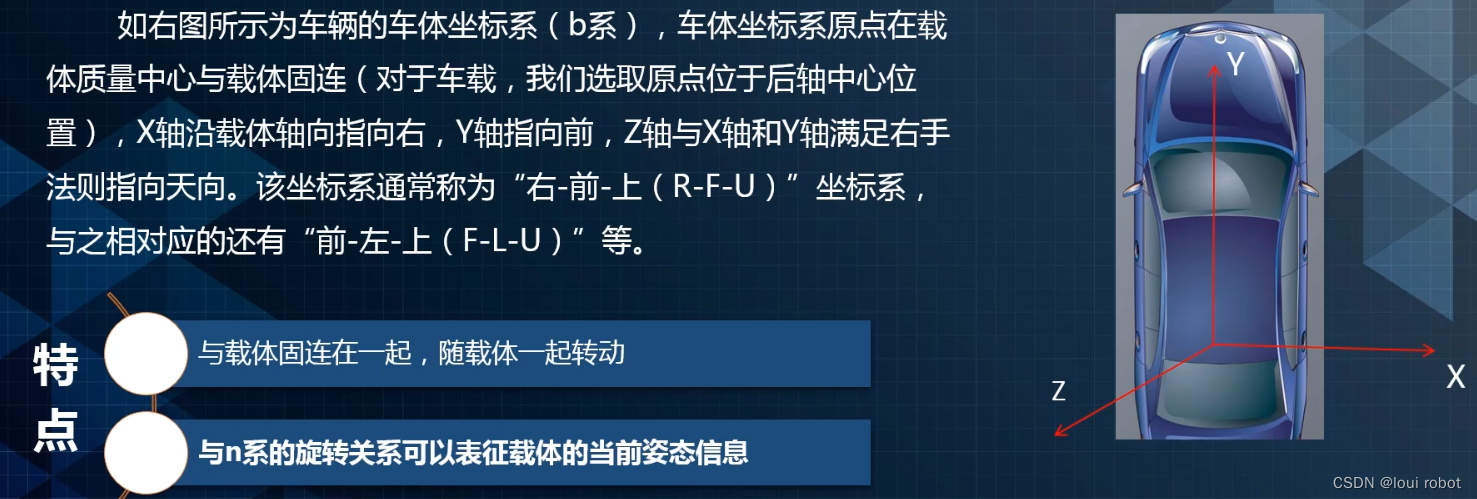
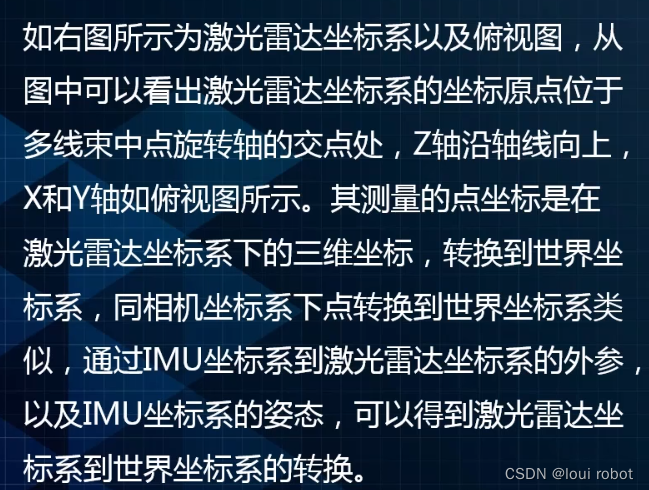
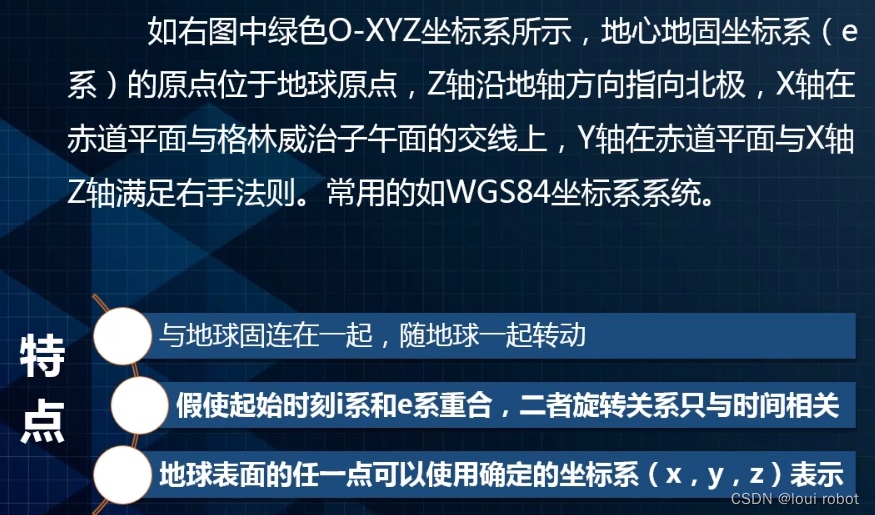
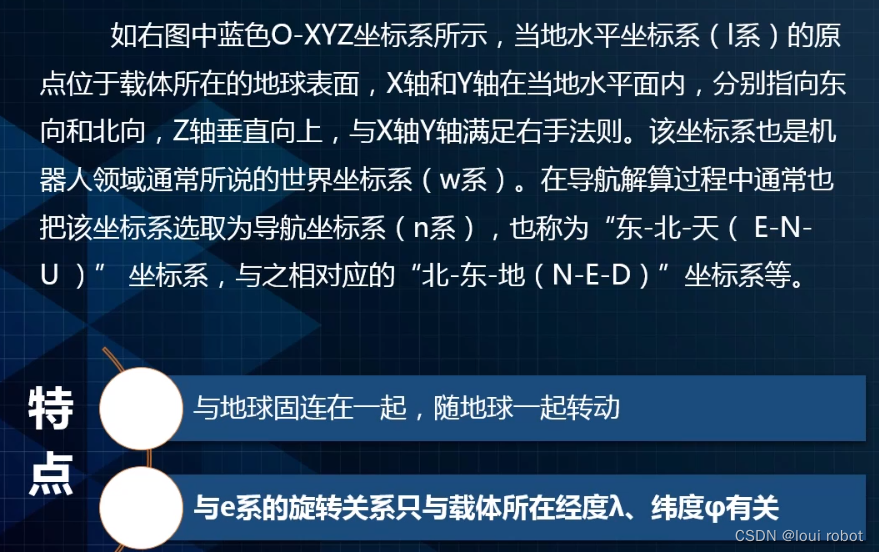
地心地固坐标系(ECEF) 9.当地水平坐标系:原点随载体移动而移动10.UTM:水平地图,把地球划分为60个区域,平时定位输出坐标系 11.车体坐标系 12.IMU坐标系 13.激光雷达坐标系 14.整体坐标系
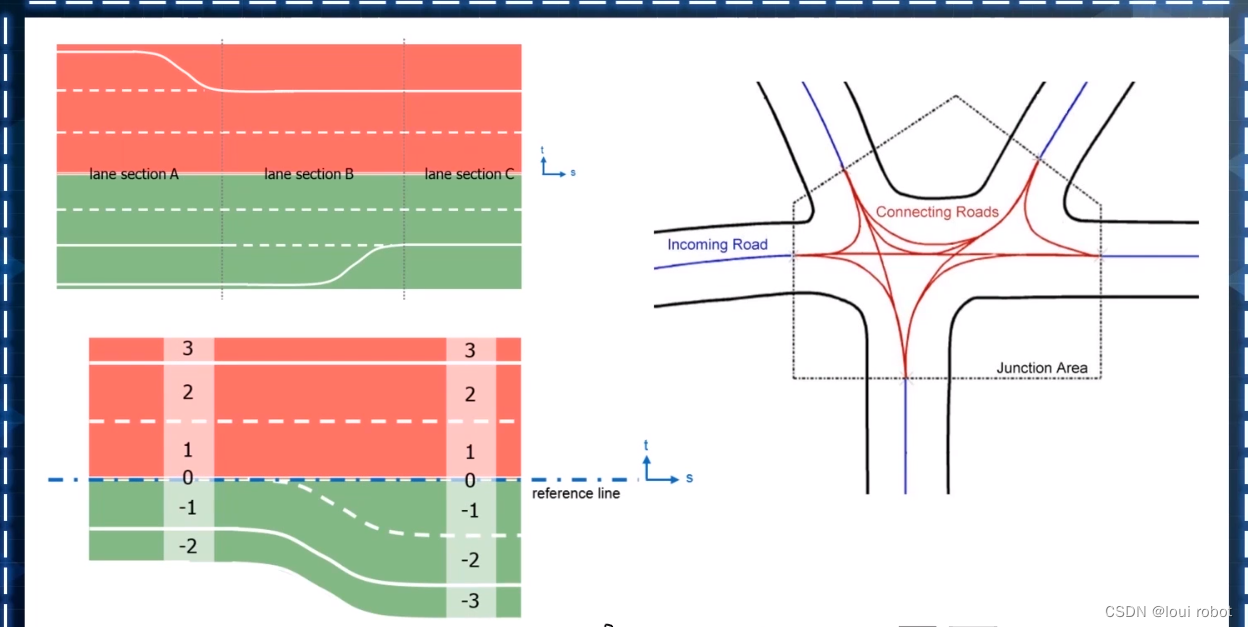
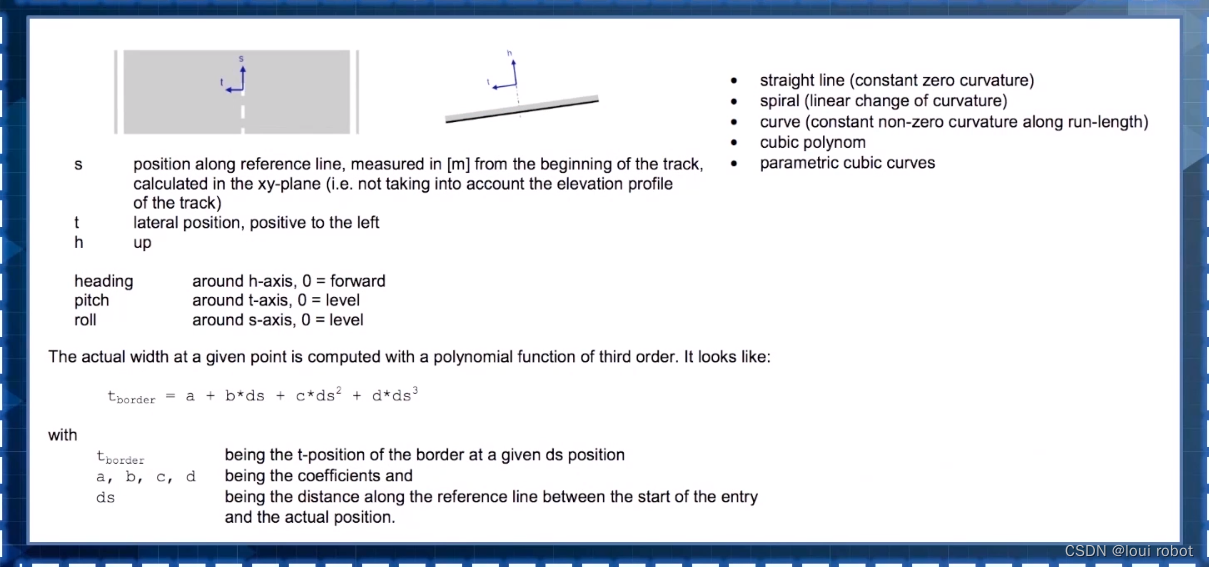
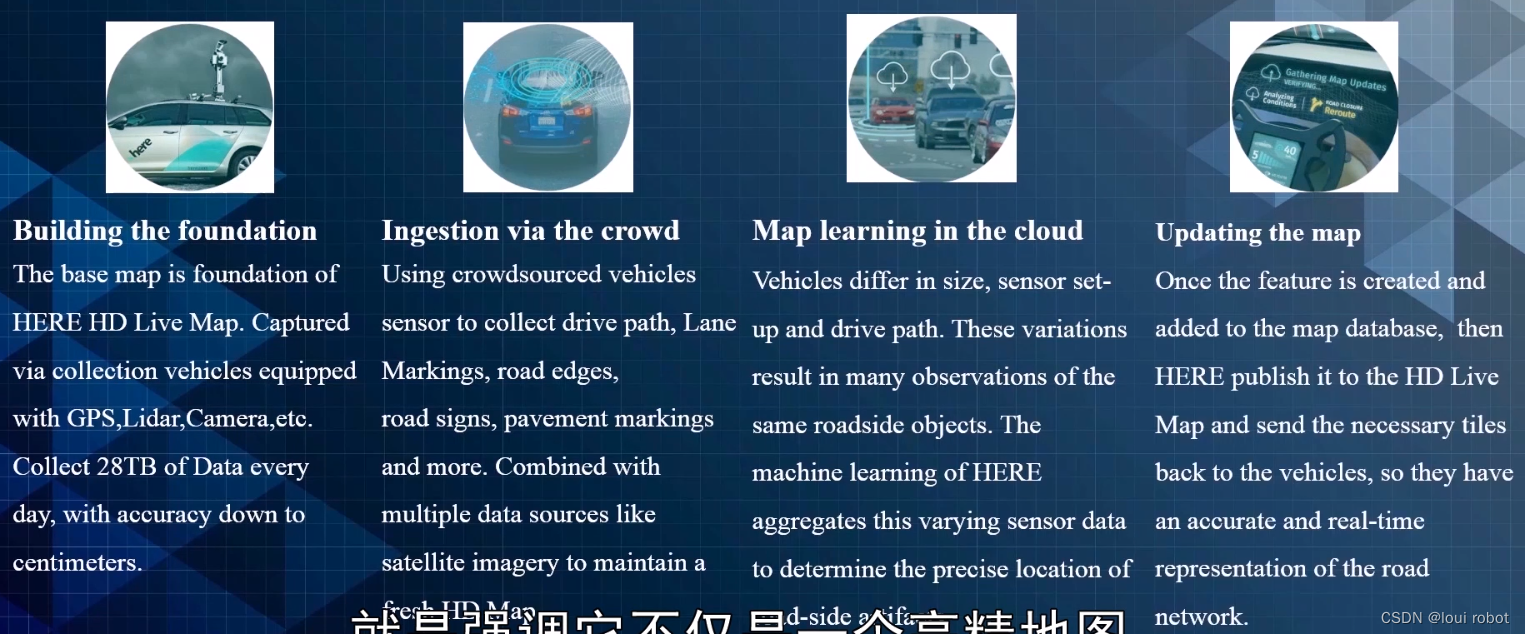
1.高精度图与自动驾驶关系,从云端下发车端需要保证实时性, 2.高精地图采集与生产:激光雷达和相机相互补充生成地图,宽凳和deepmotion都采用纯视觉制图,可达到厘米级,宽凳为20厘米,还有用行车记录仪做众包制图。 3.格式规范:常用NDS和OpenDrive。NDS支持局部更新。Apollo基于OpenDRIVE,如下图,采用section方式分割道路,根据道路变窄和属性切分;车道线和虚拟车道基于reference line描述, 4.高精地图产品:HERE的Live Map,生成过程基于激光雷达,如下图,使用激光雷达建立Base Map,每天有28T数据量,NVME硬盘传输数据块,其优点是更新快,分为静态层、定位层和冬动态物体层、人的驾驶习惯。 mobileeye基于视觉的众包REM制图方案,视觉方案车道线没那么连续,road boo数据结构一公里10k左右数据量。另外还有谷歌和TomTom等。 5.Apollo采集方案:16线激光雷达扫描比较高的红绿灯标志牌等; 跑4、5遍重建效果才比较好;红绿灯用riegl采集
规划的本质是搜索,寻找目标函数的最优解。深度优先和广度优先都属于无信息的搜索方式,为了提高搜索效率,常使用启发式的搜索方式。
docker近似建在Linux上的虚拟机,docker可以发布一个官方配置好的容器,可以下载部署,解决依赖问题







 10.UTM:水平地图,把地球划分为60个区域,平时定位输出坐标系
10.UTM:水平地图,把地球划分为60个区域,平时定位输出坐标系