I2C总线简介
I2C总线介绍
I2C(Inter-Integrated Circuit)总线(也称IIC或I2C)是由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备,是微电子通信控制领域广泛采用的一种总线标准。它是同步通信的一种特殊形式,具有接口线少,控制方式简单,期间封装形式少,通信速率高等优点。
I2C总线特征
两条总线线路:一条串行数据SDA,一条串行时钟线SCL来完成数据的传输及外围器件的扩展
I2C总线上的每一个设备都可以作为主设备或者从设备,而且每一个设备都会对应一个唯一的地址
I2C总线数据传输速率在标准模式下可达100kbit/s,快速模式下可达400kbit/s,高速模式下
可达3.4Mbit/s。一般通过I2C总线接口可编程时钟来实现传输速率的调整,同时也跟所接的上拉电阻的阻值有关。
I2C总线上的主设备与从设备之间以字节(8位)为单位进行单双工的数据传输。
I2C总线物理·拓扑结构
I2C 总线在物理连接上分别由SDA(串行数据线)和SCL(串行时钟线)及上拉电阻组成。通信原理是通过对SCL和SDA线高低电平时序的控制,来产生I2C总线协议所需要的信号进行数据的传递。在总线空闲状态时,这两根线一般被上面所接的上拉电阻拉高,保持着高电平。

I2C总线协议
I2C协议规定: 总线上数据的传输必须以一个起始信号作为开始条件,以一个结束信号作为传输的停止条件。起始和结束信号总是由主设备产生。
空闲状态: SCL和SDA都保持着高电平。
起始信号: 当SCL为高电平而SDA由高到低的跳变,表示产生一个起始条件
结束信号:当SCL为高而SDA由低到高的跳变,表示产生一个 停止条件

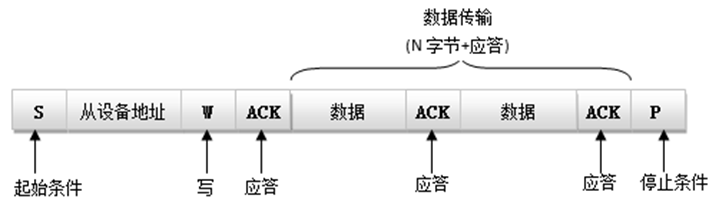
数据传输
数据传输以字节为单位 , 主设备在SCL线上产生每个时钟脉冲的过程中将在SDA线上传输一个数据位,数据在时钟的高电平被采样,一个字节按数据位从高位到低位的顺序进行传输
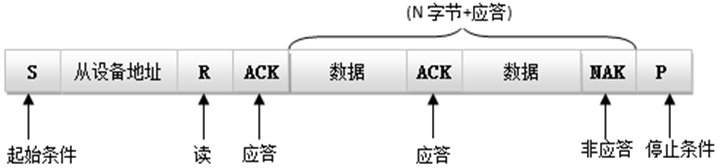
主设备在传输有效数据之前 要先指定从设备的地址,一般为7位,然后再发生数据传输的方向位, 0表示主设备向从设备写数据,1表示主设备向从设备读数据
应答信号
接收数据的器件在接收到 8bit 数据后,向发送数据的器件发出低电平的应答信号,表示已收到数据。这个信号可以是主控器件发出,也可以是从动器件发出。总之,由接收数据的器件发出。

I2C总线读写操作
主设备往从设备写数据
主设备读从设备数据
主设备读从设备的某个寄存器

STM32F4-I2C控制器特性
软件模拟I2C时序
由于直接控制 GPIO 引脚电平产生通讯时序时,需要由 CPU 控制每个时刻的引脚状态,所以称之为“软件模拟协议”方式。
硬件控制产生I2C时序
STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种由硬件外设处理 I2C协议的方式减轻了 CPU 的工作,且使软件设计更加简单。

I2C的主要特点
● I2C总线规范 rev03 兼容性:
- 从机模式和主机模式
- 多主机功能
- 标准模式(高达 100kHz )
- 快速模式(高达 400kHz )
- 超快速模式(高达 1 MHz )
- 7 位和 10 位地址模式
- 软件复位
● 1 字节缓冲带 DMA 功能
STM32F4-I2C通讯引脚
STM32芯片有多个I2C外设,它们的I2C通讯信号引出到不同的GPIO引脚上,使用时必须配置到这些指定的引脚。

EEPROM简介
EEPROM介绍
EEPROM (Electrically Erasable Programmable read only memory),带电可擦可编程只读存储器–一种掉电后数据不丢失的存储芯片。 EEPROM 可以在电脑上或专用设备上擦除已有信息,重新编程。
EEPROM常用来存储一些配置信息,以便系统重新上电的时候加载之。EEPOM 芯片最常用的通讯方式就是 I 2 C 协议

24CXX简介
AT24XX芯片容量
XX表示:01、02、04、16、32、64、……
单位: Kbit
AT24XX芯片引脚


24C65设备地址

24CXX的设备地址:
24CXX的设备地址为7位:
高4位恒定为 1010
低3位取决于A0-A2的电平状态
注:一般主机在读写24CXX都是把设备地址连同读写位组合成一个字节一起发送
24C65硬件原理图

设备地址:
读地址: 1010 0001 即 0xA1
写地址: 1010 0000 即 0xA0
24C65读写时序


/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
** This notice applies to any and all portions of this file
* that are not between comment pairs USER CODE BEGIN and
* USER CODE END. Other portions of this file, whether
* inserted by the user or by software development tools
* are owned by their respective copyright owners.
*
* COPYRIGHT(c) 2018 STMicroelectronics
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
* 1. Redistributions of source code must retain the above copyright notice,
* this list of conditions and the following disclaimer.
* 2. Redistributions in binary form must reproduce the above copyright notice,
* this list of conditions and the following disclaimer in the documentation
* and/or other materials provided with the distribution.
* 3. Neither the name of STMicroelectronics nor the names of its contributors
* may be used to endorse or promote products derived from this software
* without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE
* IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE
* FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL
* DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR
* SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
* CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY,
* OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
* OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f4xx_hal.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* Private variables ---------------------------------------------------------*/
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE END PFP */
/* USER CODE BEGIN 0 */
#define ReadAddr 0xA1
#define WriteAddr 0xA0
uint8_t Wbuf[20] = "EEPROM TEST OK!";
uint8_t Rbuf[20] = {0};
int fputc(int ch, FILE *p)
{
while(!(USART1->SR & (1<<7)));
USART1->DR = ch;
return ch;
}
/********* 24C65 写数据函数*****************************/
void Eeprom_Write(uint16_t MemAddr, uint8_t *Wbuf, uint16_t len )
{
while(len--)
{
while(HAL_I2C_Mem_Write(&hi2c1, WriteAddr, MemAddr, I2C_MEMADD_SIZE_16BIT, Wbuf, 1, 100) != HAL_OK){};
MemAddr++;
Wbuf++;
}
}
/********* 24C65 读数据函数*****************************/
void Eeprom_Read(uint16_t MemAddr, uint8_t *Rbuf, uint16_t len )
{
while(HAL_I2C_Mem_Read(&hi2c1, ReadAddr, MemAddr, I2C_MEMADD_SIZE_16BIT, Rbuf , len, 100) != HAL_OK );
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
*
* @retval None
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration----------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_I2C1_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
printf("this is i2c eeprom test\n");
Eeprom_Write(0, Wbuf, sizeof(Wbuf) );
HAL_Delay(500);
Eeprom_Read(0 , Rbuf, sizeof(Rbuf));
printf("READ: %s\n", Rbuf);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
/**Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 25;
RCC_OscInitStruct.PLL.PLLN = 336;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 4;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/**Configure the Systick interrupt time
*/
HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000);
/**Configure the Systick
*/
HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);
/* SysTick_IRQn interrupt configuration */
HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @param file: The file name as string.
* @param line: The line in file as a number.
* @retval None
*/
void _Error_Handler(char *file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/**
* @}
*/
/**
* @}
*/
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
