BoT-SORT: Robust Associations Multi-Pedestrian Tracking
论文:arxiv
code: github
数据:还未找到
-
文章贡献
- 运动相机的补偿和卡尔曼状态向量的选择
- IOU与reid余弦距离融合方案
-
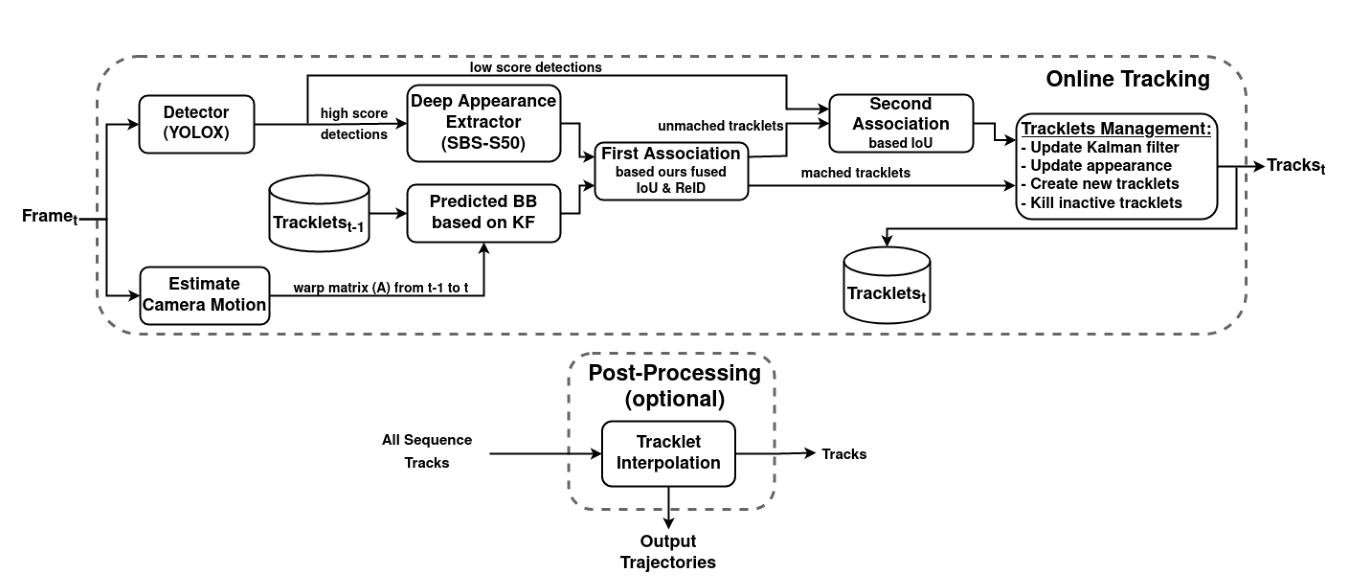
总流程
-
探索创新
-
更换了卡尔曼的状态量,以及Q,R矩阵。
- 状态量由【xc, yc, s, a, ˙xc, ˙yc, ˙】、【xc, yc, a, h, ˙xc, ˙yc, ˙a, ˙h】到【xc(k), yc(k), w(k), h(k),˙xc(k), ˙yc(k), ˙w(k), ˙h(k)】
- Q R选择跟状态向量有关,有利于预测长时间丢失的目标。
-
运动相机补偿
-
IOU与reid进行融合
-
实验部分
-
检测网络使用YOLOX
-
特征提取采用SBS-50模型,自己训练的
-
cMOTA被提出使用
-
疑惑点
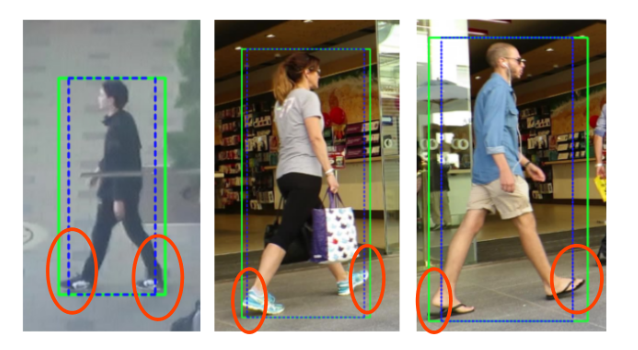
- 这个解释为更加容易跟踪,但是也是不一定对的,这样有可能增加误差。
-
疑惑点
- [外链图片转存中…(img-EnWvHjaa-1658459159605)]
- 这个解释为更加容易跟踪,但是也是不一定对的,这样有可能增加误差。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)