STM32F407输入捕获应用--PWM 输入模式测量脉冲频率与宽度
输入捕获一般应用在两个方面,一个方面是脉冲跳变沿时间测量,另一方面
是 PWM 输入测量。
一、测量脉宽或者频率
1.测量频率
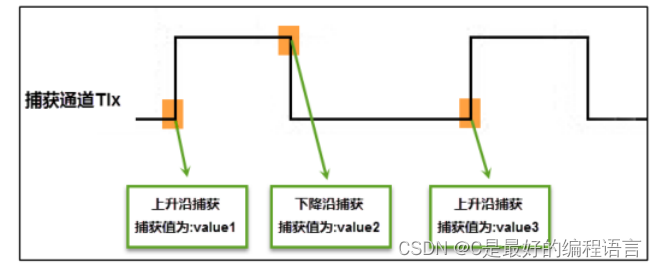
当捕获通道 TIx 上出现上升沿时,发生第一次捕获,计数器 CNT 的值会被锁存到捕获寄存器 CCR 中,而且还会进入捕获中断,在中断服务程序中记录一次捕获(可以用一个标志变量来记录),并把捕获寄存器中的值读取到 value1 中。当出现第二次上升沿时,发生第二次捕获,计数器 CNT 的值会再次被锁存到捕获寄存器 CCR 中,并再次进入捕获中断,在捕获中断中,把捕获寄存器的值读取到 value3 中,并清除捕获记录标志。利用 value3 和 value1 的差值我们就可以算出信号的周期(频率)。
2.测量脉宽
当捕获通道 TIx 上出现上升沿时,发生第一次捕获,计数器 CNT 的值会被锁存到捕获寄存器 CCR 中,而且还会进入捕获中断,在中断服务程序中记录一次捕获(可以用一个标志变量来记录),并把捕获寄存器中的值读取到 value1 中。然后把捕获边沿改变为下降沿捕获,目的是捕获后面的下降沿。当下降沿到来的时候,发生第二次捕获,计数器 CNT 的值会再次被锁存到捕获寄存器 CCR 中,并再次进入捕获中断,在捕获中断中,把捕获寄存器的值读取到 value3 中,并清除捕获记录标志。然后把捕获边沿设置为上升沿捕获。在测量脉宽过程中需要来回的切换捕获边沿的极性,如果测量的脉宽时间比较长,定时器就会发生溢出,溢出的时候会产生更新中断,我们可以在中断里面对溢出进行记录处理。
二、PWM 输入模式
测量脉宽和频率还有一个更简便的方法就是使用 PWM 输入模式。与上面那种只使用一个捕获寄存器测量脉宽和频率的方法相比,PWM 输入模式需要占用两个捕获寄存器。
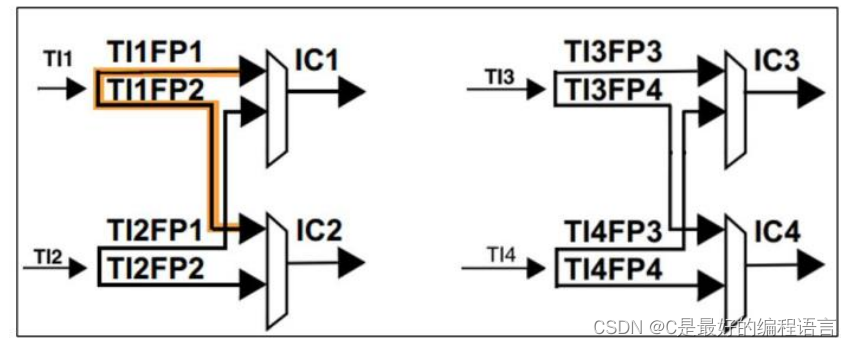
当使用 PWM 输入模式的时候,因为一个输入通道(TIx)会占用两个捕获通道(ICx),所以一个定时器在使用 PWM 输入的时候最多只能使用两个输入通道(TIx)。我们以输入通道 TI1 工作在 PWM 输入模式为例来讲解下具体的工作原理,其他通道以此类推即可。
PWM 信号由输入通道 TI1 进入,因为是 PWM 输入模式的缘故,信号会被分为两路,一路是 TI1FP1,另外一路是 TI2FP2。其中一路是周期,另一路是占空比,具体哪一路信号对应周期还是占空比,得从程序上设置哪一路信号作为触发输入,作为触发输入的哪一路信号对应的就是周期,另一路就是对应占空比。作为触发输入的那一路信号还需要设置极性,是上升沿还是下降沿捕获,一旦设置好触发输入的极性,另外一路硬件就会自动配置为相反的极性捕获,无需软件配置。一句话概括就是:选定输入通道,确定触发信号,然后设置触发信号的极性即可,因为是 PWM 输入的缘故,另一路信号则由硬件配置,无需软件配置。当使用 PWM 输入模式的时候必须将从模式控制器配置为复位模式(配置寄存器 SMCR 的位 SMS[2:0]来实现),即当我们启动触发信号开始进行捕获的时候,同时把计数器 CNT 复位清零。
下面我们以一个更加具体的时序图来分析下 PWM 输入模式。
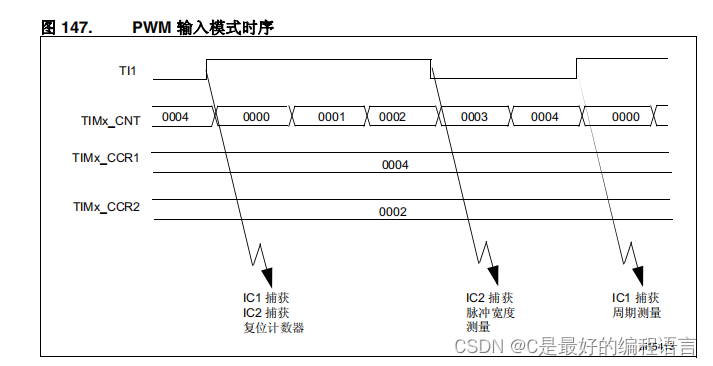
PWM 信号由输入通道 TI1 进入,配置 TI1FP1 为触发信号,上升沿捕获。当上升沿的时候 IC1 和 IC2 同时捕获,计数器 CNT 清零,到了下降沿的时候,IC2捕获,此时计数器 CNT 的值被锁存到捕获寄存器 CCR2 中,到了下一个上升沿的时候,IC1 捕获,计数器 CNT 的值被锁存到捕获寄存器 CCR1 中。其中 CCR2 测量的是脉宽,CCR1 测量的是周期。
从软件上来说,用 PWM 输入模式测量脉宽和周期更容易,付出的代价是需要占用两个捕获寄存器
三、软件实现
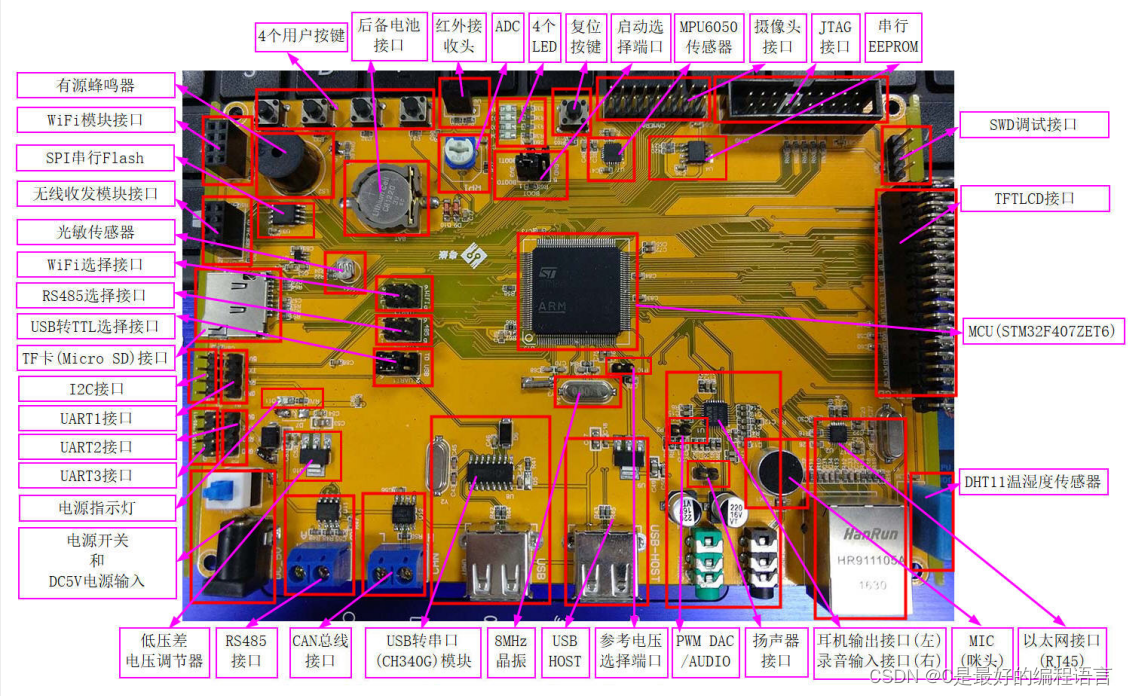
3.1、硬件准备
1、粤嵌开发板一套
2、迷你示波器一个
3.2代码
初始化代码
/*****************************************
引脚说明:
PB6
TIM4_CH1(TIM4 -- APB1 16位 84MHZ)
*****************************************/
void Pwm_PB6_InputInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_ICInitTypeDef TIM4_ICInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE);//使能GPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //GPIOB6
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL; //下拉
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化
// 定时器复用引脚
GPIO_PinAFConfig(GPIOB,GPIO_PinSource6,GPIO_AF_TIM4);
TIM_TimeBaseStructure.TIM_Prescaler = 83; //定时器分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
TIM_TimeBaseStructure.TIM_Period = 49999; //自动重装载值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //分频因子 配置死区时会用到
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseStructure);
//初始化TIM2输入捕获参数
TIM4_ICInitStructure.TIM_Channel = TIM_Channel_1; //通道1
TIM4_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕获
TIM4_ICInitStructure.TIM_ICSelection= TIM_ICSelection_DirectTI; //映射到TI1上
TIM4_ICInitStructure.TIM_ICPrescaler= TIM_ICPSC_DIV1; //配置输入分频,不分频
TIM4_ICInitStructure.TIM_ICFilter = 0x05; //IC3F=0000 配置输入滤波器 不滤波
// 初始化 PWM 输入模式
TIM_PWMIConfig(TIM4, &TIM4_ICInitStructure);
// 当工作做 PWM 输入模式时,只需要设置触发信号的那一路即可(用于测量周期)
// 另外一路(用于测量占空比)会由硬件自带设置,不需要再配置
// 选择输入捕获的触发信号
TIM_SelectInputTrigger(TIM4, TIM_TS_TI1FP1);
// 选择从模式: 复位模式
// PWM 输入模式时,从模式必须工作在复位模式,当捕获开始时,计数器 CNT 会被复位
TIM_SelectSlaveMode(TIM4, TIM_SlaveMode_Reset);
TIM_SelectMasterSlaveMode(TIM4,TIM_MasterSlaveMode_Enable);
// 使能捕获中断,这个中断针对的是主捕获通道(测量周期那个)
TIM_ITConfig(TIM4, TIM_IT_CC1, ENABLE);
TIM_ClearITPendingBit(TIM4, TIM_IT_CC1);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=2;//抢占优先级2
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0; //子优先级0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器、
//TIM_ITConfig(TIM4,TIM_IT_Update|TIM_IT_CC2,ENABLE); //允许更新中断 ,允许CC2IE捕获中断
TIM_Cmd(TIM4,ENABLE ); //使能定时器4
}
主函数代码
u32 IC1Value, IC2Value;
float DutyCycle,Frequency;
//定时器4中断服务程序
void TIM4_IRQHandler(void)
{
/* 清除定时器捕获/比较 1 中断 */
TIM_ClearITPendingBit(TIM4, TIM_IT_CC1);
/* 获取输入捕获值 */
IC1Value = TIM_GetCapture1(TIM4);
IC2Value = TIM_GetCapture2(TIM4);
//printf("IC1Value = %d IC2Value = %d ",IC1Value,IC2Value);
// 注意:捕获寄存器 CCR1 和 CCR2 的值在计算占空比和频率的时候必须加 1
if (IC1Value != 0)
{
flag = 1;
}
}
int main(void)
{
unsigned int count = 0;
//设置NVIC分组 第二分组 抢占优先级范围:0~3 响应优先级范围:0~3
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
Delay_Init();
//对LED初始化
Led_Init();
Usart1_Init(115200);
Pwm_PB6_InputInit();
while(1)
{
//每隔500ms计算一次占空比与频率。
if(flag == 1)
{
/* 占空比计算 */
DutyCycle = (float)((IC2Value+1) * 100) / (IC1Value+1);
/* 频率计算 */
Frequency = 84000000/(83+1)/(float)(IC1Value+1);
printf("占空比:%0.2f%% 频率:%0.2fHz\r\n",DutyCycle,Frequency);
DutyCycle = 0;
Frequency = 0;
flag = 0;
}
delay_ms(500);
}
return 0;
}
3.4 验证
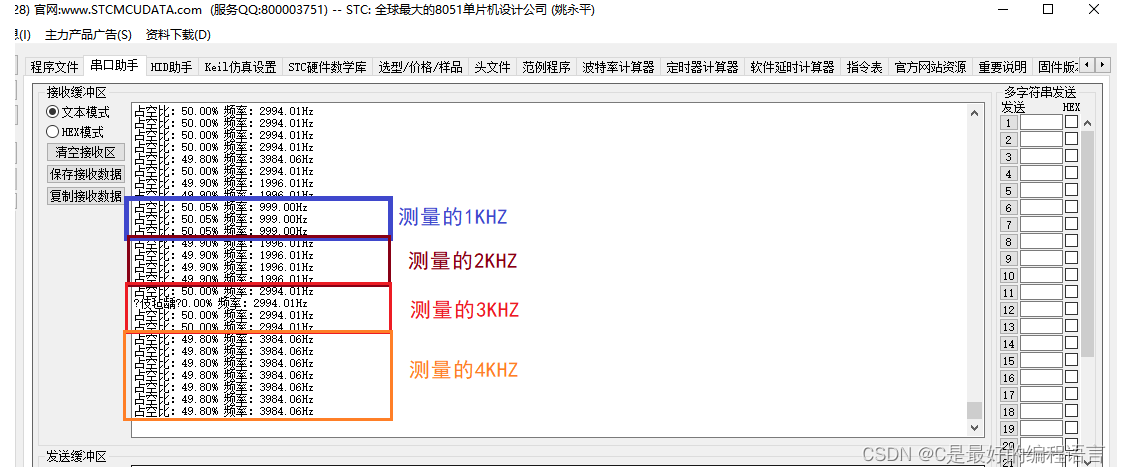
最后发现有一定的误差,未知是不是这几百块的示波器产生的问题,还是软件的问题。还待验证,到时再找台高精度的脉冲发生器看看了。有了解的码农可以互相讨论下。
程序链接:https://download.csdn.net/download/wwwqqq2014/87148727