前言
-
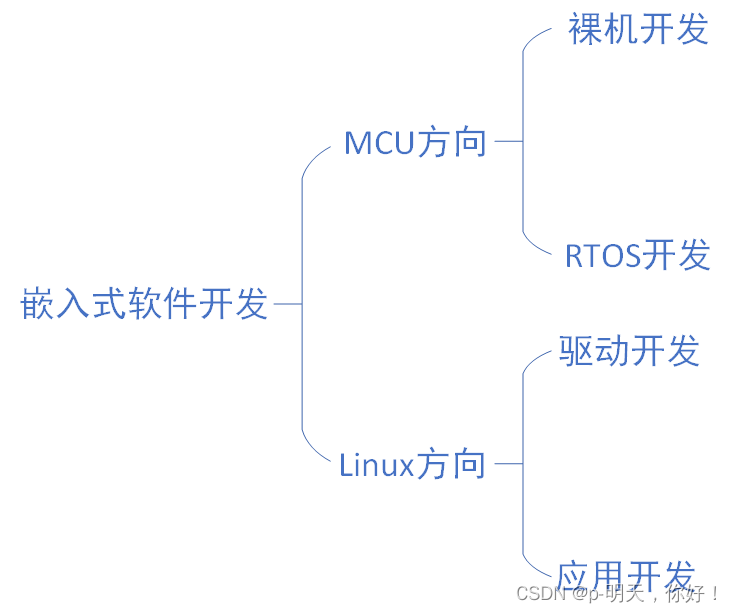
搞嵌入式有两个方向,一个是嵌入式软件开发 (MCU 方向),另一个是嵌入式软件开发 (Linux 方向)。其中 MCU 方向基本是裸机开发和 RTOS 开发。而 Linux 开发方向又分为驱动开发和应用开发。其中应用开发相比于驱动开发来说简单一些,因为搞驱动请你要和 Linux 内核打交道。而我们普通的单片机开发就是应用开发,和 Linux 开发没多大区别,单片机你去调别人写好的库,Linux 应用你也是调别人的驱动程序。
-
很多人学习的路线是:单片机到 RTOS,再到 Linux,这个路线其实是非常好,循序渐进。因为你学了单片机,所以你对 RTOS 的学习会很容易理解,单片机 + RTOS 在市面上也可以找到一个很好的工作。因为你学了 RTOS,你会发现 Linux 驱动开发其实和 RT-Thread 的驱动程序非常像,其实 RT-Thread 驱动大概率可能是仿 Linux 驱动而写的。所以如果你现在在学 RT-Thread,那么你后面去搞 Linux 驱动也是非常容易上手。
-
当然做驱动去之前你还是要学习一下 ubuntu 操作系统、ARM 裸机和 linux 系统移植,其目的就是为学习嵌入式 linux 驱动开发做准备。
本文通过在荔枝派上实现一个 hello 驱动程序,其目的是深入的了解加载驱动程序的运作过程。
一、设备驱动分类
在Linux中,驱动分为三大类:
- 字符设备驱动
- 字符设备驱动是占用篇幅最大的一类驱动,因为字符设备最多,从最简单的点灯到 I2C、SPI、音频等都属于字符设备驱动的类型。
- 块设备驱动
- 块设备和网络设备驱动要比字符设备驱动复杂,就是因为其复杂所以半导体厂商一般都给我们编写好了,大多数情况下都是直接可以使用的。
- 所谓的块设备驱动就是存储器设备的驱动,比如 EMMC、NAND、SD 卡和 U 盘等存储设备,因为这些存储设备的特点是以存储块为基础,因此叫做块设备。
- 网络设备驱动
- 网络设备驱动很好理解,不管是有线的还是无线的,都属于网络设备驱动的范畴。一个设备可以属于多种设备驱动类型,比如 USB WIFI,其使用 USB 接口,所以属于字符设备,但是其又能上网,所以也属于网络设备驱动。
我使用的Linux内核版本为 5.2.0,其支持设备树Device tree。
二、字符设备驱动简介
字符设备是Linux驱动中最基本的一类设备驱动,字符设备就是一个一个字节,按照字节流进行读写操作的设备,读写数据是分先后顺序的。比如我们最常见的点灯、按键、IIC、SPI,LCD 等等都是字符设备,这些设备的驱动就叫做字符设备驱动。
那么在Linux下的应用程序是如何调用驱动程序的呢?Linux 应用程序对驱动程序的调用如图所示:
Linux应用程序对驱动程序的调用流程
在Linux 中一切皆为文件,驱动加载成功以后会在/dev目录下生成一个相应的文件,应用程序通过对这个名为/dev/xxx(xxx是具体的驱动文件名字)的文件进行相应的操作即可实现对硬件的操作。
写驱动的人必须要懂linux内核,因为驱动程序就是根据内核的函数去写的,写应用的人不需要懂linux内核,只需要熟悉驱动函数就可以了。
比如现在有个叫做 /dev/led 的驱动文件,是 led 灯的驱动文件。应用程序使用 open 函数来打开文件 /dev/led,使用完成以后使用 close 函数关闭 /dev/led 这个文件。open 和 close 就是打开和关闭 led 驱动的函数,如果要点亮或关闭 led,那么就使用 write 函数来操作,也就是向此驱动写入数据,这个数据就是要关闭还是要打开 led 的控制参数。如果要获取 led 灯的状态,就用 read 函数从驱动中读取相应的状态。
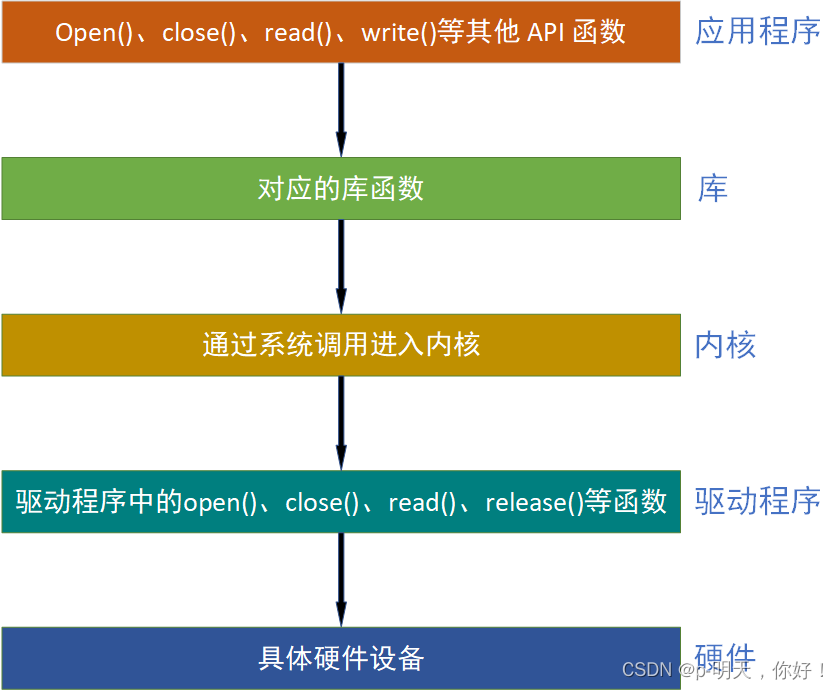
应用程序运行在用户空间,而 Linux 驱动属于内核的一部分,因此驱动运行于内核空间。当我们在用户空间想要实现对内核的操作,比如使用 open函数打开 /dev/led 这个驱动,因为用户空间不能直接对内核进行操作,因此必须使用一个叫做“系统调用”的方法来实现从用户空间“陷入”到内核空间,这样才能实现对底层驱动的操作。
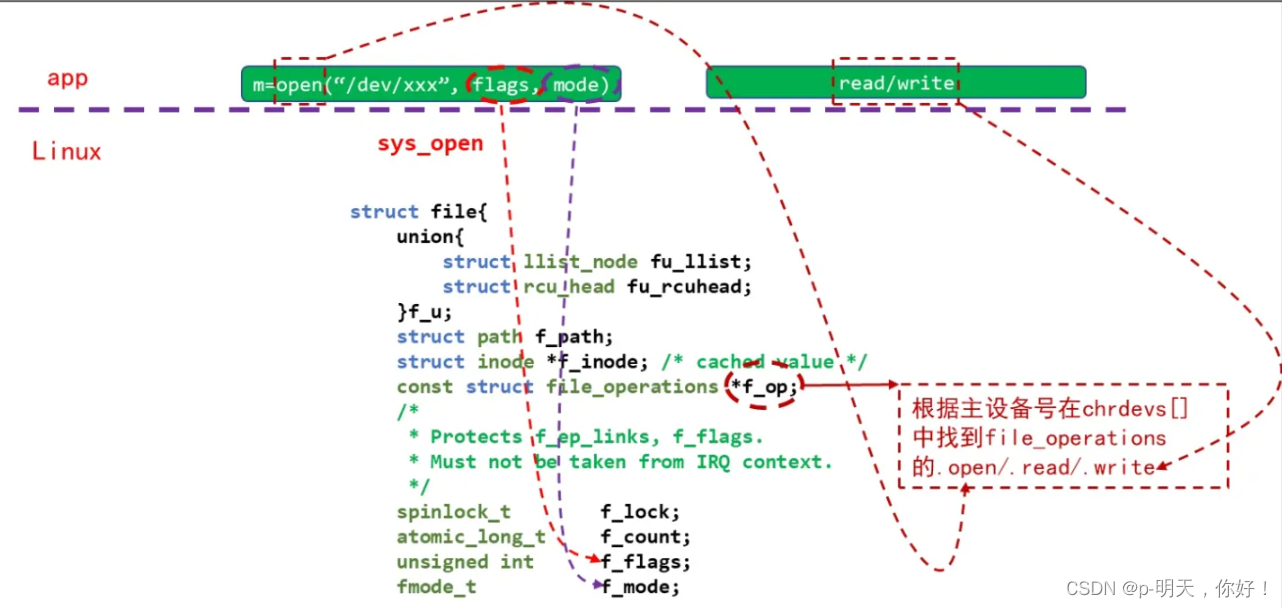
open、close、write 和 read等这些函数是由 C 库提供的,在 Linux 系统中,系统调用作为 C 库的一部分。当我们调用 open 函数的时候流程如图所示:

open函数调用流程
其中关于 C 库以及如何通过系统调用“陷入”到内核空间这个我们不用去管,我们关注的是应用程序和具体的驱动,应用程序使用到的函数在具体驱动程序中都有与之对应的函数,比如应用程序中调用了 open 这个函数,那么在驱动程序中也得有一个名为 open 的函数。每一个系统调用,在驱动中都有与之对应的一个驱动函数。
在 Linux 内核文件 include/linux/fs.h 中有个叫做 file_operations 的结构体,此结构体就是Linux 内核驱动操作函数集合,内容如下所示:
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*read_iter) (struct kiocb *, struct iov_iter *);
ssize_t (*write_iter) (struct kiocb *, struct iov_iter *);
int (*iopoll)(struct kiocb *kiocb, bool spin);
int (*iterate) (struct file *, struct dir_context *);
int (*iterate_shared) (struct file *, struct dir_context *);
__poll_t (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
unsigned long mmap_supported_flags;
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **, void **);
long (*fallocate)(struct file *file, int mode, loff_t offset,
loff_t len);
void (*show_fdinfo)(struct seq_file *m, struct file *f);
#ifndef CONFIG_MMU
unsigned (*mmap_capabilities)(struct file *);
#endif
ssize_t (*copy_file_range)(struct file *, loff_t, struct file *,
loff_t, size_t, unsigned int);
loff_t (*remap_file_range)(struct file *file_in, loff_t pos_in,
struct file *file_out, loff_t pos_out,
loff_t len, unsigned int remap_flags);
int (*fadvise)(struct file *, loff_t, loff_t, int);
} __randomize_layout;
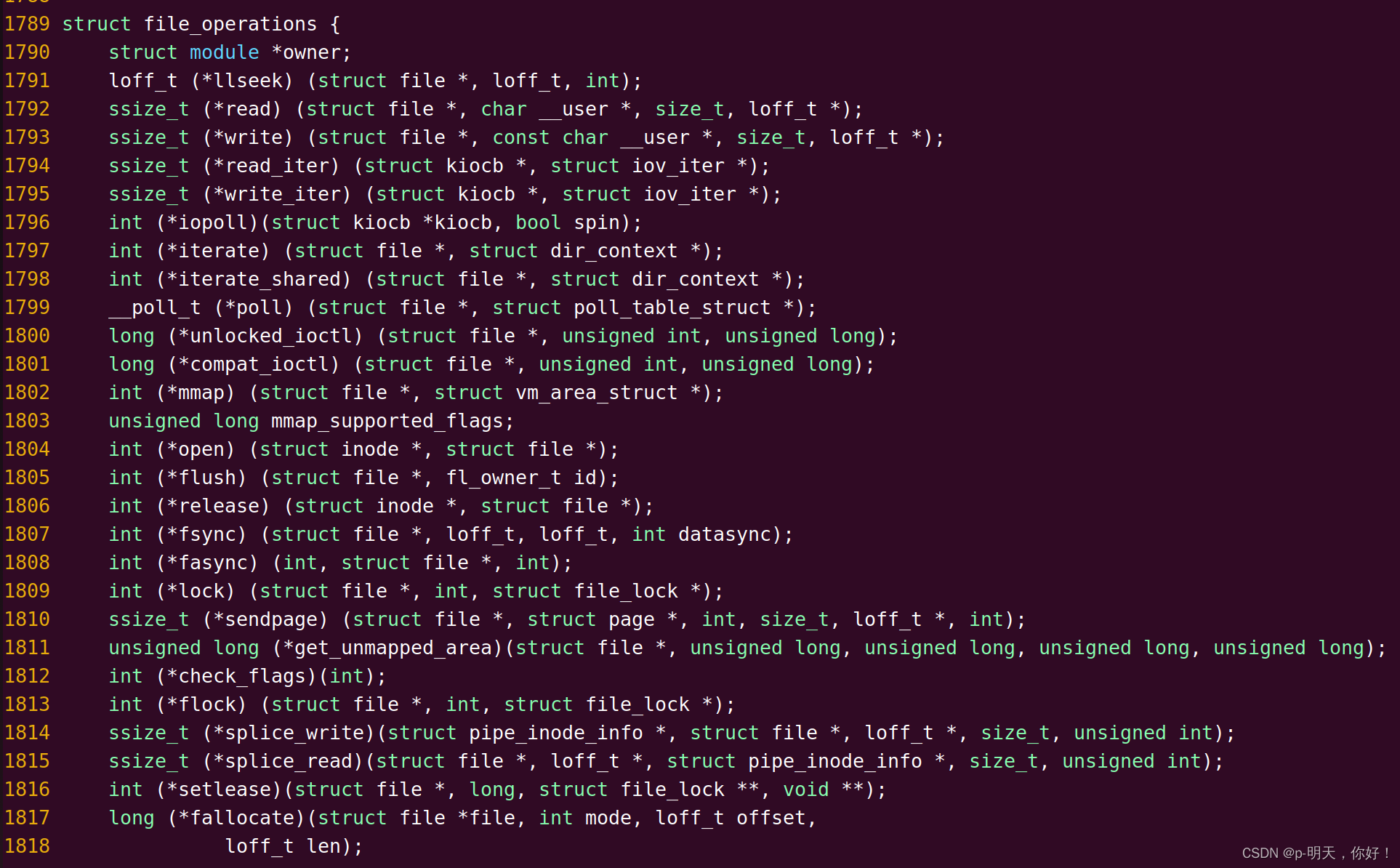
- 第 1790 行,owner 拥有该结构体的模块的指针,一般设置为THIS_MODULE。
- 第 1791 行,llseek 函数用于修改文件当前的读写位置。
- 第 1792 行,read 函数用于读取设备文件。
- 第 1793 行,write 函数用于向设备文件写入(发送)数据。
- 第 1799 行,poll 是个轮询函数,用于查询设备是否可以进行非阻塞的读写。
- 第 1800 行,unlocked_ioctl 函数提供对于设备的控制功能,与应用程序中的 ioctl 函数对应。
- 第 1801 行,compat_ioctl 函数与 unlocked_ioctl 函数功能一样,区别在于在 64 位系统上,32 位的应用程序调用将会使用此函数。在 32 位的系统上运行 32 位的应用程序调用的是 unlocked_ioctl。
- 第 1802 行,mmap 函数用于将将设备的内存映射到进程空间中(也就是用户空间),一般帧缓冲设备会使用此函数,比如 LCD 驱动的显存,将帧缓冲(LCD 显存)映射到用户空间中以后应用程序就可以直接操作显存了,这样就不用在用户空间和内核空间之间来回复制。
- 第 1804 行,open 函数用于打开设备文件。
- 第 1806 行,release 函数用于释放(关闭)设备文件,与应用程序中的 close 函数对应。
- 第 1807 行,fasync 函数用于刷新待处理的数据,用于将缓冲区中的数据刷新到磁盘中。
三、字符设备驱动开发
学习裸机或者 STM32 的时候关于驱动的开发就是初始化相应的外设寄存器,在 Linux 驱动开发中肯定也是要初始化相应的外设寄存器,这个是毫无疑问的。只是在 Linux 驱动开发中我们需要按照其规定的框架来编写驱动,所以说学 Linux 驱动开发重点是学习其驱动框架。
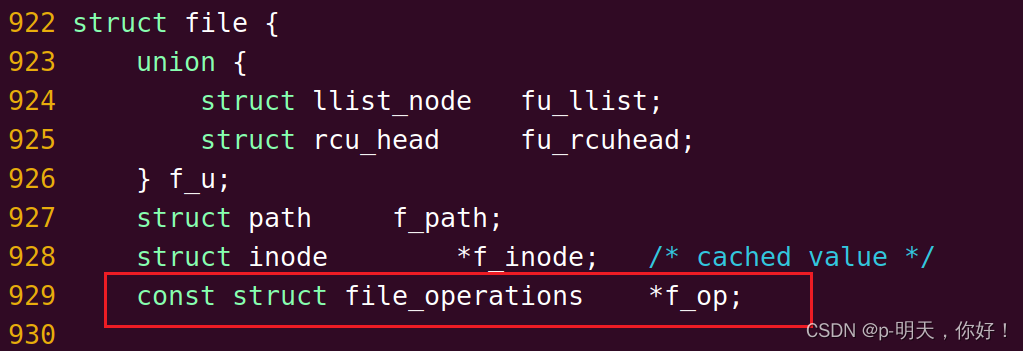
1、APP打开的文件在内核中如何表示
APP 使用 open 函数打开文件时,可以得到一个整数,这个整数被称为文件句柄。对于APP 的每一个文件句柄,在内核里面都有一个 struct file 与之对应。
struct file {
union {
struct llist_node fu_llist;
struct rcu_head fu_rcuhead;
} f_u;
struct path f_path;
struct inode *f_inode; /* cached value */
const struct file_operations *f_op;
/*
* Protects f_ep_links, f_flags.
* Must not be taken from IRQ context.
*/
spinlock_t f_lock;
enum rw_hint f_write_hint;
atomic_long_t f_count;
unsigned int f_flags;
fmode_t f_mode;
struct mutex f_pos_lock;
loff_t f_pos;
struct fown_struct f_owner;
const struct cred *f_cred;
struct file_ra_state f_ra;
u64 f_version;
#ifdef CONFIG_SECURITY
void *f_security;
#endif
/* needed for tty driver, and maybe others */
void *private_data;
#ifdef CONFIG_EPOLL
/* Used by fs/eventpoll.c to link all the hooks to this file */
struct list_head f_ep_links;
struct list_head f_tfile_llink;
#endif /* #ifdef CONFIG_EPOLL */
struct address_space *f_mapping;
errseq_t f_wb_err;
} __randomize_layout
__attribute__((aligned(4))); /* lest something weird decides that 2 is OK */
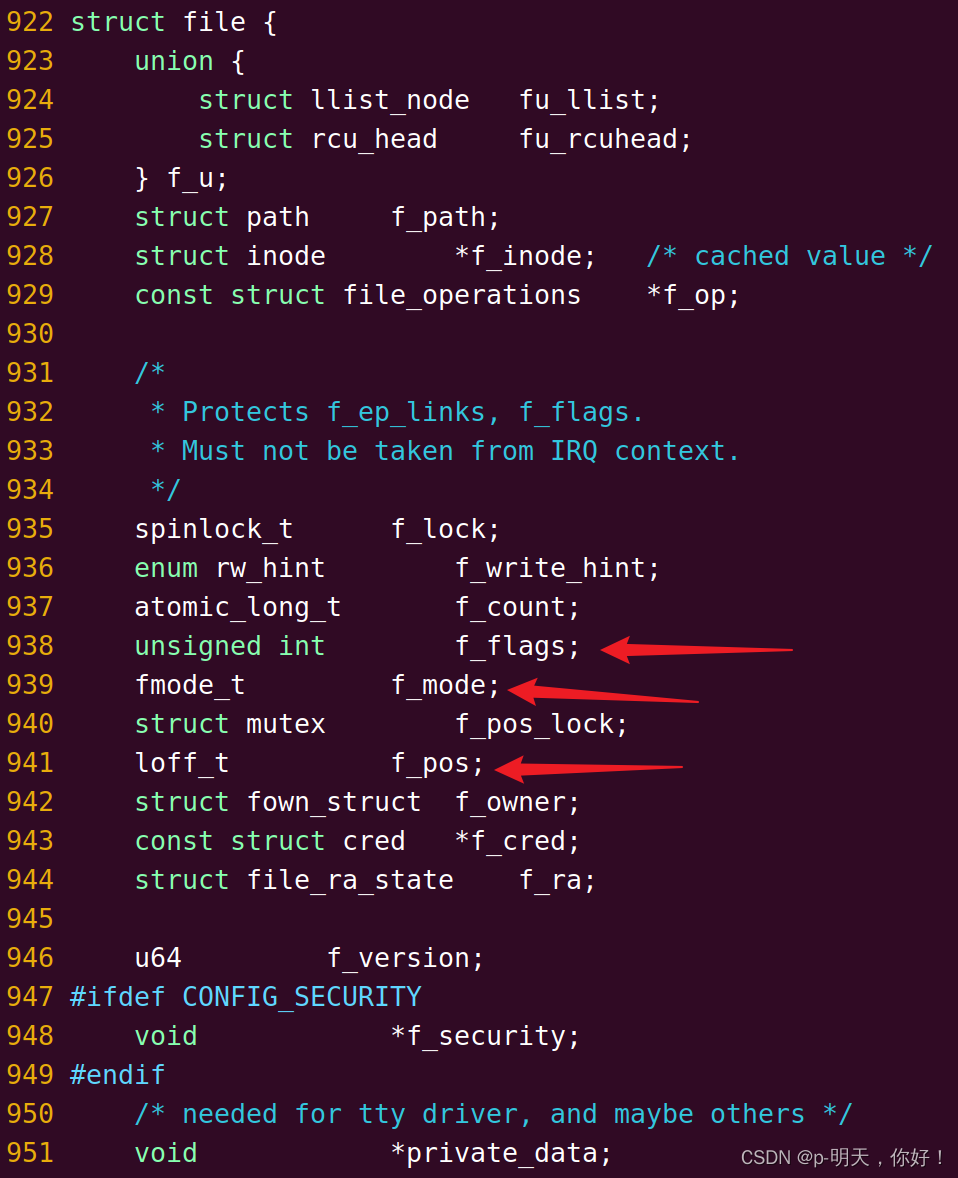
我们使用open打开文件时,传入的 flags、mode 等参数会被记录在内核中对应的 struct file 结构体里(f_flags、f_mode):
int open(const char *pathname, int flags, mode_t mode);
去读写文件时,文件的当前偏移地址也会保存在 struct file 结构体的 f_pos 成员里。
打开字符设备节点时,内核中也有对应的 struct file,注意这个结构体中的结构体:struct file_operations *f_op,这是由驱动程序提供的。
驱动程序的 open/read/write
2、编写驱动程序的步骤
- 确定主设备号,也可以让内核分配。
- 定义自己的 file_operations 结构体。
- 实现对应的 drv_open/drv_read/drv_write 等函数,填入 file_operations 结构体。
- 把file_operations结构体告诉内核:register_chrdev。
- 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数。
- 有入口函数就应该有出口函数:卸载驱动程序时,出口函数调用 unregister_chrdev。
- 其他完善:提供设备信息,自动创建设备节点:class_create,device_create。
3、hello 驱动程序编写
<1>、试验程序编写
应用程序调用 open 函数打开 hello_drv 这个设备,打开以后可以使用 write 函数向hello_drv 的写缓冲区 writebuf 中写入数据(不超过 100 个字节),也可以使用 read 函数读取读缓冲区 readbuf 中的数据操作,操作完成以后应用程序使用 close 函数关闭 chrdevbase 设备。
hello_drv.c
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
/* 1. 确定主设备号*/
static int major = 200;
static char kernel_buf[1024];
static struct class *hello_class;
#define MIN(a, b) (a < b ? a : b)
/* 3. 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t hello_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_to_user(buf, kernel_buf, MIN(1024, size));
return MIN(1024, size);
}
static ssize_t hello_drv_write (struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
err = copy_from_user(kernel_buf, buf, MIN(1024, size));
return MIN(1024, size);
}
static int hello_drv_open (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
static int hello_drv_close (struct inode *node, struct file *file)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
return 0;
}
/* 2. 定义自己的file_operations结构体*/
static struct file_operations hello_drv = {
.owner = THIS_MODULE,
.open = hello_drv_open,
.read = hello_drv_read,
.write = hello_drv_write,
.release = hello_drv_close,
};
/* 4. 把file_operations结构体告诉内核:注册驱动程序 */
/* 5. 谁来注册驱动程序啊?得有一个入口函数:安装驱动程序时,就会去调用这个入口函数 */
static int __init hello_init(void)
{
int retvalue;
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
retvalue = register_chrdev(major, "hello_drv", &hello_drv); /* /dev/hello_drv */
if(retvalue < 0){
printk("chrdevbase driver register failed\r\n");
}
printk("chrdevbase init!\r\n");
return 0;
}
/* 6. 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数*/
static void __exit hello_exit(void)
{
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "hello_drv");
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("licheepi");
<2>、测试程序编写
驱动编写好以后是需要测试的,一般编写一个简单的测试 APP,测试 APP 运行在用户空间。测试 APP 很简单,通过输入相应的指令来对 hello_drv 设备执行读或者写操作。
hello_drv_test.c
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
/*
app测试
./hello_drv_test -w hello licheepi Zero !!!
./hello_drv_test -r
*/
int main(int argc, char **argv)
{
int fd;
char buf[1024];
int len;
/* 1. 判断参数 */
if (argc < 2)
{
printf("Usage: %s -w <string>\n", argv[0]);
printf(" %s -r\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open("/dev/hello_drv", O_RDWR);
if (fd == -1)
{
printf("can not open file /dev/hello_drv\n");
return -1;
}
/* 3. 写文件或读文件 */
if ((0 == strcmp(argv[1], "-w")) && (argc == 3))
{
len = strlen(argv[2]) + 1;
len = len < 1024 ? len : 1024;
write(fd, argv[2], len);
}
else
{
len = read(fd, buf, 1024);
buf[1023] = '\0';
printf("APP read : %s\n", buf);
}
close(fd);
return 0;
}
<3>、编写 Makefile
KERNELDIR := /home/Gnep/licheepi_zero/linux
CURRENT_PATH := $(shell pwd)
obj-m := hello_drv.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
$(CROSS_COMPILE)arm-linux-gnueabihf-gcc -o hello_drv_test hello_drv_test.c
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
- 第 1 行,KERNELDIR 表示开发板所使用的 Linux 内核源码目录,使用绝对路径,大家根据自己的实际情况填写。
- 第2行,CURRENT_PATH 表示当前路径,直接通过运行 pwd 命令来获取当前所处路径。
- 第3行,obj-m 表示将 hello_drv.c 这个文件编译为 hello_drv.ko 模块。
- 第8行,具体的编译命令,后面的 modules 表示编译模块,-C 表示将当前的工作目录切换到指定目录中,也就是 KERNERLDIR 目录。M 表示模块源码目录,make modules 命令中加入 M=dir 以后程序会自动到指定的 dir 目录中读取模块的源码并将其编译为 .ko 文件。
- 第9行,使用交叉编译工具链将 hello_drv_test.c 编译成可以在 arm 板子上运行的hello_drv_test 可执行文件。
至此,目录下存在以下三个文件,分别是 hello_drv.c、hello_drv_test.c、Makefile

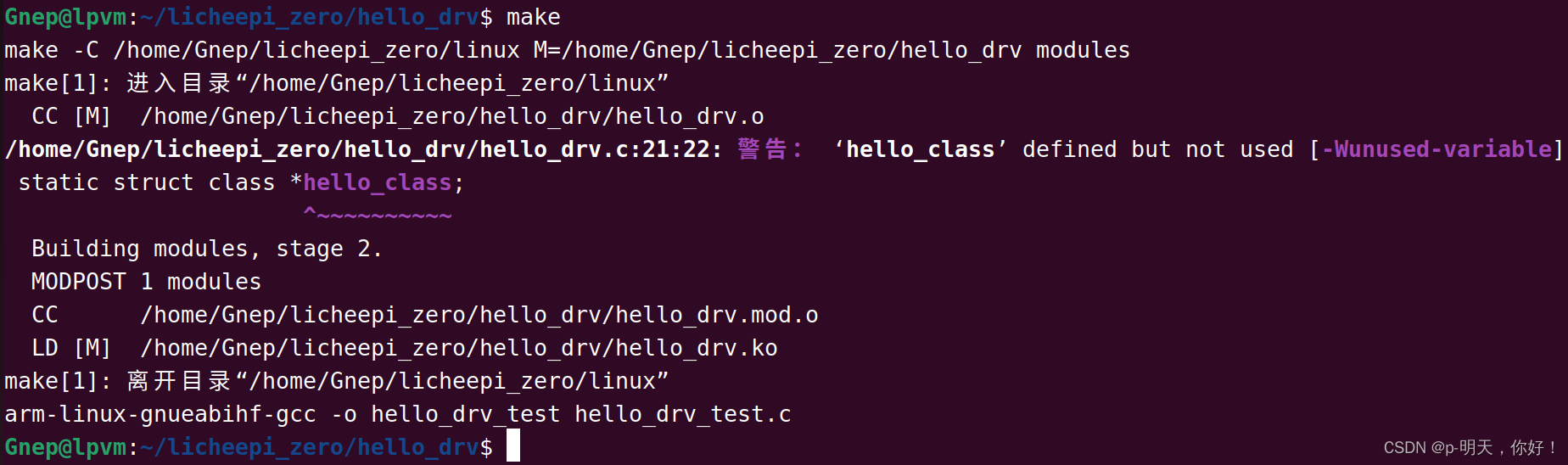
<4>、编译
Makefile 编写好以后输入 make 命令编译驱动模块,编译过程如图所示。
注:ubuntu 中的 linux 源码需要之前编译过,编译的具体步骤请参考:
荔枝派Zero(全志V3S)编译Kernel
编译成功以后就会生成一个叫做 hello_drv.ko 的文件,此文件就是 hello_drv 设备的驱动模块。至此,hello_drv设备的驱动就编译成功。

3、运行测试
<1>、上传程序到开发板执行
主机 ip :192.168.25.25
板子 ip :192.168.25.20
这里通过 tftp 命令将文件直接上传到板子上,具体的 tftp 服务器搭建及使用方法可以参考:SSH 服务器、NFS 服务器、TFTP 服务器详解及测试
在板子串口测执行以下指令将 hello_drv.ko、 hello_drv_test 传输到板子上
tftp -g -l hello_drv.ko 192.168.25.25
tftp -g -l hello_drv_test 192.168.25.25
ls

<2>、加载驱动模块
驱动模块 hello_drv.ko 和 hello_drv_test 可执行文件都已经准备好了,接下来就是运行测试。输入如下命令加载 hello_drv.ko 驱动文件:
insmod hello_drv.ko

输入 lsmod 命令即可查看当前系统中存在的模块
lsmod

当前系统只有 hello_drv 这一个模块。输入如下命令查看当前系统中有没有 hello_drv 这个设备:
cat /proc/devices
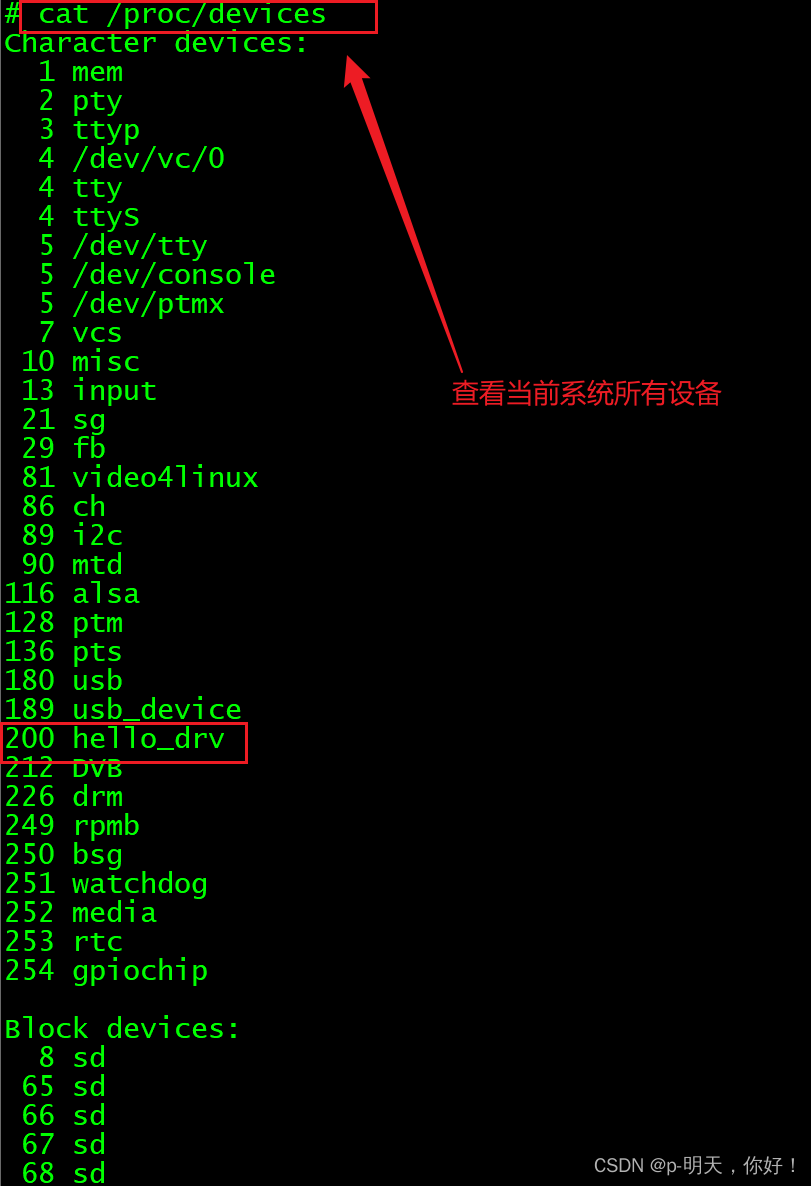
可以看出,当前系统存在 hello_drv 这个设备,主设备号为 200,跟我们设置的主设备号一致。
<3>、创建设备节点文件
驱动加载成功需要在 /dev 目录下创建一个与之对应的设备节点文件,应用程序就是通过操作这个设备节点文件来完成对具体设备的操作。输入如下命令创建 /dev/hello_drv 这个设备节点文件:
mknod /dev/hello_drv c 200 0
其中 mknod 是创建节点命令,/dev/hello_drv 是要创建的节点文件,c 表示这是个字符设备,200 是设备的主设备号,0 是设备的次设备号。创建完成以后就会存在 /dev/hello_drv 这个文件。
如果 hello_drv_test 想要读写 hello_drv 设备,直接对 /dev/hello_drv 进行读写操作即可。相当于 /dev/hello_drv 这个文件是 hello_drv 设备在用户空间中的实现。Linux 下一切皆文件,包括设备也是文件,现在大家应该是有这个概念了吧?
<4>、hello_drv 设备操作测试
一切准备就绪。使用 hello_drv_test 软件操作 hello_drv 这个设备,看看读写是否正常,首先进行写操作,将字符串输入 hello Licheepi !!! 写入到内核中
./hello_drv_test -w "hello Licheepi !!!"

然后再从内核中将刚写入的字符串读出来
./hello_drv_test -r

可以看到读写正常,说明我们编写的 hello_drv 驱动是没有问题的。
<5>、卸载驱动模块
如果不再使用某个设备的话可以将其驱动卸载掉,比如输入如下命令卸载掉 hello_drv 这个设备:
rmmod hello_drv.ko
卸载以后使用 lsmod 命令查看 hello_drv 这个模块还存不存在:
lsmod

可以看出,此时系统已经没有任何模块了,hello_drv 这个模块也不存在了,说明模块卸载成功。
至此,hello_drv 这个设备的整个驱动就验证完成了,驱动工作正常。以后的字符设备驱动实验基本都可以此为模板进行编写。
参考:
https://zhuanlan.zhihu.com/p/584572352
总结
上面就是Linux中的字符驱动,做嵌入式还是要把 C 语言的基础打牢,尤其是结构体、指针和链表,如果这第三个你能很好的理解那么 Linux 驱动编程就非常容易,因为驱动开发就 = 软件架构 + 硬件操作。而软件架构就需要你要非常熟悉 C 语言,硬件操作就是你单片机的那几个寄存器操作。
我的qq:2442391036,欢迎交流!