如何理解PID
PID这个名词一般是电子信息类的学生都不会陌生,它是控制领域非常常见的算法,并且经久不衰。P(比例),I(积分),D(微分)。为什么需要用到PID呢,打一个比方,一个12v的电池装到小车上,设置50%的占空比,相当于在小车电机上的电压是6V,我们设想的是小车按照这个占空比的速度运行下去,但是随着时间的推移,尽管我们的占空比没有发送变化,但是作用在电机两端的电压发生变化,50%的占空比下的电压就降低了,小车无法按照其恒定的速度运行。当我们需要让小车按照恒定的速度运行,就需要增加占空比,那么如何去增加,怎么去增加,就需要用到PID。
再举一个比较生动的例子吧,我们要去洗澡,我们想要把水的温度调到合适的值,我们的需要水温就是一个参考输入,我们感受到的水温就是一个输出,我们是结合感受到的水温和我们理想的水温一开始我们会比较大幅度的旋转控制的按钮(这个过程就是一个比例控制,因为当前的凉水和我们需要的热水温度差值很大,通过较大幅度的旋转旋钮),让水温从凉水到热水。但是一般我们不可能一下子就可以达到理想水温,我们感受到的温度和我们实际的温度之间还是有差值的(误差的),而且在这个过程中。通过一段时间感受其温度的差值,我们会微调旋钮,让我们水的温度最后达到我们理想的温度,这个过程就是积分控制,就是对水温误差进行一段时间的累计,从而进行调节。但是在这个过程中肯定是会出现水温一会比较烫,一会比较冷的震荡过程。这个时候就需要进行微分控制,什么是微分控制呢,微分就是一种阻尼,来对震荡进行抑制的,并且减少超调。微分控制就是来看误差的变化量的,从而产生阻尼作用来抑制震荡。在误差来临之前提前引入一个有效的修正信号,有利于提供输出响应的快速性,提高输出响应的快速性,减小超调、克服震荡,加快系统的响应速度。

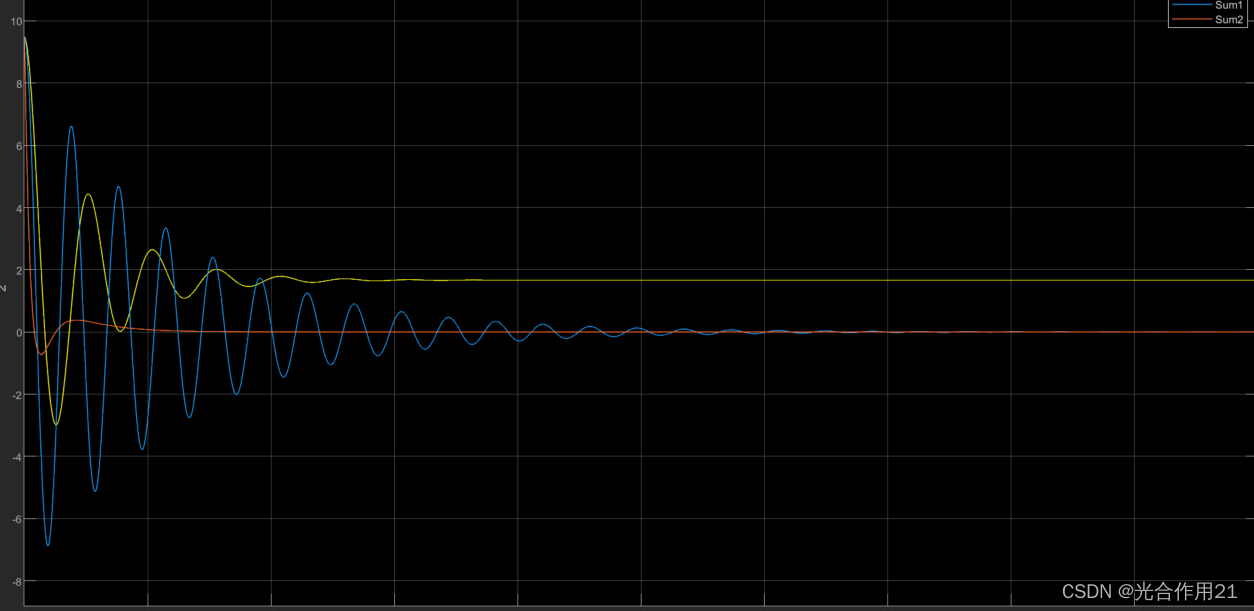
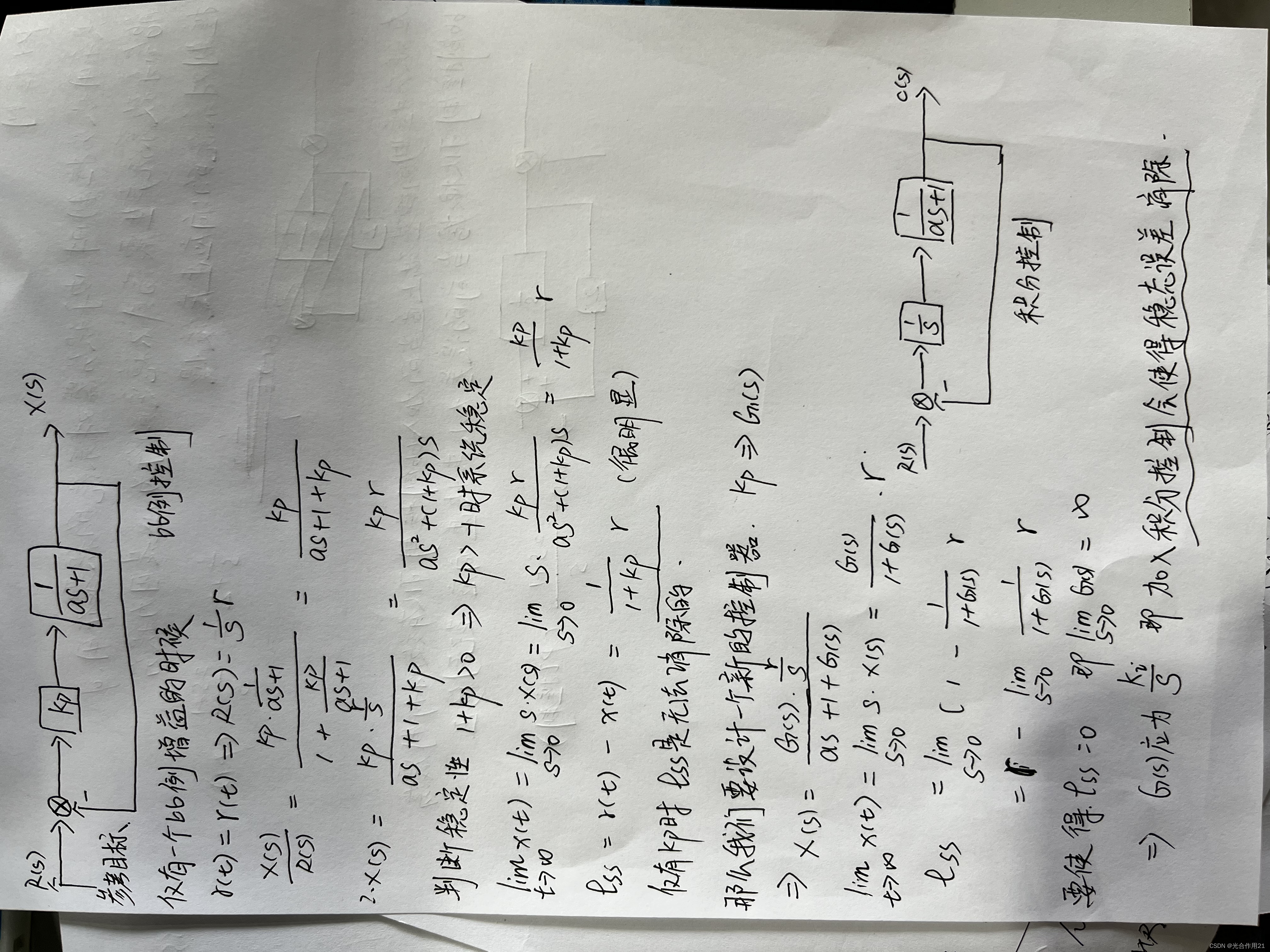
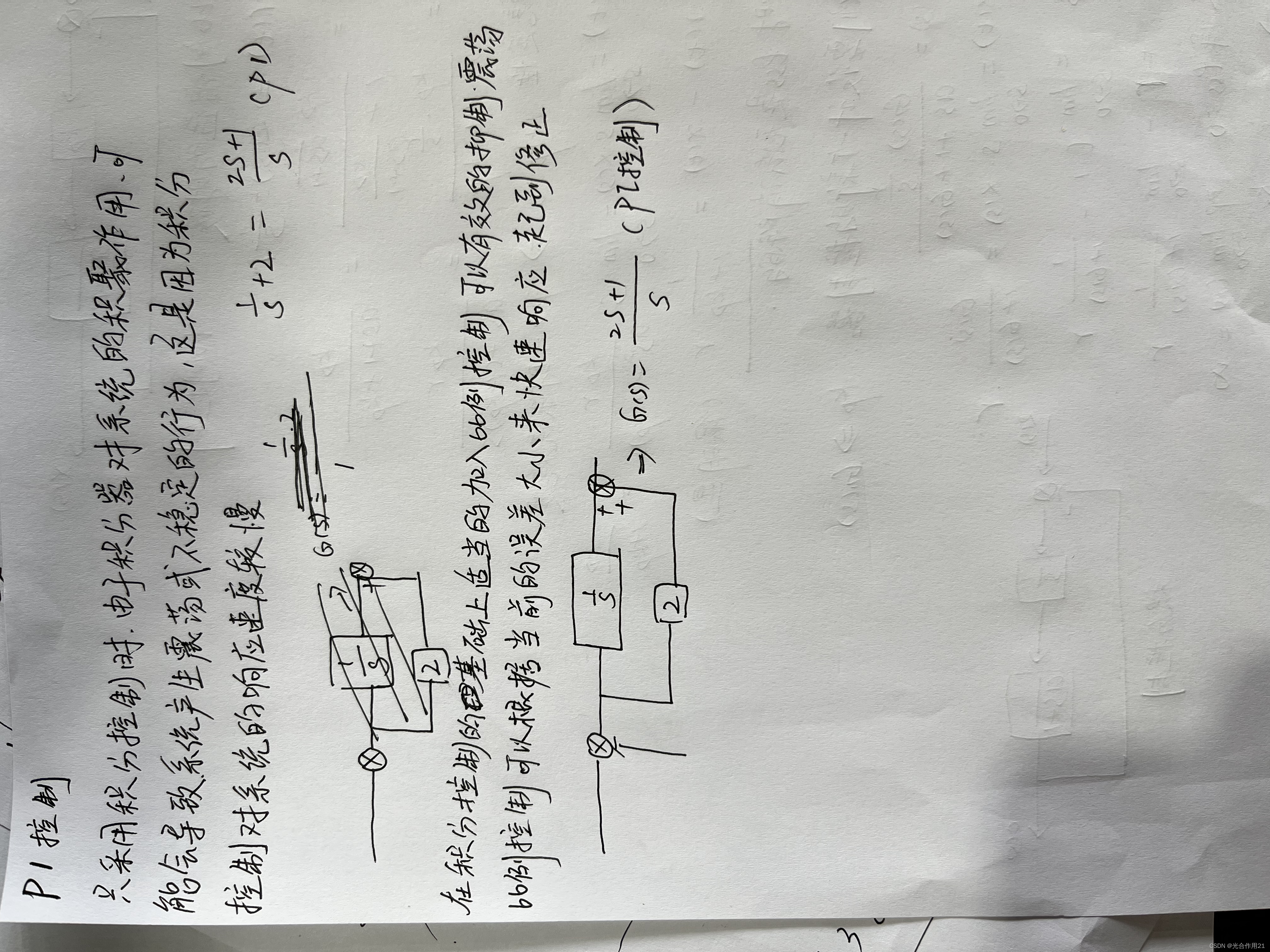
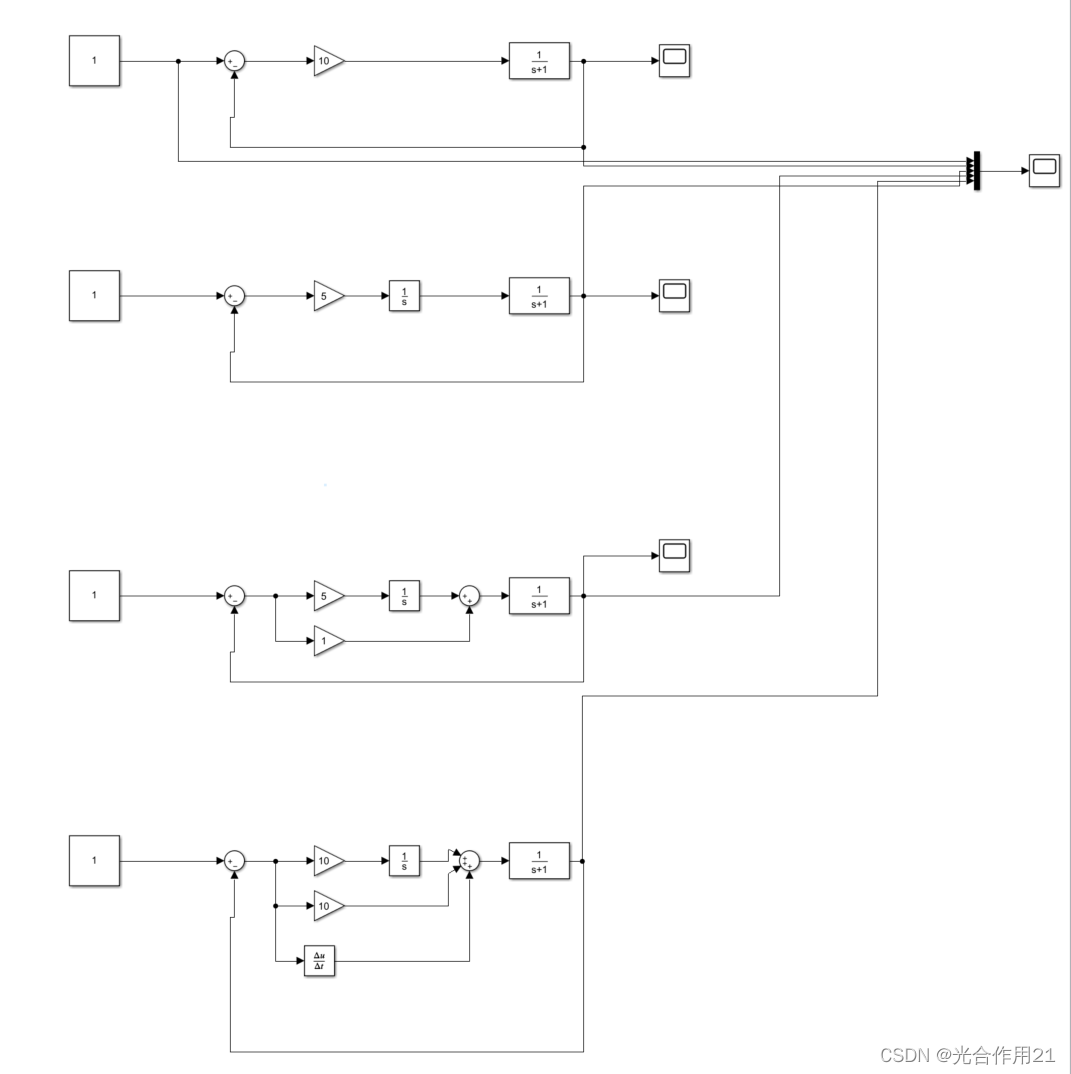
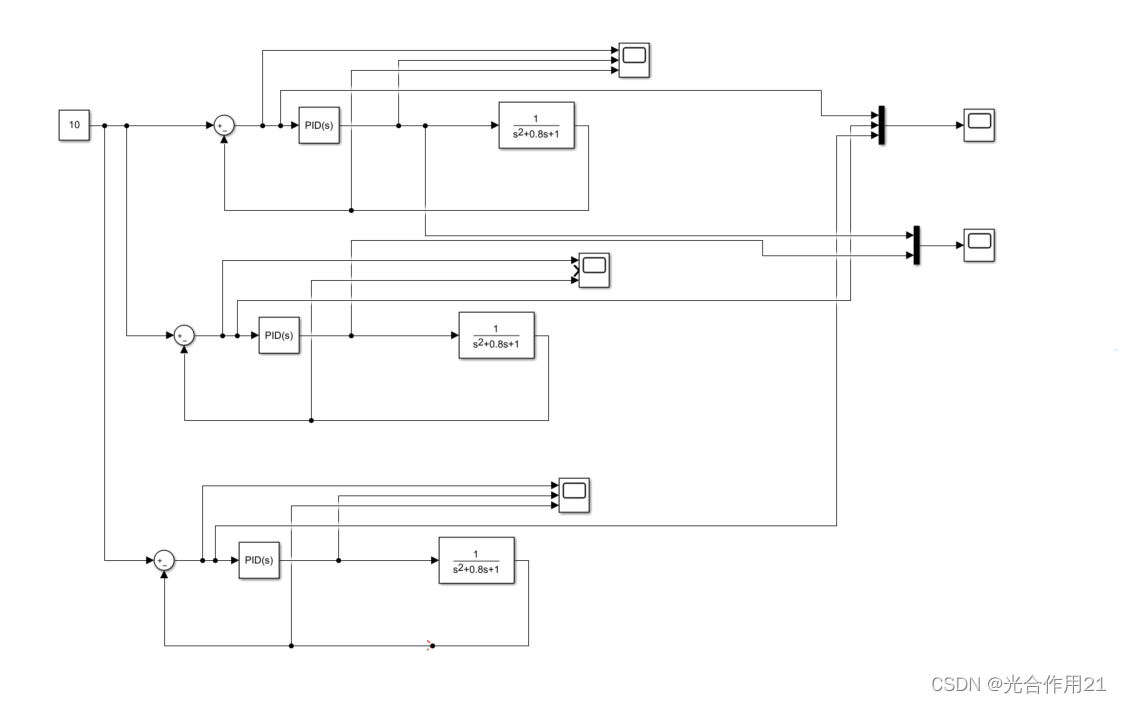
以下是一下理论的推导和Simlink的仿真:
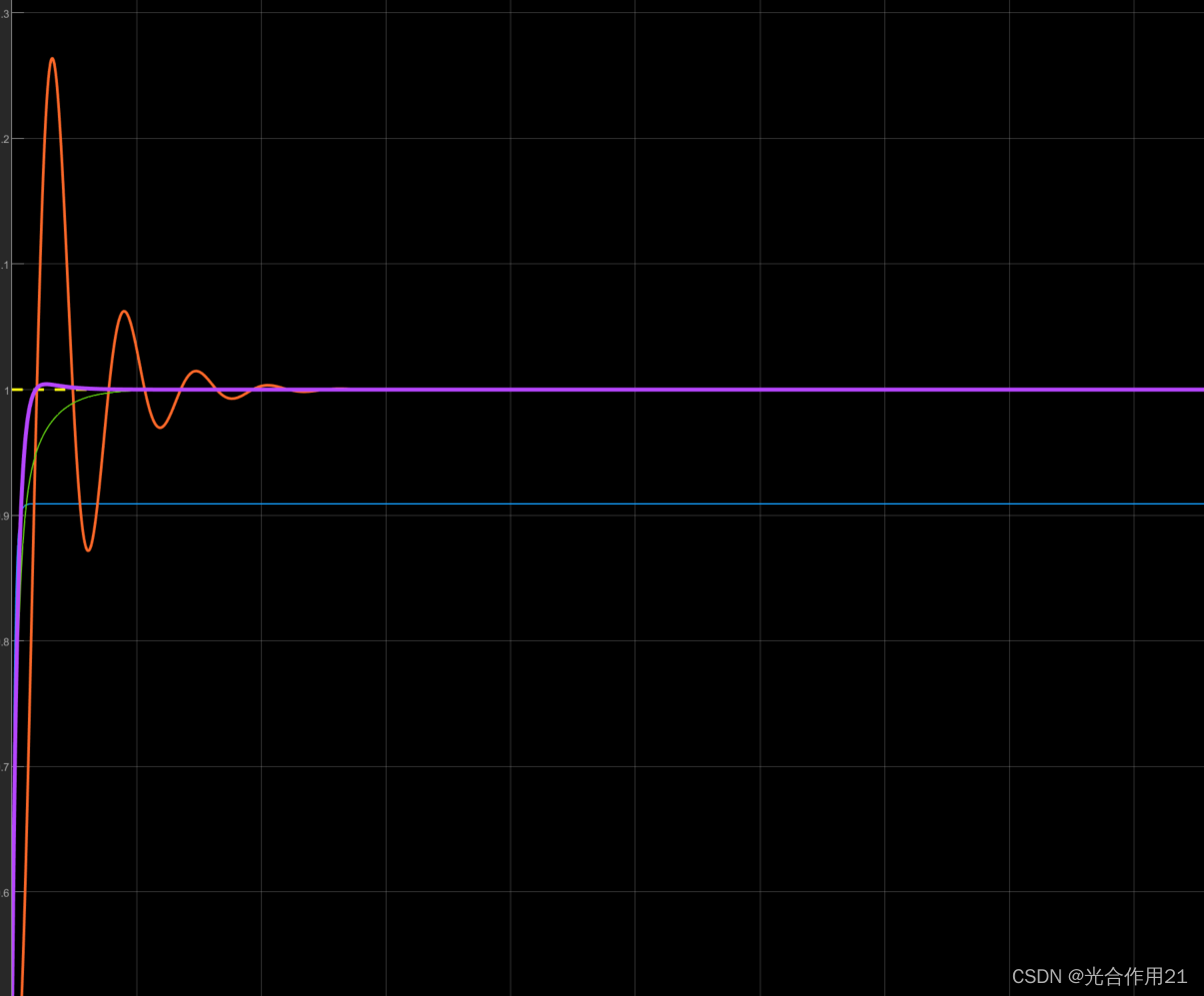
图中黄色虚线是我们的参考输入
图中蓝色线是我们只有P控制时
图中橙色线是我们只有I控制时
图中绿色线是我们PI控制时
图中紫色线是PID控制时
P 偏差产生的时候立即产生控制作用来减少产生的误差,可以迅速的反应误差
I 在比例环节产生的静态无,在积分环节中,主要提高系统环节用于就是消除静态误差
D 微分环节的作用是反应系统偏差的一个变化起始,积分环节消除了静态误差,但是降低了系统的响应速度,对于较大惯性的被控对象使用PI系统会产生较大的超调和振荡,可以引入微分根据偏差量的变化趋势提前给出较大的控制作用,将偏差消灭在萌芽状态,有助于系统减小超调,克服震荡,加快系统的响应速度,减小调节时间,改善系统的动态性能