现在的激光雷达与相机的标定程序基本都是Ubuntu框架下面的,并且都是C++代码,需要安装的依赖也比较复杂,于是自己写了一个python版本的标定程序,依赖非常简单,Windows系统也可以运行。并且代码简单一个文件搞定,符合python简单易行的风格。
先上最后标定后的效果图:
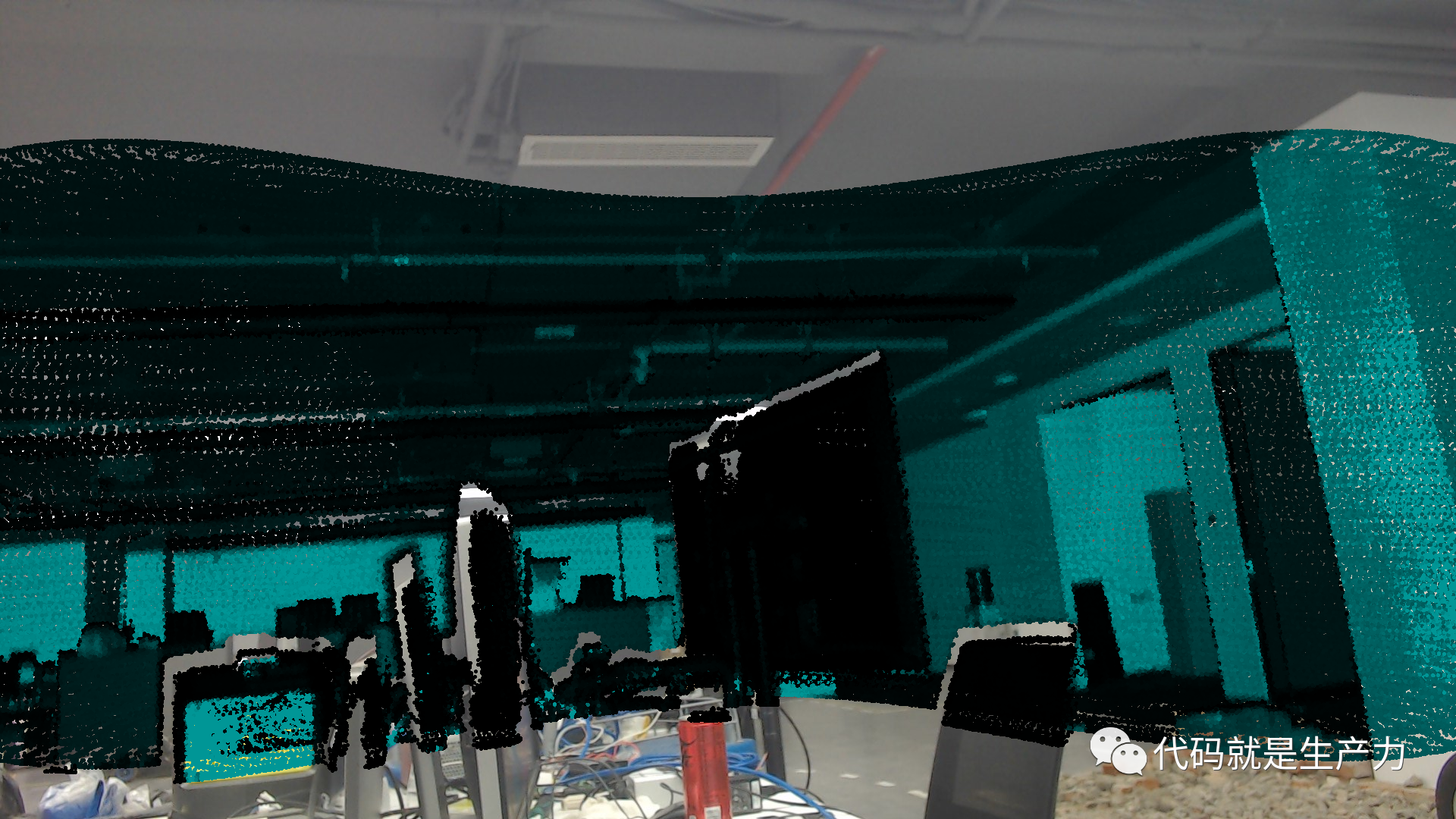

标定的思路比较简单:
1 手动在图像上面选取N个标定点
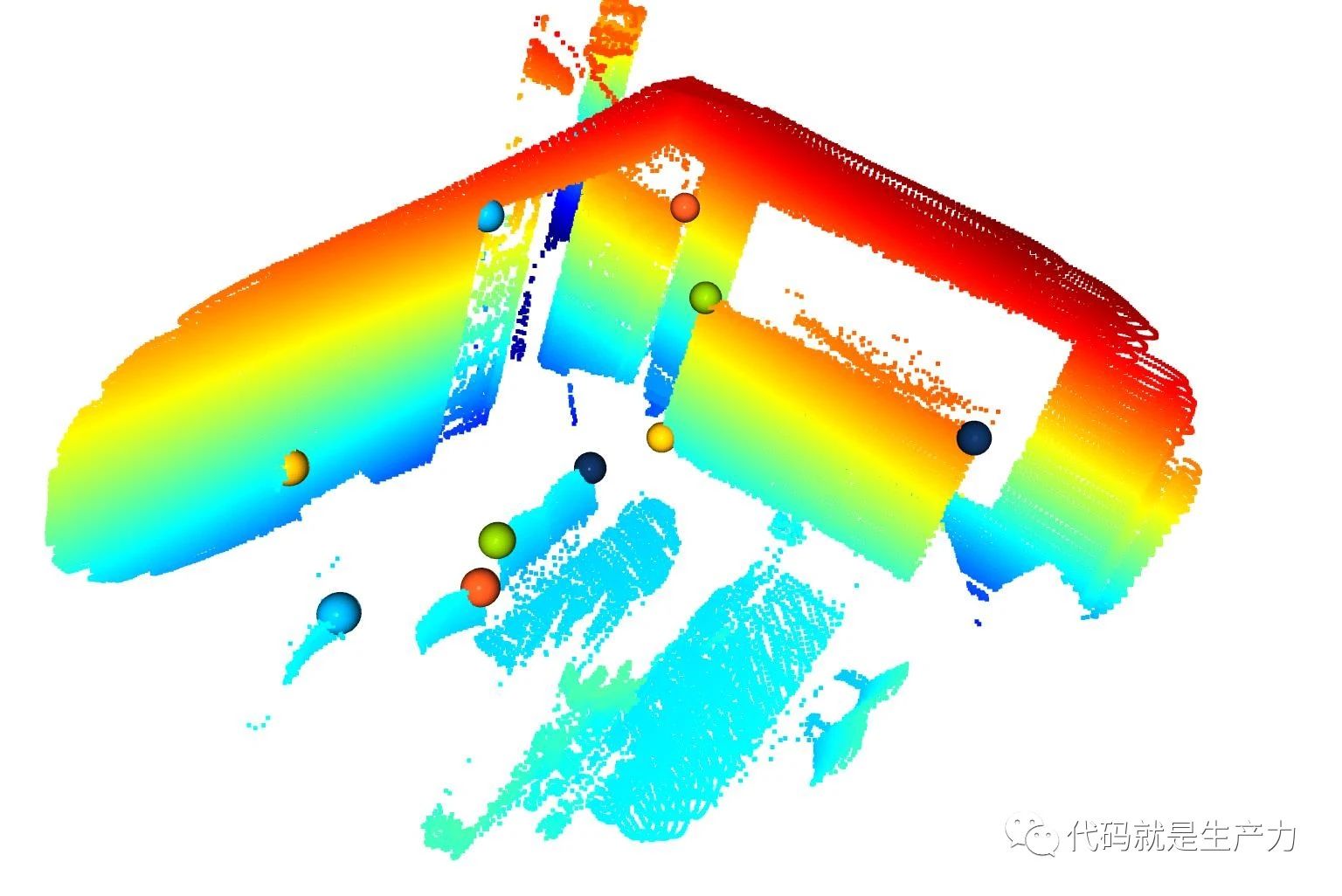
2 手动在点云上选取N个标定点(每个点都对应图像上的点,顺序也要一致)
3 通过PNP方法计算出二者的旋转投影矩阵,也就是外参矩阵
第一步的示意图:

第二步的示意图:
最后,上代码:
</