MicroPython的系统结构
MicroPython系统的经典结构由三部分组成,分别是微控制器硬件、MicroPython固件、用户程序。
MicroPython支持的其它类型开发板,需要自己编译源代码,产生固件,并将固件下载到微控制器中才能运行MicroPython。(此内容我们后面会讲解到,千万别好高骛远!)
MicroPython连接电脑
STM32微控制器的pyboard系列的开发板,通常都是带有原生USB 功能的开发板,在通过USB连接计算机后,默认情况下会出现两个设备:
- 虚拟磁盘(MSD)
- 虚拟串口(USB Comm Port)
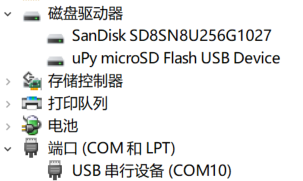
Windows系统的设备管理器中显示的pyboard设备
虚拟磁盘设备可自动被系统识别出来,就想普通的U盘一样,无论是Windows、Linux、MacOS,都会识别出一个可移动磁盘设备。如图虚拟磁盘和串口显示了Windows系统的设备管理器中发现的uPy microSD Flash USB Device磁盘设备。(如图:虚拟磁盘里面默认的四个文件)
pyboard虚拟磁盘
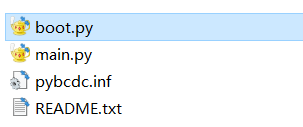
如图虚拟磁盘的卷标是“PYBFLASH”,里面默认有4个文件。这个虚拟磁盘可以像普通的U盘一样使用,能够复制文件,存放程序和数据。我们可以将编写好的 Python 程序直接复制运行,系统复位后默认从 boot.py 加载基本参数,然后从main.py开始运行。(如图:虚拟磁盘里面默认的四个文件)
pyboardUSB串口
正常情况下,串口识别出来后系统会多出一个pyboard USB Comm Port设备,具体的串口号与计算机已安装的其他设备有关。(如图:虚拟磁盘和串口)
虚拟磁盘里面pybcdc.inf文件有什么作用?
在Windows10、Linux、MacOS操作系统上(包括32位和64位操作系统),虚拟串口会自动识别,无须安装额外的驱动。但是在Win10以下的系统中,虚拟串口需要安装一个设备驱动文件才能被正确识别和使用。MicroPython的作者使用了一个非常巧妙的方法,将这个驱动文件放在了自带的虚拟磁盘中(文件名是pybcdc.inf),这样不用到网上下载就能直接安装了,非常方便。(如图:虚拟磁盘里面默认的四个文件)
注:什么是原生USB功能?
串口是指利用串行方式传输数据的接口,它是一大类接口,USB接口、RS232接口、网线RJ45接口、RS485接口、SATA接口等等都属于串口。各种串口之间的通讯协议、接口电平等并不完全相同,因此有一种串口得到另一种串口时需要转换。一般来说,串口默认是指RS232接口,所谓的USB转串口实际上就是USB转RS232装置。USB接口隶属于串口。而所谓原生,指的是芯片自身提供的接口。
虚拟磁盘和串口:
虚拟磁盘:
虚拟磁盘里面默认的四个文件:
调试工具
MicroPython和PC的标准连接是通过USB接口,使用虚拟磁盘和虚拟串口(VCP)方式。其中虚拟串口(在pyboard和STM32上可以同时使用USB虚拟串口和物理串口两种方式)是调试中最常用的方式,无须频繁复制文件避免造成Flash的损耗。
虚拟串口
USB虚拟串口通信是USB设备使用CDC类在主机上虚拟出一个串口来。在主机上使用完全和标准串口一样。CDC类定义的是设备上下文对象的类。(了解一下就行,不必深究)
REPL人机交互
在MicroPython上我们使用串口终端软件和MicroPython的REPL进行交互,发送命令。通过串口终端软件,我们可以方便地在 REPL(Read Evaluate Print Loop)中输入代码,运行和调试程序,打印结果。
Putty串口终端软件
怎样打开REPL人机交互界面? 可以使用Putty串口终端软件打开
其它常用的终端软件有:
Windows
● 超级终端(WinXP,可以在Win7/Win10下使用)
● putty
● kitty
● SecureCRT
● MobaXterm
Linux
● putty
● screen
● picocom
● minicom
MacOS
● screen
MicroPython已经移植到了很多硬件平台上,有很多不同的移植版本。但是无论哪种MicroPython的移植版本,对于串口参数的设置都是一样的:
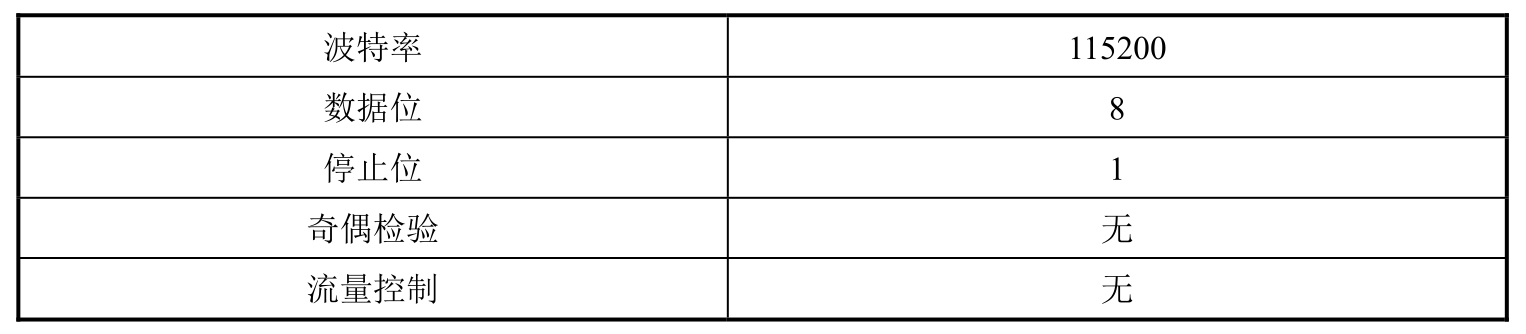
特别要注意流量控制(Flow Control)参数,很多软件默认使用硬件方式或者Xon/Xoff,在使用MicroPython时需要改为None,否则在有的终端软件中将无法输入数据。
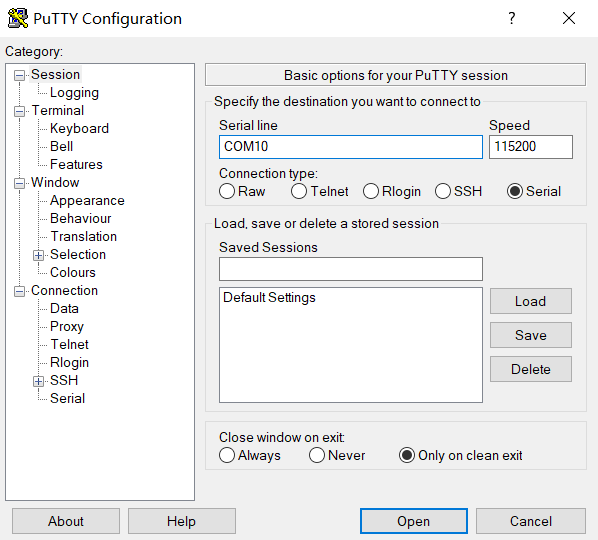
putty串口终端软件:
注:
● REPL可以和虚拟串口或者标准串口通信,它们的串口参数是一样的。
● 在一些操作系统中,虚拟串口的波特率可以随便设置,效果和设置为115200的相同。因为虚拟串口没有真正的物理串口信号,是通过驱动程序转换USB的数据。
● 极少数的 MicroPython 移植版因为硬件限制使用了不同的波特率,如Ameba RTL8915A开发板使用波特率为38400。
USB串口 = 虚拟串口 + 物理串口
上面我们有提到的虚拟串口和物理串口,其实就是USB串口,我们后面就直接叫做USB串口。我们不管它是虚拟串口还是物理串口,只要知道它就是一个USB串口,功能是通讯和数据传输,需要设置波特率和串口号就行,具体细分时再考虑虚拟串口和物理串口的区别,省的自己稀里糊涂。
打开REPL人机交互界面
在Putty里面按图(putty串口终端软件)设置好波特率和串口的端口号,然后回车就会进入REPL人机交互界面:(你可以按ctrl + c 或 ctrl + b测试是否连接上pyboard,连接上了就会有一串英文字符出现)
成功连接:
MicroPython v1.11 on 2019-05-29; PYBv1.1 with STM32F405RG
Type "help()" for more information.
MicroPython的REPL(read-evaluate-print-loop)
REPL是Read-Evaluate-Print Loop(读取-计算-输出循环)的缩写。很多编程语言都带有REPL(名称可能不完全相同),它像是一个小型的Shell,可以方便地在解释器(内核)和命令之间交互,可以方便输入各种命令,观察运行状态,因此在程序调试的时候能够起到非常大的作用。
Python语言的REPL功能非常强大,MicroPython虽然是一个微型的Python,但是它的REPL功能同样强大,通过REPL交互环境,我们可以访问pyboard,输入程序,测试代码,查找问题,查看帮助,查看磁盘文件……因为MicroPython是面向嵌入式应用的,所以MicroPython的REPL与Python的标准REPL相比,还有一些差异,快捷键不同,还提供了额外的功能和用法,如果熟练掌握这些功能就可以帮助我们更好地使用MicroPython。
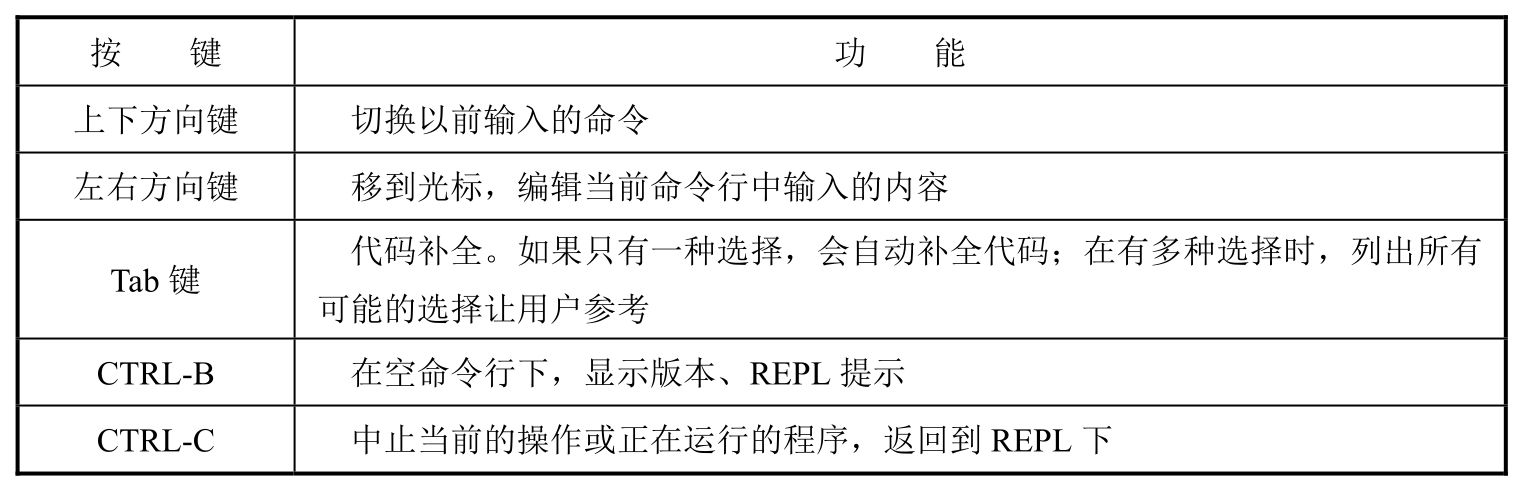
快捷键的好处:在 REPL 提供了不少快捷键,使用这些快捷键可以有效减少按键的次数,提高代码输入效率。
REPL的快捷键:

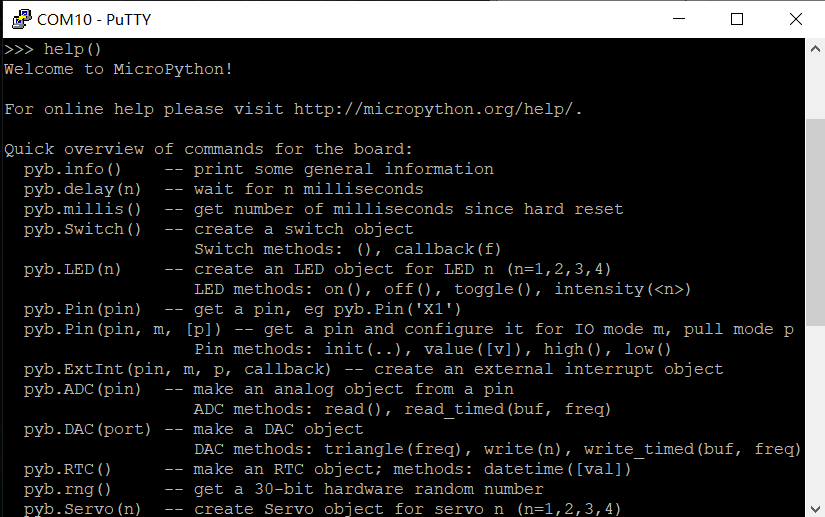
使用help()函数
在Python中可以使用help()函数查看简单的帮助,在MicroPython中同样支持help()函数。在REPL下直接输入help(),可以显示基本的帮助界面,内容是pyboard基本函数和REPL用法,可以帮助我们了解基本的命令和函数。
>>> help()
Welcome to MicroPython!
For online help please visit http://micropython.org/help/.
Quick overview of commands for the board:
pyb.info() -- print some general information
pyb.delay(n) -- wait for n milliseconds
pyb.millis() -- get number of milliseconds since hard reset
pyb.Switch() -- create a switch object
Switch methods: (), callback(f)
pyb.LED(n) -- create an LED object for LED n (n=1,2,3,4)
LED methods: on(), off(), toggle(), intensity(<n>)
pyb.Pin(pin) -- get a pin, eg pyb.Pin('X1')
pyb.Pin(pin, m, [p]) -- get a pin and configure it for IO mode m, pull mode p
Pin methods: init(..), value([v]), high(), low()
pyb.ExtInt(pin, m, p, callback) -- create an external interrupt object
pyb.ADC(pin) -- make an analog object from a pin
ADC methods: read(), read_timed(buf, freq)
pyb.DAC(port) -- make a DAC object
DAC methods: triangle(freq), write(n), write_timed(buf, freq)
pyb.RTC() -- make an RTC object; methods: datetime([val])
pyb.rng() -- get a 30-bit hardware random number
pyb.Servo(n) -- create Servo object for servo n (n=1,2,3,4)
Servo methods: calibration(..), angle([x, [t]]), speed([x, [t]])
pyb.Accel() -- create an Accelerometer object
Accelerometer methods: x(), y(), z(), tilt(), filtered_xyz()
Pins are numbered X1-X12, X17-X22, Y1-Y12, or by their MCU name
Pin IO modes are: pyb.Pin.IN, pyb.Pin.OUT_PP, pyb.Pin.OUT_OD
Pin pull modes are: pyb.Pin.PULL_NONE, pyb.Pin.PULL_UP, pyb.Pin.PULL_DOWN
Additional serial bus objects: pyb.I2C(n), pyb.SPI(n), pyb.UART(n)
Control commands:
CTRL-A -- on a blank line, enter raw REPL mode
CTRL-B -- on a blank line, enter normal REPL mode
CTRL-C -- interrupt a running program
CTRL-D -- on a blank line, do a soft reset of the board
CTRL-E -- on a blank line, enter paste mode
For further help on a specific object, type help(obj)
For a list of available modules, type help('modules')
>>>
可以通过 help(模块名或函数名)查看更详细的帮助,如查看 pyb 模块的详细帮助:
>>> help(pyb)
object <module 'pyb'> is of type module
__name__ -- pyb
fault_debug -- <function>
bootloader -- <function>
hard_reset -- <function>
info -- <function>
unique_id -- <function>
freq -- <function>
repl_info -- <function>
wfi -- <function>
disable_irq -- <function>
enable_irq -- <function>
stop -- <function>
standby -- <function>
main -- <function>
repl_uart -- <function>
usb_mode -- <function>
hid_mouse -- (1, 2, 4, 8, b'\x05\x01\t\x02\xa1\x01\t\x01\xa1\x00\x05\t\x19\x01)\x03\x15\x00%\x01\x95\x03u\x01\x81\x02\x95\x01u\x05\x81\x01\x05\x01\t0\t1\t8\x15\x81%\x7fu\x08\x95\x03\x81\x06\xc0\t<\x05\xff\t\x01\x15\x00%\x01u\x01\x95\x02\xb1"u\x06\x95\x01\xb1\x01\xc0')
hid_keyboard -- (1, 1, 8, 8, b'\x05\x01\t\x06\xa1\x01\x05\x07\x19\xe0)\xe7\x15\x00%\x01u\x01\x95\x08\x81\x02\x95\x01u\x08\x81\x01\x95\x05u\x01\x05\x08\x19\x01)\x05\x91\x02\x95\x01u\x03\x91\x01\x95\x06u\x08\x15\x00%e\x05\x07\x19\x00)e\x81\x00\xc0')
USB_VCP -- <class 'USB_VCP'>
USB_HID -- <class 'USB_HID'>
have_cdc -- <function>
hid -- <function>
millis -- <function>
elapsed_millis -- <function>
micros -- <function>
elapsed_micros -- <function>
delay -- <function>
udelay -- <function>
sync -- <function>
mount -- <function>
dht_readinto -- <function>
Timer -- <class 'Timer'>
rng -- <function>
RTC -- <class 'RTC'>
Pin -- <class 'Pin'>
ExtInt -- <class 'ExtInt'>
pwm -- <function>
servo -- <function>
Servo -- <class 'Servo'>
Switch -- <class 'Switch'>
Flash -- <class 'Flash'>
SD -- <SDCard>
SDCard -- <class 'SDCard'>
LED -- <class 'LED'>
I2C -- <class 'I2C'>
SPI -- <class 'SPI'>
UART -- <class 'UART'>
CAN -- <class 'CAN'>
ADC -- <class 'ADC'>
ADCAll -- <class 'ADCAll'>
DAC -- <class 'DAC'>
Accel -- <class 'Accel'>
LCD -- <class 'LCD'>
还可以进一步查看pyb内部模块的帮助:
>>> help(pyb.Pin)
object <class 'Pin'> is of type type
init -- <function>
value -- <function>
off -- <function>
on -- <function>
irq -- <function>
low -- <function>
high -- <function>
name -- <function>
names -- <function>
af_list -- <function>
port -- <function>
pin -- <function>
gpio -- <function>
mode -- <function>
pull -- <function>
af -- <function>
mapper -- <classmethod>
dict -- <classmethod>
debug -- <classmethod>
board -- <class 'board'>
cpu -- <class 'cpu'>
IN -- 0
OUT -- 1
OPEN_DRAIN -- 17
ALT -- 2
ALT_OPEN_DRAIN -- 18
ANALOG -- 3
PULL_UP -- 1
PULL_DOWN -- 2
IRQ_RISING -- 269549568
IRQ_FALLING -- 270598144
OUT_PP -- 1
OUT_OD -- 17
AF_PP -- 2
AF_OD -- 18
PULL_NONE -- 0
AF1_TIM1 -- 1
AF1_TIM2 -- 1
AF2_TIM3 -- 2
AF2_TIM4 -- 2
AF2_TIM5 -- 2
AF3_TIM10 -- 3
AF3_TIM11 -- 3
AF3_TIM8 -- 3
AF3_TIM9 -- 3
AF4_I2C1 -- 4
AF4_I2C2 -- 4
AF5_SPI1 -- 5
AF5_SPI2 -- 5
AF7_USART1 -- 7
AF7_USART2 -- 7
AF7_USART3 -- 7
AF8_UART4 -- 8
AF8_USART6 -- 8
AF9_CAN1 -- 9
AF9_CAN2 -- 9
AF9_TIM12 -- 9
AF9_TIM13 -- 9
AF9_TIM14 -- 9
甚至可以一级一级深入查看,如:
>>> help(pyb.Pin.board)
object <class 'board'> is of type type
X1 -- Pin(Pin.cpu.A0, mode=Pin.OUT)
X2 -- Pin(Pin.cpu.A1, mode=Pin.OUT)
X3 -- Pin(Pin.cpu.A2, mode=Pin.IN)
X4 -- Pin(Pin.cpu.A3, mode=Pin.IN)
X5 -- Pin(Pin.cpu.A4, mode=Pin.IN)
X6 -- Pin(Pin.cpu.A5, mode=Pin.IN)
X7 -- Pin(Pin.cpu.A6, mode=Pin.IN)
X8 -- Pin(Pin.cpu.A7, mode=Pin.IN)
X9 -- Pin(Pin.cpu.B6, mode=Pin.OUT)
X10 -- Pin(Pin.cpu.B7, mode=Pin.IN)
X11 -- Pin(Pin.cpu.C4, mode=Pin.IN)
X12 -- Pin(Pin.cpu.C5, mode=Pin.IN)
X17 -- Pin(Pin.cpu.B3, mode=Pin.IN, pull=Pin.PULL_UP)
X18 -- Pin(Pin.cpu.C13, mode=Pin.IN)
X19 -- Pin(Pin.cpu.C0, mode=Pin.IN)
X20 -- Pin(Pin.cpu.C1, mode=Pin.IN)
X21 -- Pin(Pin.cpu.C2, mode=Pin.IN)
X22 -- Pin(Pin.cpu.C3, mode=Pin.IN)
Y1 -- Pin(Pin.cpu.C6, mode=Pin.OUT)
Y2 -- Pin(Pin.cpu.C7, mode=Pin.OUT)
Y3 -- Pin(Pin.cpu.B8, mode=Pin.IN)
Y4 -- Pin(Pin.cpu.B9, mode=Pin.IN)
Y5 -- Pin(Pin.cpu.B12, mode=Pin.IN)
Y6 -- Pin(Pin.cpu.B13, mode=Pin.IN)
Y7 -- Pin(Pin.cpu.B14, mode=Pin.IN)
Y8 -- Pin(Pin.cpu.B15, mode=Pin.IN)
Y9 -- Pin(Pin.cpu.B10, mode=Pin.IN)
Y10 -- Pin(Pin.cpu.B11, mode=Pin.IN)
Y11 -- Pin(Pin.cpu.B0, mode=Pin.IN)
Y12 -- Pin(Pin.cpu.B1, mode=Pin.IN)
SW -- Pin(Pin.cpu.B3, mode=Pin.IN, pull=Pin.PULL_UP)
LED_RED -- Pin(Pin.cpu.A13, mode=Pin.OUT)
LED_GREEN -- Pin(Pin.cpu.A14, mode=Pin.OUT)
LED_YELLOW -- Pin(Pin.cpu.A15, mode=Pin.OUT)
LED_BLUE -- Pin(Pin.cpu.B4, mode=Pin.OUT)
MMA_INT -- Pin(Pin.cpu.B2, mode=Pin.IN)
MMA_AVDD -- Pin(Pin.cpu.B5, mode=Pin.OUT)
SD_D0 -- Pin(Pin.cpu.C8, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD_D1 -- Pin(Pin.cpu.C9, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD_D2 -- Pin(Pin.cpu.C10, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD_D3 -- Pin(Pin.cpu.C11, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD_CMD -- Pin(Pin.cpu.D2, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD_CK -- Pin(Pin.cpu.C12, mode=Pin.ALT, pull=Pin.PULL_UP, af=12)
SD -- Pin(Pin.cpu.A8, mode=Pin.IN, pull=Pin.PULL_UP)
SD_SW -- Pin(Pin.cpu.A8, mode=Pin.IN, pull=Pin.PULL_UP)
USB_VBUS -- Pin(Pin.cpu.A9, mode=Pin.IN)
USB_ID -- Pin(Pin.cpu.A10, mode=Pin.ALT_OPEN_DRAIN, pull=Pin.PULL_UP, af=10)
USB_DM -- Pin(Pin.cpu.A11, mode=Pin.ALT, af=10)
USB_DP -- Pin(Pin.cpu.A12, mode=Pin.ALT, af=10)
>>>
如果能够灵活使用help()函数,就可以查看大部分函数的基本用法和很多常量定义,甚至不需要看手册就能知道用法。
查看模块包含的变量和函数--dir()
有时候,我们需要了解一个模块内部有哪些变量和函数,在Python中是通过dir()函数查看,在MicroPython中同样也支持dir()。使用dir(),可以快速查看系统当前已经导入了哪些模块和变量:
>>> import pyb
>>> import math
>>> import os
>>> dir()
['os', 'start1', 'run', 'x1', '__name__', 'Pin', 'flag', 'Timer', 'x2', 'Echo', 'start', 'y1', 'left', 'back', 'y2', 'num', 'math', 'stop', 'Trig', 'stop1', 'pyb', 'go', 'right', 'machine']
>>>
善用help()和dir()函数,可以在调试和输入代码时,帮助我们查看内部的变量和函数名称,了解模块的功能和用法。
硬件平台之Pyboard
通常情况下,pyboard指的是MicroPython官方设计的开发板,如PYB V1.0 (也可写为PVB V10)、PYBV1.1(也可写为PVB V11)、PYBV3、PYBV4、PYB Lite 等。这些开发板的硬件和外形结构类似,功能差别也很小,主要差别在于是否带有加速度传感器、LED的数量、PCB的布局等。
但是因为 MicroPython 已经移植到了很多其他 STM32 开发板上(如STM32F4系列Nucleo开发板、STM32F4系列Discovery开发板),并且在这些STM32的开发板运行MicroPython时,基本功能和用法都类似,所以我们也可以把这些开发板称为pyboard。
那如何查看板子的型号:在REPL里面按ctrl + b(如果按不出来就先按ctrl + c 停止当前板子程序运行,特别是程序里面存在while循环时)就会显示你板子的型号引脚芯片的型号。
>>>
MicroPython v1.11 on 2019-05-29; PYBv1.0 with STM32F405RG
Type "help()" for more information.
>>>
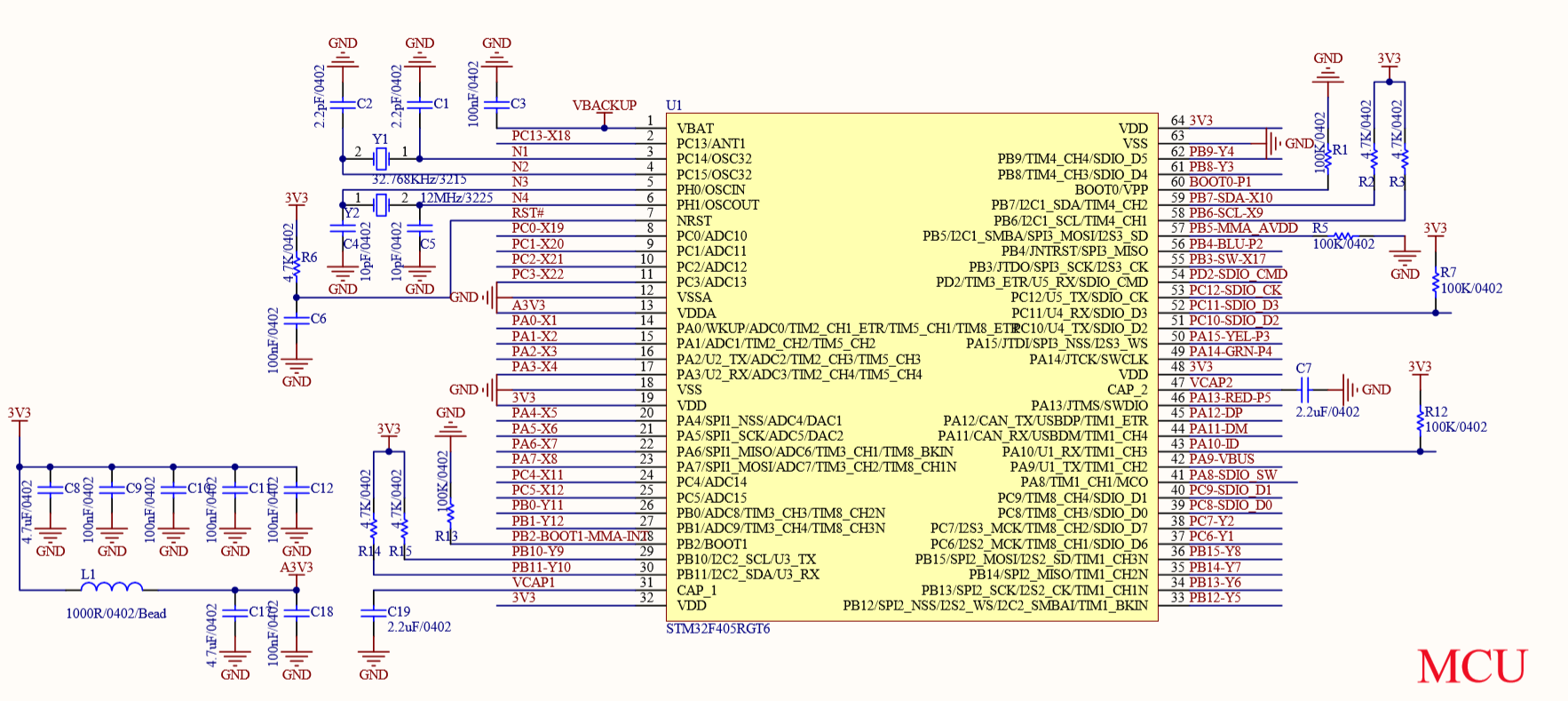
我这个板子的型号是PYBv1.0,芯片是STM32F405RG。
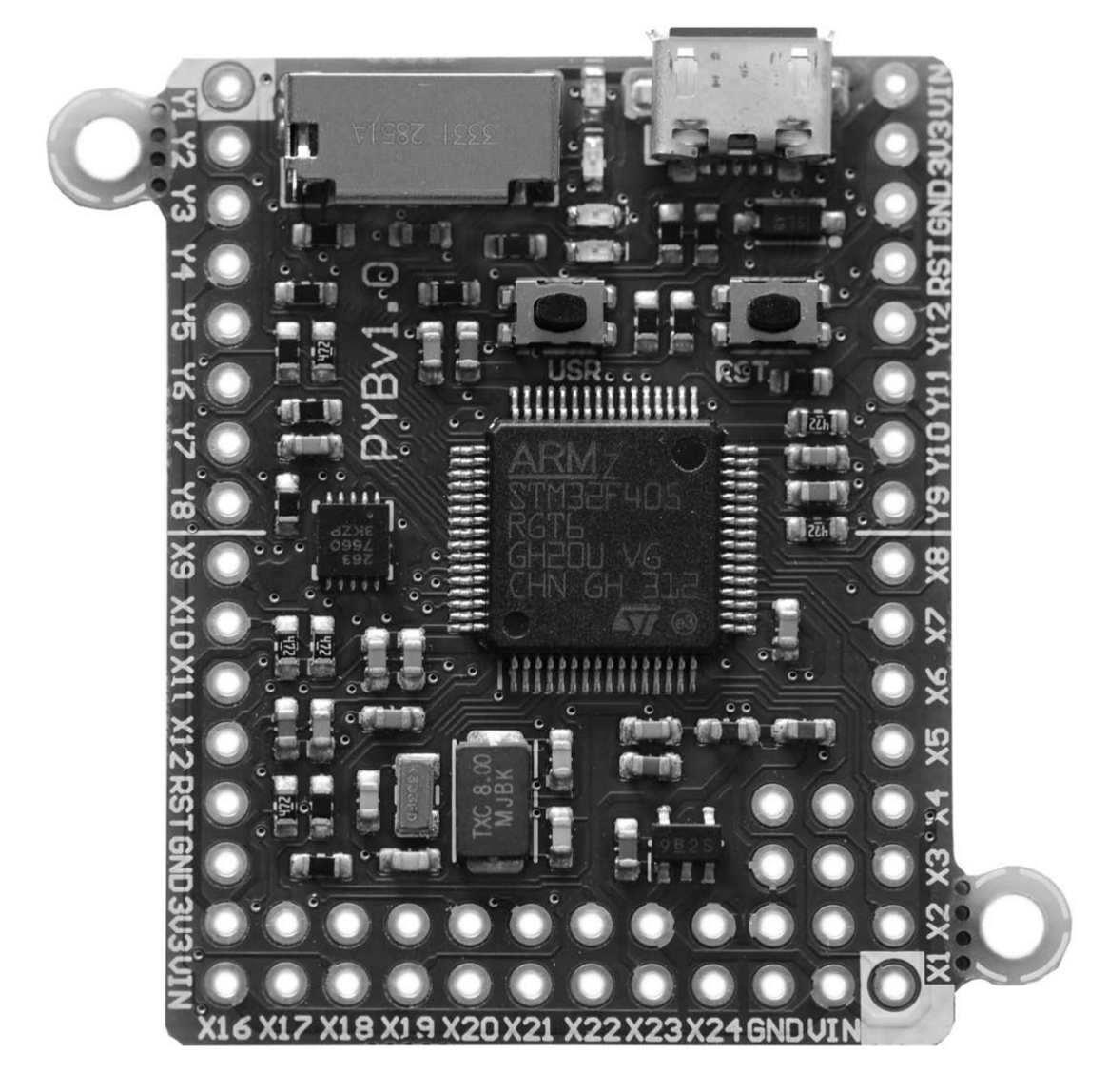
官方的 pyboard(PYBv1x 系列)使用了 64 脚 LQFP64 封装的高性能STM32F405RGT6微控制器,它的主要特点有:
● 1MB Flash和196KB SRAM
● 168MHz主频
● RTC实时时钟
● 51个通用GPIO
● 17个定时器
● 多路PWM输出
● 16路ADC输入
● 2路DAC输出
● 3个I2C接口
● 4个UART接口
● 3个SPI接口
● 一个USB2.0全速接口
● 2个CAN接口
● SDIO接口
● 硬件随机数发生器
● 唯一ID号
● 1.8~3.6V工作电压
pyboard的主要功能:
● 一个复位按键
● 一个用户按键
● 4个不同颜色的LED(其中两个带有亮度调节功能)
● MMA7660C三轴加速度传感器
● microSD插座
除了 MicroPython 软件是开源的,pyboard 的硬件同样也是开源的。在github相关资料:https://github.com/RT-Thread-packages/micropython
原理图:https://micropython.org/resources/PYBv11.pdf
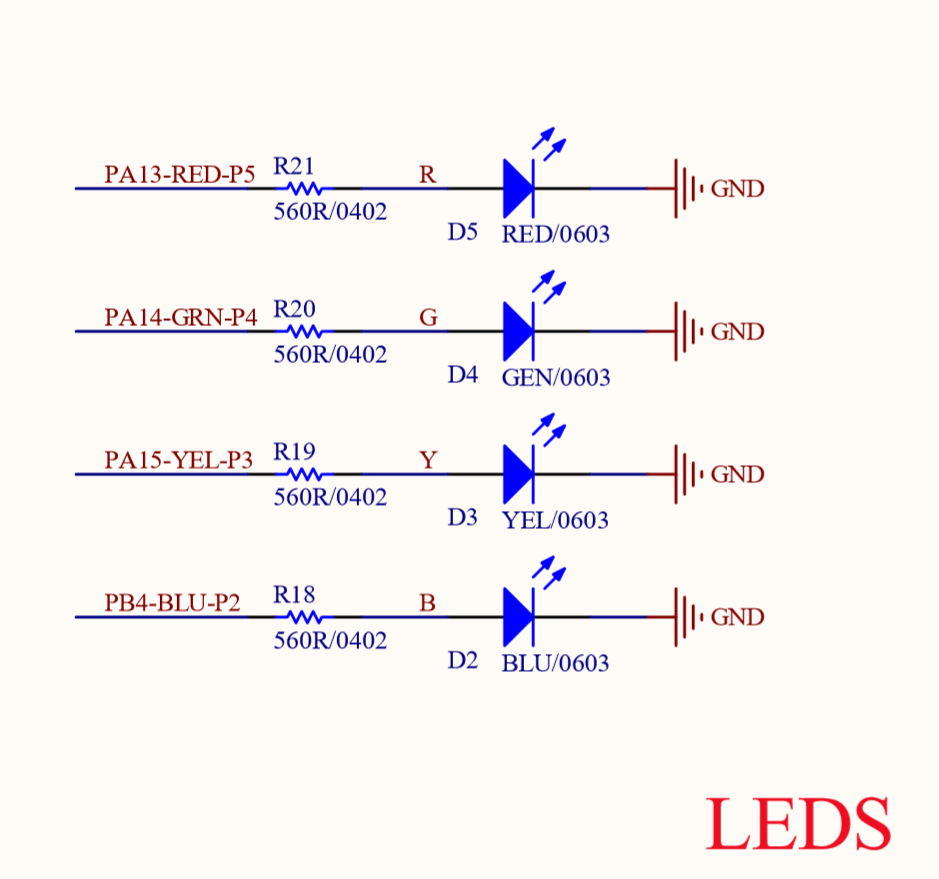
PYB V10使用了PA13、PA14、PA15、PB4四个GPIO控制LED,每个LED的颜色都不同。其中PA15也是TIM2_CH1,PB4是TM3_CH1,所以这两个GPIO支持PMW功能,可以通过调整PWM输出占空比改变LED的亮度。另外两个LED不支持亮度调节功能。
MCU
LED(1-4)
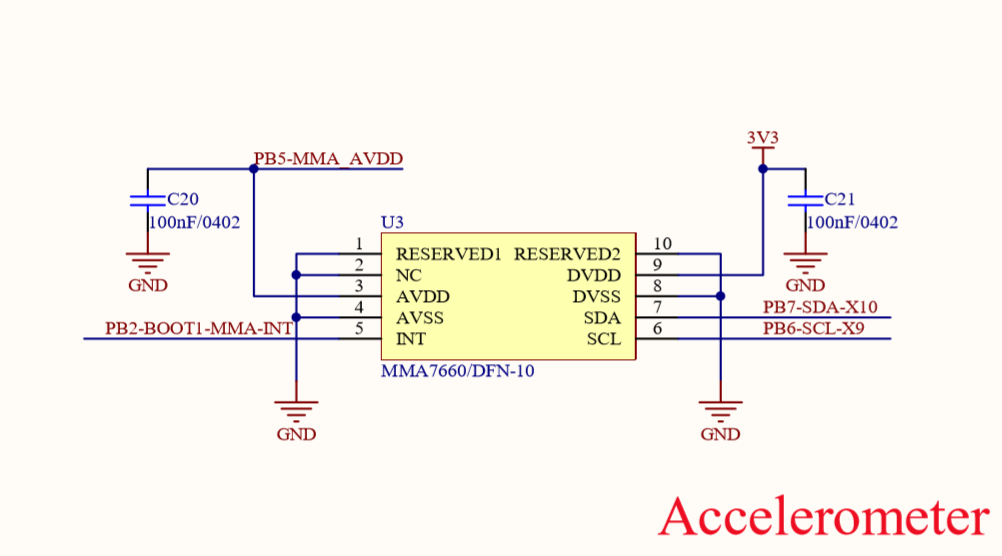
三轴加速器
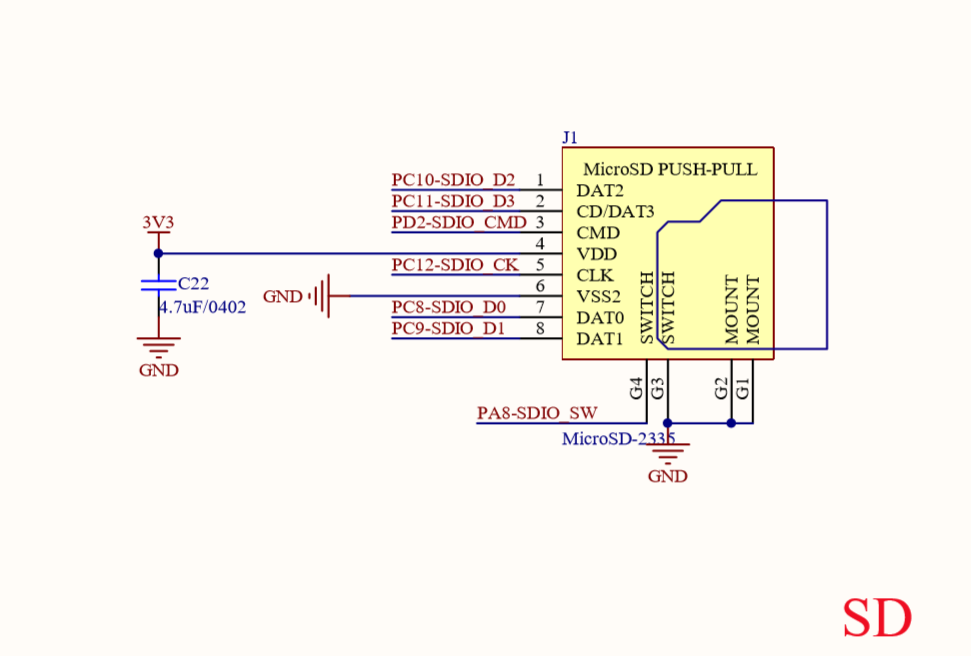
SD存储卡
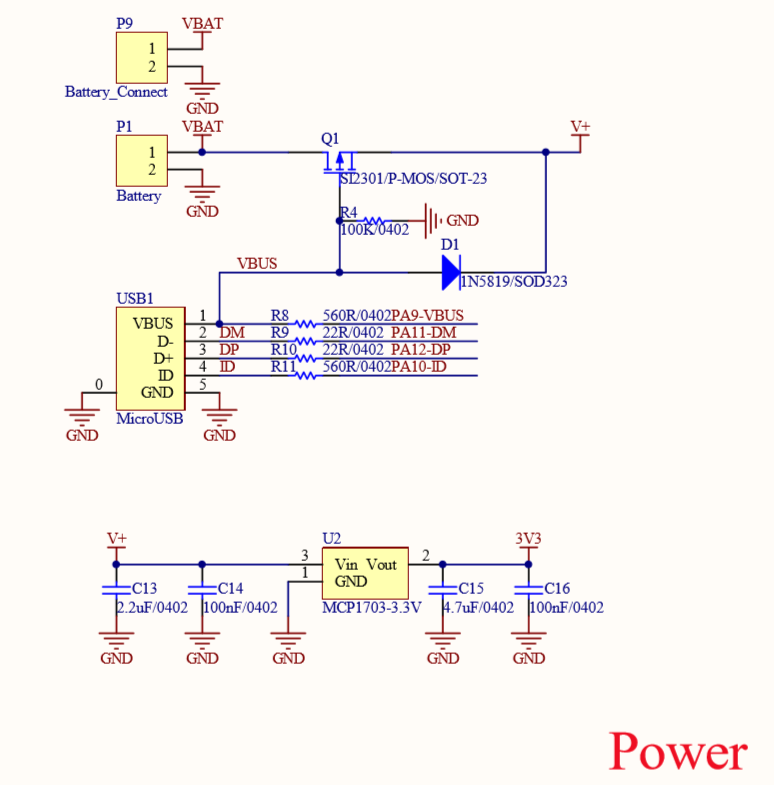
Power电源分配
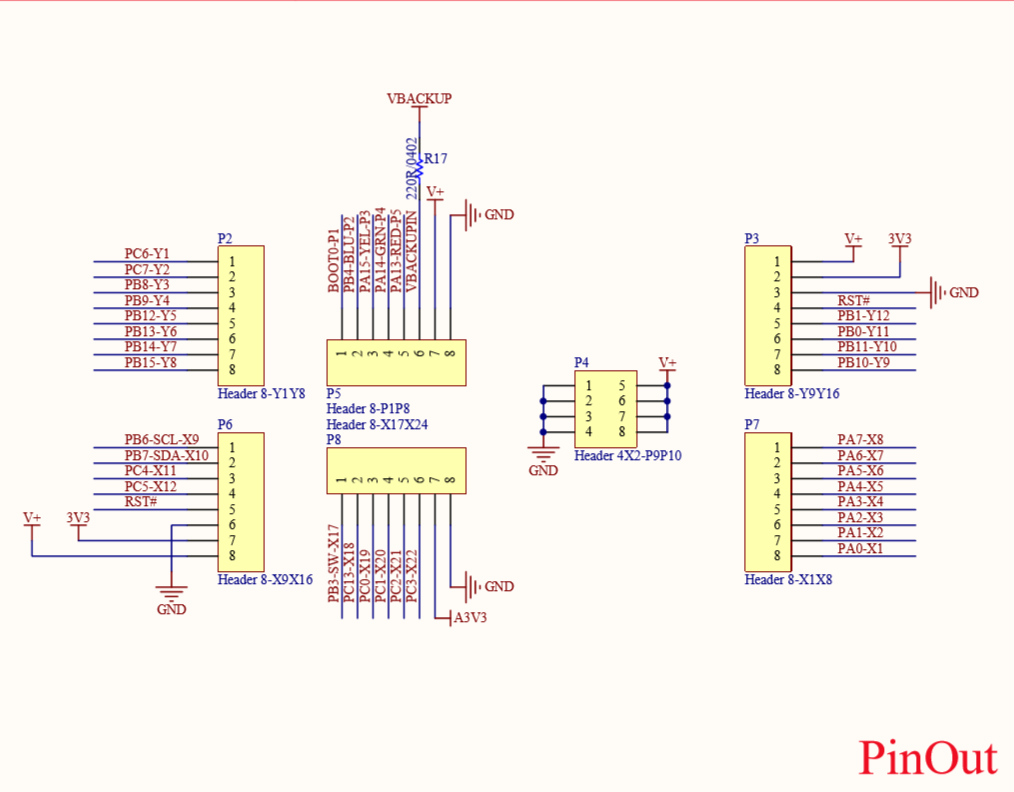
引出的I/0口端子
用户按键SW2使用PB3,通过内部上拉电阻连接到VCC,按下SW2时PB3输入低电平。不过因为PB3上没有电容去抖(可以自己增加一个0.1μF的电容),所以在按键时容易出现抖动问题。
加速度传感器MMA7660连接到MCU的I2C1上,传感器的中断输出连接PB2,传感器的模拟电源通过 PB5 提供(这是因为传感器的功耗很低,需要的电流很小)。这样就可以通过PB5控制传感器是否工作了。
microSD连接到MCU的SDIO接口上,因此PYB V10访问SD卡的速度并不慢,比通过SPI方式快很多,而PA8用于检测SD卡是否插入。
系统主时钟由 8MHz 的外部无源振荡器提供,也可以使用其他频率的时钟(4-26MHz),但是频率必须是整数倍,这样才能支持USB功能。而32kHz晶体为系统提供RTC时钟信号。
PYB V10的四周是用于扩展的接口,使用了2.54mm的标准间距,可以焊接排针或者排母。官方开发板上使用的是排母,可以连接液晶、蜂鸣器、触摸按键等专用扩展板。不过焊接排针更适合使用杜邦线连接到各种传感器。
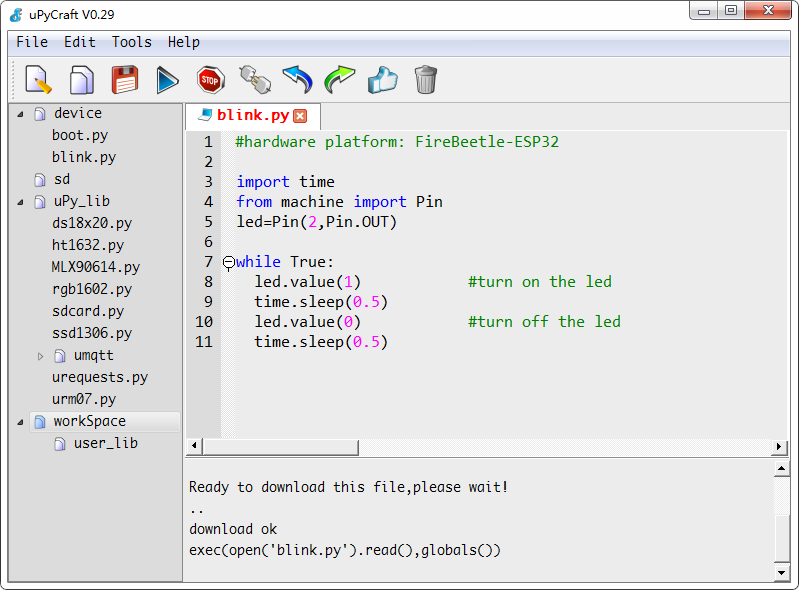
编译器:uPyCraft IDE (Windows)
下一章节:Pyboard基本功能快速浏览