前面耽搁了几天,今天终于把CH347 SPI接口调试好了。
CH347动态库中SPI接口函数如下:
typedef struct _SPI_CONFIG{
UCHAR iMode; // 0-3:SPI Mode0/1/2/3
UCHAR iClock; // 0=60MHz, 1=30MHz, 2=15MHz, 3=7.5MHz, 4=3.75MHz, 5=1.875MHz, 6=937.5KHz,7=468.75KHz
UCHAR iByteOrder; // 0=LSB first(LSB), 1=MSB first(MSB)
USHORT iSpiWriteReadInterval; // The SPI interface routinely reads and writes data command, the unit is uS
UCHAR iSpiOutDefaultData; // SPI prints data by default when it reads data
ULONG iChipSelect; // Piece of selected control, if bit 7 is 0, slice selection control is ignored, if bit 7 is 1, the parameter is valid: bit 1 bit 0 is 00/01 and CS1/CS2 pins are selected as low level active chip options respectively
UCHAR CS1Polarity; // Bit 0: CS1 polarity control: 0: effective low level; 1: effective lhigh level;
UCHAR CS2Polarity; // Bit 0: CS2 polarity control: 0: effective low level; 1: effective lhigh level;
USHORT iIsAutoDeativeCS; // Whether to undo slice selection automatically after the operation is complete
USHORT iActiveDelay; // Set the latency for read/write operations after slice selection,the unit is us
ULONG iDelayDeactive; // Delay time for read and write operations after slice selection is unselected,the unit is us
}mSpiCfgS,*mPSpiCfgS;
/***************SPI********************/
// SPI Controller Initialization
BOOL WINAPI CH347SPI_Init(ULONG iIndex,mSpiCfgS *SpiCfg);
// Get SPI controller configuration information
BOOL WINAPI CH347SPI_GetCfg(ULONG iIndex,mSpiCfgS *SpiCfg);
// Before setting the chip selection status, call CH347SPI_Init to set CS
BOOL WINAPI CH347SPI_ChangeCS(ULONG iIndex, // Specify device number
UCHAR iStatus); // 0=Cancel the piece to choose,1=Set piece selected
// Set SPI slice selection
BOOL WINAPI CH347SPI_SetChipSelect(ULONG iIndex, // Specify device number
USHORT iEnableSelect, // The lower octet is CS1 and the higher octet is CS2. A byte value of 1= sets CS, 0= ignores this CS setting
USHORT iChipSelect, // The lower octet is CS1 and the higher octet is CS2. A byte value of 1= sets CS, 0= ignores this CS setting
ULONG iIsAutoDeativeCS, // The lower 16 bits are CS1 and the higher 16 bits are CS2. Whether to undo slice selection automatically after the operation is complete
ULONG iActiveDelay, // The lower 16 bits are CS1 and the higher 16 bits are CS2. Set the latency of read/write operations after chip selection, the unit is us
ULONG iDelayDeactive); // The lower 16 bits are CS1 and the higher 16 bits are CS2. Delay time for read and write operations after slice selection the unit is us
//SPI4 write data
BOOL WINAPI CH347SPI_Write(ULONG iIndex, // Specify device number
ULONG iChipSelect, // Slice selection control, when bit 7 is 0, slice selection control is ignored, and when bit 7 is 1, slice selection operation is performed
ULONG iLength, // Number of bytes of data to be transferred
ULONG iWriteStep, // The length of a single block to be read
PVOID ioBuffer); // Point to a buffer to place the data to be written out from MOSI
//SPI4 read data. No need to write data first, the efficiency is higher than that of the CH347SPI_WriteRead
BOOL WINAPI CH347SPI_Read(ULONG iIndex, // Specify device number
ULONG iChipSelect, // Slice selection control, when bit 7 is 0, slice selection control is ignored, and when bit 7 is 1, slice selection operation is performed
ULONG oLength, // Number of bytes to send
PULONG iLength, // Number of bytes of data to be read in
PVOID ioBuffer); // Points to a buffer that place the data to be written out from DOUT, return the data read in from DIN
// Handle SPI data stream 4-wire interface
BOOL WINAPI CH347SPI_WriteRead(ULONG iIndex, // Specify the device number
ULONG iChipSelect, // Selection control, if the film selection control bit 7 is 0, ignore the film selection control bit 7 is 1 and operate the film selection
ULONG iLength, // Number of bytes of data to be transferred
PVOID ioBuffer ); // Points to a buffer that place the data to be written out from DOUT, return the data read in from DIN
//place the data to be written from MOSI, return the data read in from MISO
BOOL WINAPI CH347StreamSPI4(ULONG iIndex, // Specify the device number
ULONG iChipSelect, // Film selection control, if bit 7 is 0, slice selection control is ignored.If bit 7 is 1, the parameter is valid:Bit 1 bit 0 is 00/01/10. Select D0/D1/D2 pins as low level active chip options respectively
ULONG iLength, // Number of bytes of data to be transferred
PVOID ioBuffer ); // Points to a buffer, places data to be written out from DOUT, and returns data to be read in from DIN
要实现SPI通信,至少要用到CH347SPI_Init(ULONG iIndex,mSpiCfgS *SpiCfg) CH347SPI_Write(ULONG iIndex, ULONG iChipSelect, ULONG iLength, ULONG iWriteStep, PVOID ioBuffer) CH347SPI_Read(ULONG iIndex, ULONG iChipSelect, ULONG oLength, PULONG iLength, PVOID ioBuffer)这3个函数。
对这3个函数进行封装:
class SPIConfig(ctypes.Structure):
_fields_ = [
("iMode", ctypes.c_ubyte), # 0-3: SPI Mode0/1/2/3
("iClock", ctypes.c_ubyte), # 0=60MHz, 1=30MHz, 2=15MHz, 3=7.5MHz,
("iByteOrder", ctypes.c_ubyte), # 4=3.75MHz, 5=1.875MHz, 6=937.5KHz, 7=468.75KHz
("iSpiWriteReadInterval", ctypes.c_ushort), # Regular interval for SPI read/write commands, in microseconds
("iSpiOutDefaultData", ctypes.c_ubyte), # Default output data when reading from SPI
("iChipSelect", ctypes.c_ulong), # Chip select control. Bit 7 as 0 ignores chip select control,
# Bit 7 as 1 makes the parameters valid:
# Bit 1 and Bit 0 as 00/01 selects CS1/CS2 pin as the active low chip select.
("CS1Polarity", ctypes.c_ubyte), # Bit 0: CS1 polarity control, 0: active low, 1: active high
("CS2Polarity", ctypes.c_ubyte), # Bit 0: CS2 polarity control, 0: active low, 1: active high
("iIsAutoDeativeCS", ctypes.c_ushort), # Automatically de-assert chip select after the operation is completed
("iActiveDelay", ctypes.c_ushort), # Delay time for executing read/write operations after chip select is set, in microseconds
("iDelayDeactive", ctypes.c_ulong) # Delay time for executing read/write operations after chip select is de-asserted, in microseconds
]
def spi_init(self, device_index: int, spi_config: SPIConfig) -> bool:
"""
Initialize the SPI Controller.
Args:
device_index (int): The device number.
spi_config (SPIConfig): The configuration for the SPI controller.
Returns:
bool: True if initialization is successful, False otherwise.
"""
result = self.ch347dll.CH347SPI_Init(device_index, ctypes.byref(spi_config))
return result
def spi_write(self, device_index: int, chip_select: int, write_data: bytes, write_step: int = 512) -> bool:
"""
SPI write data.
Args:
device_index (int): Device number.
chip_select (int): Chip selection control. When bit 7 is 0, chip selection control is ignored.
When bit 7 is 1, chip selection operation is performed.
write_data (bytes): Data to write.
write_step (int, optional): The length of a single block to be read. Default is 512.
Returns:
bool: True if successful, False otherwise.
"""
write_length = len(write_data)
write_buffer = ctypes.create_string_buffer(write_data)
result = self.ch347dll.CH347SPI_Write(device_index, chip_select, write_length, write_step, write_buffer)
return result
def spi_read(self, device_index: int, chip_select: int, write_data: bytes, read_length: int) -> bytes:
"""
SPI read data.
Args:
device_index (int): Device number.
chip_select (int): Chip selection control. When bit 7 is 0, chip selection control is ignored.
When bit 7 is 1, chip selection operation is performed.
write_data (bytes): Data to write.
read_length (int): Number of bytes to read.
Returns:
bytes: Data read in from the SPI stream if successful, None otherwise.
"""
write_length = len(write_data)
# Create ctypes buffer for write data
write_buffer = ctypes.create_string_buffer(write_data)
# Create ctypes buffer for read data
read_buffer = ctypes.create_string_buffer(read_length)
# Create combined buffer for read and write data
combined_buffer = ctypes.create_string_buffer(write_buffer.raw[:write_length] + read_buffer.raw)
result = self.ch347dll.CH347SPI_Read(device_index, chip_select, write_length, ctypes.byref(ctypes.c_ulong(read_length)), combined_buffer)
if result:
# Extract the read data from the combined buffer
read_data = combined_buffer[:read_length]
return bytes(read_data)
else:
return None
连接CH347和SPI Flash模块:
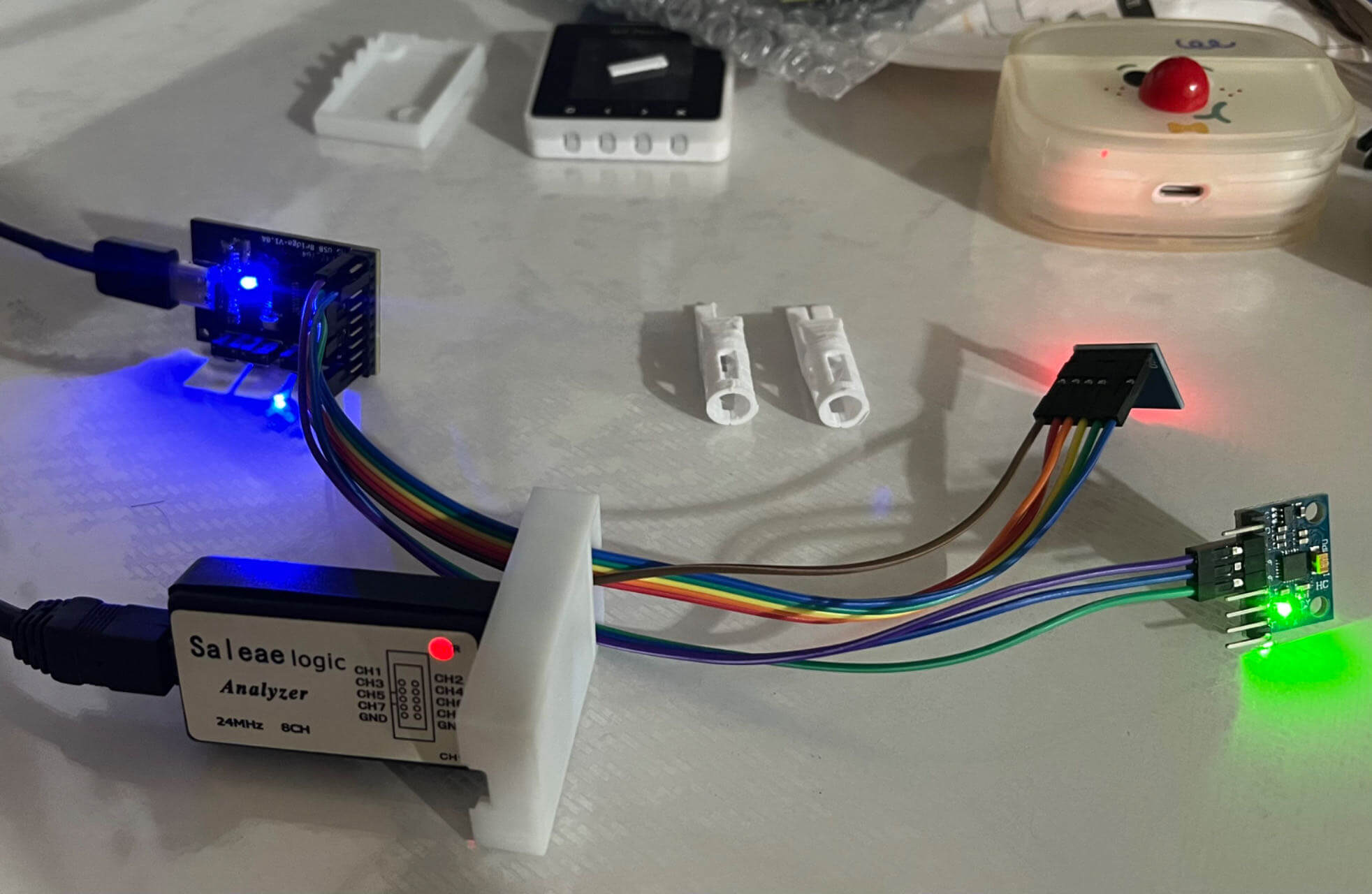
上图中,红色LED的是W25Q32FV SPI Flash模块,绿色LED的是MPU6050。
编写测试代码:
import ch347
dll_path = "ch347dlla64.dll" # Replace with the actual path to the DLL
device_index = 0 # Set the device index according to your requirements
ch347_driver = ch347.CH347Driver(dll_path)
result = ch347_driver.open_device(device_index)
if result:
print(f"Successfully opened device index: {device_index}")
else:
print(f"Failed to close device index: {device_index}")
spi_config = ch347.SPIConfig(
iMode = 0,
iClock = 0,
iByteOrder = 1,
iSpiWriteReadInterval = 0,
iSpiOutDefaultData = 0,
iChipSelect = 0x80,
CS1Polarity = 0,
CS2Polarity = 0,
iIsAutoDeative = 1,
iActiveDelay = 0,
iDelayDeactive = 0
)
result = ch347_driver.spi_init(device_index, spi_config)
if result:
print("Success to init SPI.")
else:
print("Failed to init SPI.")
# 读制造商数据
read_data = ch347_driver.spi_read(device_index, 0x80, b"\x90\x00\x00\x00", 2)
print(read_data)
# 读 0x000000 4个字节
read_data = ch347_driver.spi_read(device_index, 0x80, b"\x03\x00\x00\x00", 4)
print(read_data)
# 写 0x000000 2个字节 0x01 0x02
ch347_driver.spi_write(device_index, 0x80, b'\x06')
ch347_driver.spi_write(device_index, 0x80, b'\x02\x00\x00\x00\x01\x02')
# 读 0x000000 4个字节
read_data = ch347_driver.spi_read(device_index, 0x80, b"\x03\x00\x00\x00", 4)
print(read_data)
# Example usage of CH347CloseDevice
result = ch347_driver.close_device(device_index)
if result:
print(f"Successfully closed device index: {device_index}")
else:
print(f"Failed to close device index: {device_index}")
运行一下:
❯ python testSPI.py
Successfully opened device index: 0
Success to init SPI.
b'\xef\x15'
b'\xff\xff\xff\xff'
b'\x01\x02\xff\xff'
Successfully closed device index: 0
至此就可以读写SPI Flash了。
公众号 | FunIO
微信搜一搜 “funio”,发现更多精彩内容。
个人博客 | blog.boringhex.top