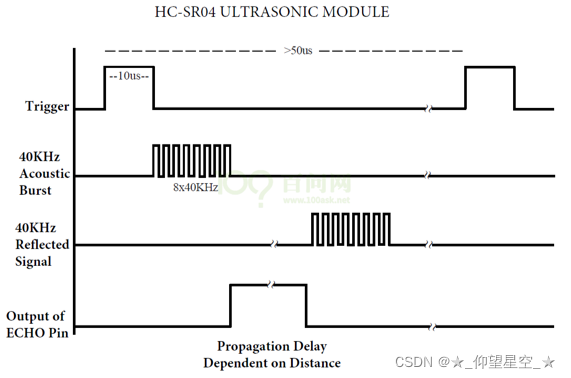
HC-SR04超声波模块
工作原理参考: 超声波模块_star-air的博客-CSDN博客_超声波模块
https://blog.csdn.net/qq_41262681/article/details/95940707
使用超声波测距的操作步骤:
- 触发:向T(脉冲触发引脚)发出一个大约10us的高电平。
- 模块就自动发出8个40Khz的超声波,超声波遇到障碍物后反射回来,模块收到返回来的超声波。
- 回响:模块接收到反射回来的超声波后,Echo引脚输出一个与检测距离成比例的高电平。
- 计算距离原理: 时间 x 速度 = 距离,获取echo引脚维持高电平的时间就可以知道时间T,声速大概340m/s, 由此可计算出距离。
编程实现的两种方法:
-
顺序执行,通过死等计算高电平时间
伪代码:
disable_irq();
while(Echo == 0); /* 等待变为高电平 */
while (Echo) /* 等待变为低电平和计算高电平时间 */
{
udelay(1)
us++;
}
enable_irq();
-
利用中断计算
设置Echo引脚为双边沿触发,在上升沿触发中断时记录此刻时刻T0,在下降沿触发中断时记录时刻T1
高电平时间 = T1 - T0
内核中获取时间的API :
ktime_get_ns(); // 获取内核启动到现在的时间,在挂起时会暂停
ktime_get_boottime_ns(); // 获取内核启动到现在的时间,不受挂起影响,是绝对时间
ktime_get_real_ns(); // 获取Unix时间(1970年)到现在的时间,可能涉及闰秒更新,用得比较少
ktime_get_raw_ns(); // 类似ktime_get_ns(),不涉及闰秒更新,用得比较少
参考文档:https://www.kernel.org/doc/html/latest/core-api/timekeeping.html#c.ktime_get_ns
驱动实现
1、设备树编写
imx6ull-mmc-npi.dts
根节点下添加HC-SR04的节点:
hc_sr04 {
compatible = "hc_sr04";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_sr04_1
&pinctrl_sr04_2>;
trig-gpios = <&gpio1 4 GPIO_ACTIVE_HIGH>;
echo-gpios = <&gpio5 1 GPIO_ACTIVE_HIGH>;
status = "okay";
};
- trig-gpios,触发引脚定义
- echo-gpios,接收信号引脚
- status ,可设置为"okay"或"disabled",表示启用或者禁用,当其他模块需要使用该gpio,可以直接将状态设置为disabled就可以取消占用,其他模块就可以使用该gpio
设备树编译:
ares@ubuntu:~/work/ebf_linux_kernel-ebf_4.19.35_imx6ul$ cat make_dtb.sh
#!/bin/sh
make ARCH=arm -j4 CROSS_COMPILE=arm-linux-gnueabihf- dtbs
将设备树拷贝系统目录:
debian@npi:~/nfs_root/driver$ cat cp_dtb_to_linux.sh
#!/bin/sh
sudo cp imx6ull-mmc-npi.dtb /usr/lib/linux-image-4.19.35-carp-imx6/
- /usr/lib/linux-image-4.19.35-carp-imx6/ ,系统存放设备树的目录
重启系统设备树生效:
sudo reboot
2、驱动编写
头文件数据结构:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/uaccess.h>
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <asm/mach/map.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/io.h>
#include <linux/device.h>
#include <linux/timer.h>
// #include <asm/spinlock.h>
#include <linux/jiffies.h>
#include <linux/platform_device.h>
#include <linux/of_irq.h>
#include <linux/wait.h>
#include <linux/sched/signal.h>
#include <linux/poll.h>
// #include <asm/atomic.h>
#include <linux/atomic.h>
#define HC_SR04_DTS_NAME "hc_sr04"
#define DEV_NAME "hc-sr04"
#define USE_GPIO_LIB 0
struct hc_sr04 {
int irq; /* 中断号 */
enum of_gpio_flags flag;
struct gpio_desc *trig_gpio; /* trig-gpio */
struct gpio_desc *echo_gpio; /* echo-gpio */
dev_t dev_no; /* 设备号 */
struct cdev chrdev;
struct class *class;
struct mutex m_lock;
wait_queue_head_t wq; /* 等待队列 */
};
static struct hc_sr04 sr04;
static int sr04_trig_gpio;
static int sr04_echo_gpio;
static int sr04_data_ns = 0;
两种方式实现一致的地方:
static atomic_t sr04_atomic = ATOMIC_INIT(1); /* 定义原子变量 */
/* 使设备只能被一个进程打开 */
static int _drv_open (struct inode *node, struct file *file)
{
if (!atomic_dec_and_test(&sr04_atomic)) {
atomic_inc(&sr04_atomic);
return -EBUSY; /* 已经打开 */
}
gpio_direction_input(sr04_echo_gpio);
gpio_direction_output(sr04_trig_gpio, 0);
return 0;
}
/* 使驱动支持多路复用IO */
static __poll_t _drv_poll(struct file *filp, struct poll_table_struct *wait)
{
__poll_t mask = 0;
// // wait_event_interruptible
// mutex_lock(&sr04.m_lock);
// poll_wait(filp, &sr04.wq, wait);
// if (sr04_val)
// {
// mask |= POLLIN | POLLRDNORM;
// }
// mutex_unlock(&sr501.m_lock);
return mask;
}
static int _drv_release(struct inode *node, struct file *file)
{
atomic_set(&sr04_atomic, 1); /* 释放时设置原子变量值为1 */
printk("hc-sr04 release\n");
return 0;
}
static struct file_operations sr04_drv_ops = {
.owner = THIS_MODULE,
.open = _drv_open,
.read = _drv_read,
.poll = _drv_poll,
.release = _drv_release,
};
/* 设备树的匹配列表 */
static struct of_device_id dts_match_table[] = {
{.compatible = HC_SR04_DTS_NAME, }, /* 通过设备树来匹配 */
};
static struct platform_driver _platform_driver = {
.probe = _driver_probe,
.remove = _driver_remove,
.driver = {
.name = HC_SR04_DTS_NAME,
.owner = THIS_MODULE,
.of_match_table = dts_match_table, /* 通过设备树匹配 */
},
};
/* 入口函数 */
static int __init _driver_init(void)
{
int ret;
printk("hc-sr04 %s\n", __FUNCTION__);
ret = platform_driver_register(&_platform_driver); //注册platform驱动
return ret;
}
/* 出口函数 */
static void __exit _driver_exit(void)
{
printk("hc-sr04 %s\n", __FUNCTION__);
platform_driver_unregister(&_platform_driver);
}
module_init(_driver_init);
module_exit(_driver_exit);
MODULE_AUTHOR("Ares");
MODULE_LICENSE("GPL");
方式1
static ssize_t _drv_read(struct file *filp, char __user *buf, size_t size, loff_t *offset)
{
int ret;
int time_us = 0;
int timeout = 1000000;
unsigned long flags;
/* 中断屏蔽 */
local_irq_save(flags);
/* 启动触发信号 */
gpio_set_value(sr04_trig_gpio, 1);
udelay(40);
gpio_set_value(sr04_trig_gpio, 0);
/* 等接收信号GPIO变为高电平*/
while (gpio_get_value(sr04_echo_gpio)==0 && timeout)
{
udelay(1);
timeout--;
}
if (timeout == 0)
{
local_irq_restore(flags);
return -EAGAIN;
}
timeout = 1000000;
while (gpio_get_value(sr04_echo_gpio)==1 && timeout)
{
udelay(1);
time_us++; /* 计算信号高电平时间 */
timeout--; /* 超时计算 */
}
if (timeout == 0)
{
printk("timeout 2\r\n");
local_irq_restore(flags);
return -EAGAIN;
}
/* 恢复中断 */
local_irq_restore(flags);
size = size > 4 ? 4 : size;
if (copy_to_user(buf, &time_us, size)) /* 将获取的时间拷贝到用户空间 */
{
ret = -EFAULT;
}
else
{
ret = size;
}
return ret;
}
- 需要注意在死等的时候要加超时机制返回,否则等不信号时系统就会卡死
方式2
与普通死等获取的方式不同的是
- 使用中断方式,在
_drv_read中只会发起启动信号
- 在中断函数
hc_sr04_isr中获取超声波时间
- 在
_driver_probe申请中断:request_irq(sr04.irq, hc_sr04_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, DEV_NAME, NULL);
- 在
_driver_remove中记得要释放中断,否则下次再insmod内核模块就使用不了该中断,必须要重启系统
static ssize_t _drv_read(struct file *filp, char __user *buf, size_t size, loff_t *offset)
{
int ret;
int timeout;
unsigned long flags;
/* 中断屏蔽 */
local_irq_save(flags);
/* 启动触发信号 */
gpio_set_value(sr04_trig_gpio, 1); //gpiod_set_value(sr04.trig_gpio, 1);
udelay(40);
gpio_set_value(sr04_trig_gpio, 0);//gpiod_set_value(sr04.trig_gpio, 0);
/* 恢复中断 */
local_irq_restore(flags);
timeout = wait_event_interruptible_timeout(sr04.wq, sr04_data_ns, HZ); /* wait 1 sec */
if (!timeout) return -EAGAIN;
if (copy_to_user(buf, &sr04_data_ns, size > 4 ? 4 : size))
{
ret = -EFAULT;
}
else
{
ret = size;
}
sr04_data_ns = 0;
return ret;
}
static irqreturn_t hc_sr04_isr(int irq_num, void *dev)
{
if (gpio_get_value(sr04_echo_gpio))
{
sr04_data_ns = ktime_get_ns();
}
else
{
sr04_data_ns = ktime_get_ns() - sr04_data_ns;
wake_up(&sr04.wq); /* 唤醒等待队列中进入休眠的进程 */
}
return IRQ_RETVAL(IRQ_HANDLED);
}
static int _driver_probe(struct platform_device *pdev)
{
int err;
struct device *sr04_dev;
struct device_node *node = pdev->dev.of_node;
if (!node) {
printk("hc-sr501 dts node can not found!\r\n");
return -EINVAL;
}
#if USE_GPIO_LIB
sr04.trig_gpio = gpiod_get(&pdev->dev, "trig", GPIOD_OUT_LOW);
if (IS_ERR(sr04.trig_gpio)) {
dev_err(&pdev->dev, "Failed to get trig-gpio for hc-sr04\n");
return PTR_ERR(sr04.trig_gpio);
}
sr04.echo_gpio = gpiod_get(&pdev->dev, "echo", GPIOD_IN);
if (IS_ERR(sr04.echo_gpio)) {
dev_err(&pdev->dev, "Failed to get trig-gpio for hc-sr04\n");
gpiod_put(sr04.trig_gpio); /* 释放trig-gpio */
return PTR_ERR(sr04.echo_gpio);
}
#else
struct device_node *dev_node = of_find_node_by_path("/hc_sr04"); /* 找到hc-sr04的设备树节点 */
if (IS_ERR(dev_node)) {
printk("hc-sr04 DTS Node not found!\r\n");
return PTR_ERR(dev_node);
}
sr04_trig_gpio = of_get_named_gpio(dev_node, "trig-gpios", 0); /* 获取trig-gpio的编号 */
if (sr04_trig_gpio < 0) {
printk("trig-gpio not found!\r\n");
return -EINVAL;
}
err = gpio_request(sr04_trig_gpio, "trig-gpios");
if(err)
{
printk("gpio_request trig-gpios is failed!\n");
return -EINVAL;
}
sr04_echo_gpio = of_get_named_gpio(dev_node, "echo-gpios", 0); /* 获取echo-gpio的编号 */
if ( sr04_echo_gpio < 0) {
printk("echo-gpio not found!\r\n");
return -EINVAL;
}
err = gpio_request(sr04_echo_gpio, "echo-gpios");
if(err)
{
gpio_free(sr04_trig_gpio);
printk("gpio_request echo-gpios is failed!\n");
return -EINVAL;
}
printk("trig-gpio %d echo-gpio %d\n", sr04_trig_gpio, sr04_echo_gpio);
sr04.irq = gpio_to_irq(sr04_echo_gpio);
#endif
err = request_irq(sr04.irq, hc_sr04_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, DEV_NAME, NULL); /* 申请中断 */
if (err) {
printk(KERN_INFO"failed to request irq %d\r\n", sr04.irq);
gpio_free(sr04_trig_gpio);
gpio_free(sr04_echo_gpio);
return err;
}
/* 内核自动分配设备号 */
err = alloc_chrdev_region(&sr04.dev_no, 0, 1, DEV_NAME);
if (err < 0) {
pr_err("Error: failed to register mbochs_dev, err: %d\n", err);
return err;
}
cdev_init(&sr04.chrdev, &sr04_drv_ops);
cdev_add(&sr04.chrdev, sr04.dev_no, 1);
sr04.class = class_create(THIS_MODULE, DEV_NAME);
if (IS_ERR(sr04.class)) {
err = PTR_ERR(sr04.class);
goto failed1;
}
/* 创建设备节点 */
sr04_dev = device_create(sr04.class , NULL, sr04.dev_no, NULL, DEV_NAME);
if (IS_ERR(sr04_dev)) { /* 判断指针是否合法 */
err = PTR_ERR(sr04_dev);
goto failed2;
}
init_waitqueue_head(&sr04.wq); /* 初始化等待队列头 */
mutex_init(&sr04.m_lock); /* 初始化互斥锁 */
printk("hc-sr04 probe success\r\n");
return 0;
failed2:
device_destroy(sr04.class, sr04.dev_no);
class_destroy(sr04.class);
failed1:
unregister_chrdev_region(sr04.dev_no, 1);
cdev_del(&sr04.chrdev);
#if USE_GPIO_LIB
gpiod_put(sr04.echo_gpio); /* 释放echo-gpio*/
gpiod_put(sr04.trig_gpio); /* 释放trig-gpio*/
#else
gpio_free(sr04_trig_gpio);
gpio_free(sr04_echo_gpio);
#endif
return err;
}
static int _driver_remove(struct platform_device *pdev)
{
device_destroy(sr04.class, sr04.dev_no);
class_destroy(sr04.class);
unregister_chrdev_region(sr04.dev_no, 1);
cdev_del(&sr04.chrdev);
free_irq(sr04.irq, NULL); /* 释放中断*/
#if USE_GPIO_LIB
gpiod_put(sr04.echo_gpio); /* 释放echo-gpio*/
gpiod_put(sr04.trig_gpio); /* 释放trig-gpio*/
#else
gpio_free(sr04_trig_gpio);
gpio_free(sr04_echo_gpio);
#endif
printk(KERN_INFO"hc-sr04 drv remove success\n");
return 0;
}
3、测试程序编写
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <sys/ioctl.h>
#include <poll.h>
#define DEV_NAME "/dev/hc-sr04"
void sleep_ms(unsigned int ms)
{
struct timeval delay;
delay.tv_sec = 0;
delay.tv_usec = ms * 1000;
select(0, NULL, NULL, NULL, &delay);
}
int main(int argc, char **argv)
{
int fd;
int ret;
struct pollfd fds[1];
/* 2. 打开文件 */
fd = open(DEV_NAME, O_RDWR); // | O_NONBLOCK
if (fd < 0)
{
printf("can not open file %s, %d\n", DEV_NAME, fd);
return -1;
}
int time_ns;
while (1)
{
if ((ret = read(fd, &time_ns, 4)) == 4)
{
printf("time %d ns %d ms, distance %d mm %d cm\r\n", time_ns, time_ns/1000000, time_ns*340/2/1000000, time_ns*340/2/1000000/10);
}
else
{
printf("not get time, err %d\r\n", ret);
}
sleep_ms(500);
}
}
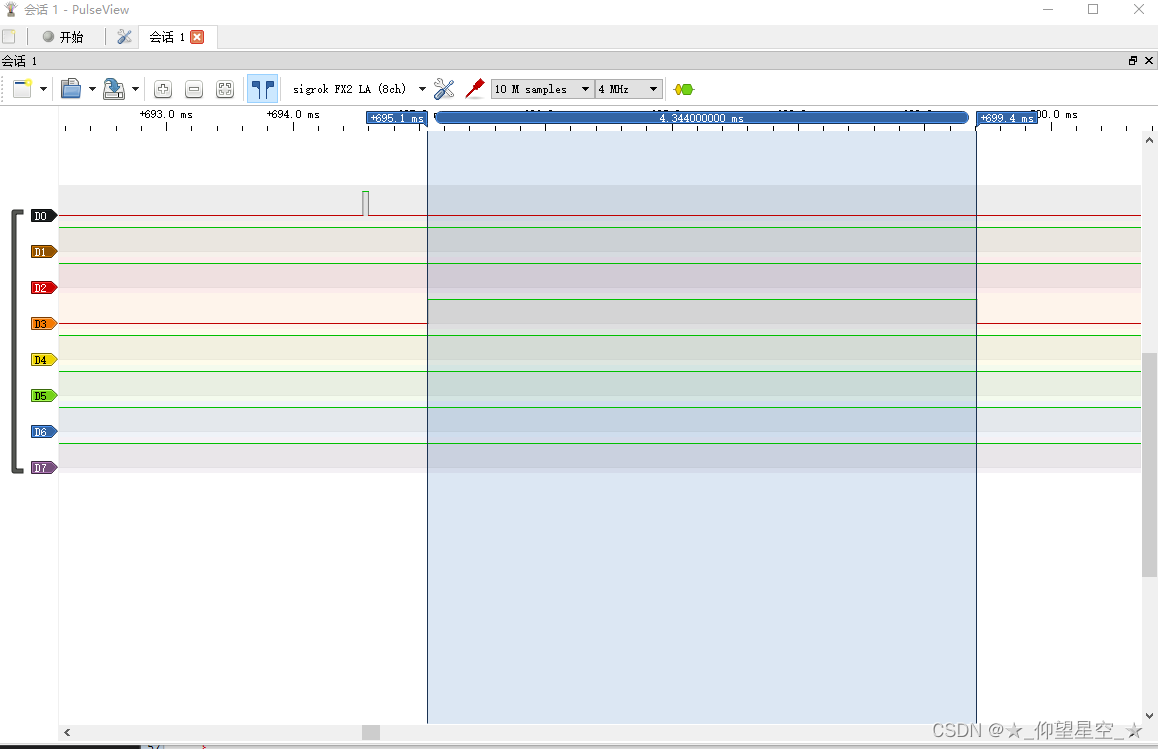
通过逻辑分析仪测量获取时间是否准确
逻辑分析仪测量的启动信号:
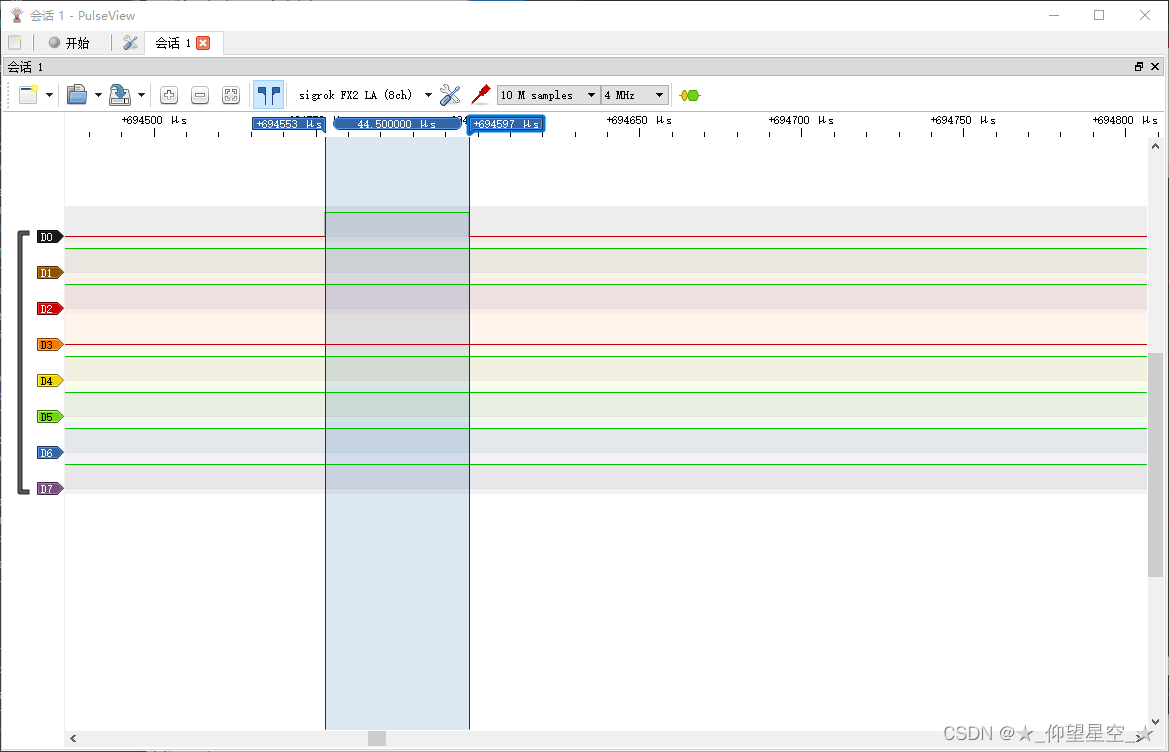
逻辑分析仪测量的距离的高电平时间: