1. 将两个点云拼接成一个点云
1.1 输入和输出
输入:两个相同点格式的点云比如pcl::PointCloud<pcl::PointXYZ> cloud_a, cloud_b;
输入:与输入点云相同格式的点云pcl::PointCloud<pcl::PointXYZ> cloud_c;
cloud_c = cloud_a;
cloud_c += cloud_b;
1.2 效果
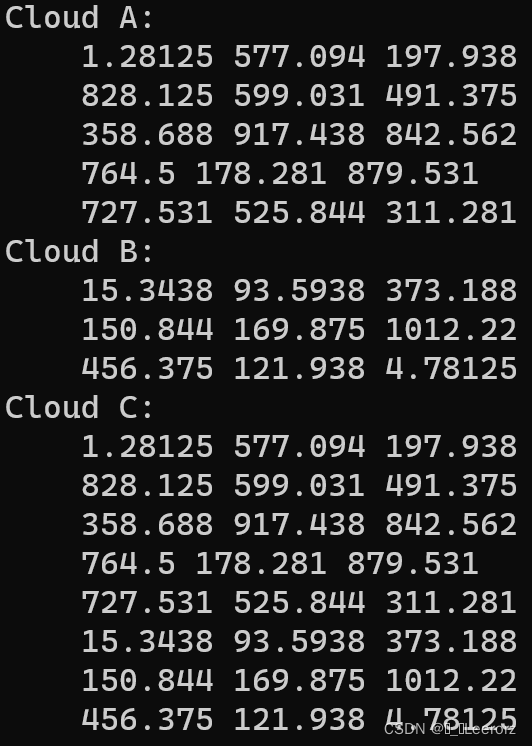
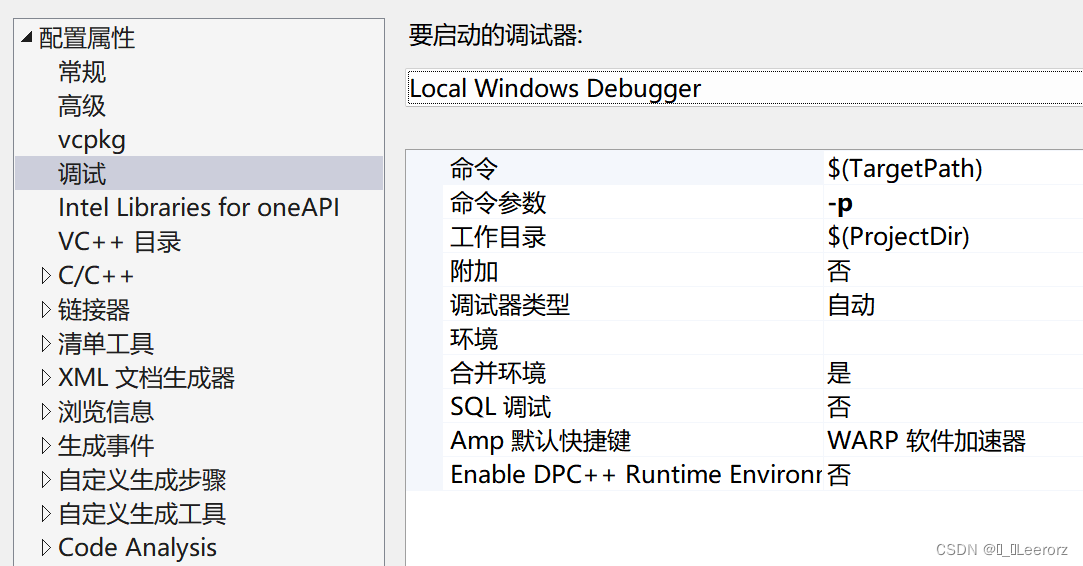
调试时需要在属性->调试->命令参数 一栏中填入 -p
2. 将点,法向量组合成一个点云
2.1 输入和输出
输入:普通xyz点云,法向量和表面曲率估计的点云,带有点、法向量和表面曲率估计的空
pcl::PointCloud<pcl::PointXYZ> cloud_a, cloud_b, cloud_c; // 一种用(x,y,z)代表点的点云
pcl::PointCloud<