概述
熟悉单片机或者裸机辑编程的读者我想应该对gpio不陌生吧,对于裸机而言,我们只要配置对应的gpio寄存器,就可以驱动gpio完成输入、输出以及一些时序模拟的操作。
众所周知,linux是一个庞大而完善的系统,尤其是驱动框架,其中就包含gpio和pinctrl 子系统专门用于操作gpio。
注意
1、裸机开发,完成gpio的操作需要两步。
a. 设置gpio复用功能以及电气属性(包括上下拉、驱动能力、时钟等)。
b. 设置gpio方向,设置gpio输出数据、以及gpio输入数据读取。
2、类比裸机开发,linux完成gpio操作同样需要两步。
a. 调用pinctrl子系统完成gpio复用功能和电气属性的设置。
b. 调用gpio子系统完成gpio的相应操作。
接口
pinctrl子系统,硬件信息定义在设备树中 &iomuxc -> imx6ul-evk节点下。
/* pinctrl分析,设备树中 &iomuxc -> imx6ul-evk节点下 */
pinctrl_feng_gpioled: fledgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0X10B0 /* GPIO01_IO03 LED */
>;
};
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03信息定义在文件imx6ul-pinfunc.h中。
/* imx6ul-pinfunc.h文件中定义 mux_reg conf_reg input_reg mux_mode input_val*/
#define MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x0068 0x02F4 0x0000 0x5 0x0
主要包含五部分内容:
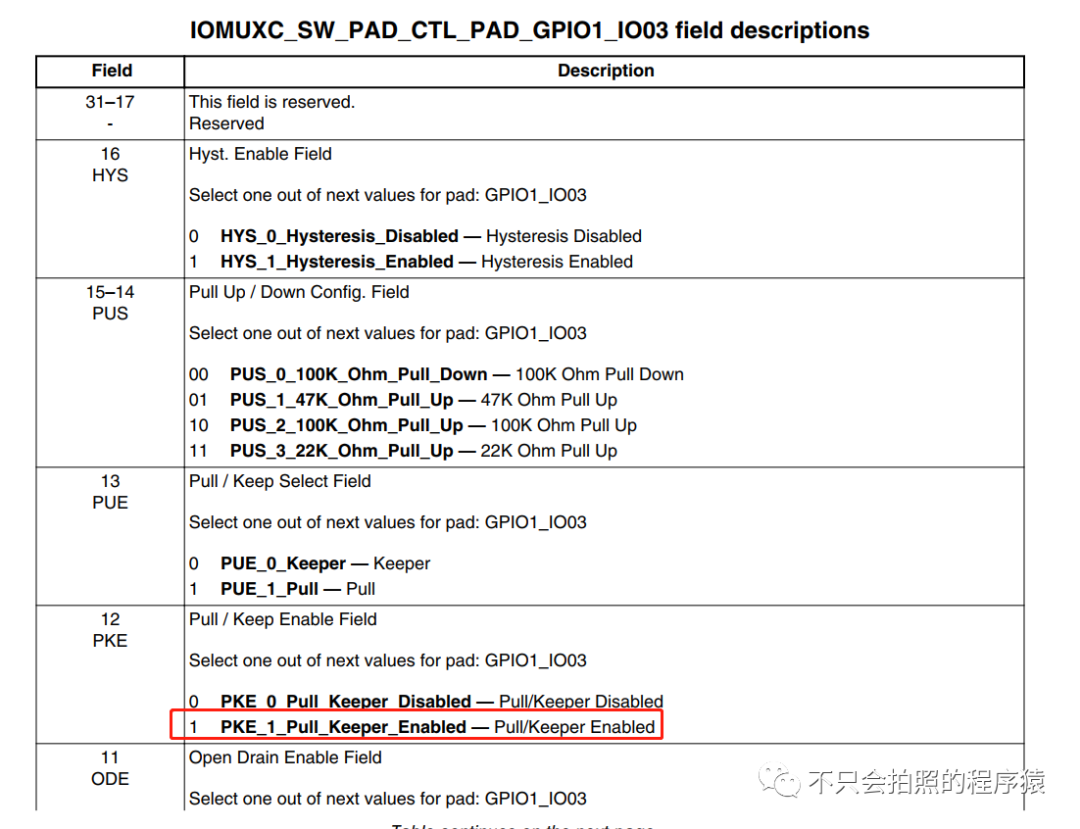
①mux_reg,表示mux寄存器地址,注意这里的地址是偏移地址,起始地址定义在IOMUXC中。

②conf_reg,表示pad寄存器地址,这里的地址同样是偏移地址。

③input_reg,表示输入寄存器地址,没有此寄存器无效。
④mux_mode,表示mux寄存器的值,这里的5表示复用为GPIO1_IO3。

⑤input_val,表示输入寄存器的值,这里无效。
0X10B0则是pad寄存器的值。

gpio子系统,硬件信息可以定义在设备树中根节点下。
/**
* @&gpio1:表示feng_led_gpio引脚使用的IO属于GPIO1组。
* @3:表示 GPIO1 组的第3号IO。
* @GPIO_ACTIVE_LOW:表示低电平有效。高电平有效写作GPIO_ACTIVE_HIGH。
**/
feng_alpha_gpioled {
...
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_feng_gpioled>;
feng_led_gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;
...
};
&gpio1:表示feng_led_gpio引脚使用的IO属于GPIO1组。
3:表示 GPIO1 组的第3号IO。
通过&gpio1和3这两个值驱动程序就知道feng_led_gpio引脚使用了 GPIO1_IO3.
GPIO_ACTIVE_LOW:表示低电平有效。高电平有效写作GPIO_ACTIVE_HIGH。
gpio资源申请与释放。
/**
* gpio资源申请,位置:linux/gpio.h
* @gpio:gpio信息 label:gpio名字
* @申请成功返回0,失败返回-1
**/
static inline int gpio_request(unsigned gpio, const char *label);
/**
* gpio资源释放,位置:linux/gpio.h
* @gpio:gpio信息
**/
static inline void gpio_free(unsigned gpio);
gpio方向设置。
/**
* 设置gpio为输入,位置:linux/gpio.h
* @gpio:gpio信息
* @成功返回0,失败返回-1
**/
static inline int gpio_direction_input(unsigned gpio);
/**
* 设置gpio输出,且输出指定值,位置:linux/gpio.h
* @gpio:gpio信息 value:输出值
* @成功返回0,失败返回-1
**/
static inline int gpio_direction_output(unsigned gpio, int value);
读取gpio输入和设置gpio输出。
/**
* 获取gpio的值,仅输入有效,位置:linux/gpio.h
* @gpio:gpio信息
* @获取到的值
**/
static inline int gpio_get_value(unsigned gpio);
/**
* 设置gpio输出值,仅输出有效,位置:linux/gpio.h
* @gpio:gpio信息 value:输出值
**/
static inline void gpio_set_value(unsigned gpio, int value);
gpio值与中断向量值相互转换。
/**
* 通过gpio的值得到中断向量值,位置:linux/gpio.h
* @gpio:gpio信息
* @中断向量值
**/
static inline int gpio_to_irq(unsigned gpio);
/**
* 通过中断向量值获取gpio的值,位置:linux/gpio.h
* @irq:中断向量值
* @gpio值
**/
static inline int irq_to_gpio(unsigned int irq);
示例
★示例采用正点原子的阿尔法开发板进行验证,关于硬件信息在之前的文章《浅谈linux - 地址映射ioremap》已经详细介绍过,不清楚的读者可以前往查看。
★包含驱动头文件led_pf_gpio_dts_chrdrv.h和源文件led_pf_gpio_dts_chrdrv.c、设备树源文件atomic.dts(只截取了测试部分的设备树内容)、应用程序main.c以及编译规则文件Makefile(均已验证通过)。
 led_pf_gpio_dts_chrdrv.h
led_pf_gpio_dts_chrdrv.h
/**
* @Filename : led_pf_gpio_dts_chrdrv.h
* @Revision : $Revision: 1.00 $
* @Author : Feng(更多编程相关的知识和源码见微信公众号:不只会拍照的程序猿,欢迎订阅)
* @Description : GPIO操作示例
**/
#ifndef __LED_PF_GPIO_DTS_CHRDRV_H__
#define __LED_PF_GPIO_DTS_CHRDRV_H__
#include <linux/init.h>
#include <linux/module.h>
#include <linux/platform_device.h>
#include <linux/fs.h>
#include <linux/miscdevice.h>
#include <linux/uaccess.h>
#include <linux/io.h> //ioremap/iounmap
#include "chrdev.h"
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#define LED_ON 0x100001
#define LED_OFF 0x100002
/* 驱动类定义 */
struct class_led {
struct class_chrdev *chrdev; /* 字符设备对象 */
struct device_node *np; /* 设备树中的节点 */
unsigned int pin; /* 引脚信息 */
int gpio; /* 保存gpio编号 */
};
#endif
 led_pf_gpio_dts_chrdrv.c
led_pf_gpio_dts_chrdrv.c
/**
* @Filename : led_pf_gpio_dts_chrdrv.c
* @Revision : $Revision: 1.00 $
* @Author : Feng(更多编程相关的知识和源码见微信公众号:不只会拍照的程序猿,欢迎订阅)
* @Description : GPIO操作示例
**/
#include "led_pf_gpio_dts_chrdrv.h"
struct class_led fengled;
/**
* @LED控制
* @cmd: LED_ON打开LED,else关闭LED
*/
static long led_ioctl(struct file *file, unsigned int cmd, unsigned long buf);
static struct file_operations led_fops = {
.unlocked_ioctl = led_ioctl
};
/**
* @platform总线驱动和设备匹配后回调函数
* @pdev: 指向platform_dev对象
*/
static int pf_led_probe(struct platform_device *pdev);
/**
* @移除platform总线驱动或设备后的回调函数
* @pdev: 指向platform_dev对象
*/
static int pf_led_remove(struct platform_device *pdev);
/* 匹配列表,用于设备树中的compatible属性进行匹配 */
static const struct of_device_id pf_led_of_match[] = {
{.compatible = "feng,alpha_pf_led"},
{/* Sentinel */}
};
/* LED驱动定义 */
struct platform_driver led_drv = {
.driver = {
.owner = THIS_MODULE,
.name = "feng_led",
.of_match_table = pf_led_of_match,
},
.probe = pf_led_probe, /* 匹配后的回调函数 */
.remove = pf_led_remove /* dev或drv移除后的回调函数 */
};
/**
* @打开LED
* @gpio: gpio信息
*/
static void _led_on(const int gpio)
{
gpio_set_value(gpio, 0);
printk("led on...\n");
}
/**
* @关闭LED
* @gpio: gpio信息
*/
static void _led_off(const int gpio)
{
gpio_set_value(gpio, 1);
printk("led off...\n");
}
/**
* @初始化LED相关寄存器
* @gpio: gpio信息
*/
static int _led_init(const int p_gpio)
{
if (gpio_request(p_gpio, "f_led_gpio") < 0) {
printk("gpio_request error...\n");
return -1;
} else {
printk("gpio_request ok...\n");
}
if (gpio_direction_output(p_gpio, 1) < 0) {
printk("gpio_direction_output error...\n");
return -1;
} else {
printk("gpio_direction_output ok...\n");
}
return 0;
}
/**
* 获取设备信息,成功返回0,失败返回-1
* @pdev: 总线匹配调用probe传入的设备信息参数
* @dev: 用于保存设备信息
* @注意: 设备名,总线框架中,匹配之后调用probe函数,传入设备对象里面的pdev->dev.of_node
* @记录的是设备树节点信息,因此,可以直接读取设备信息,而不用再调用函数of_find_node_by_path查找节点
* @成功返回0,失败返回-1
*/
static int _led_dts_info_get(struct platform_device *pdev, struct class_led *dev)
{
/* 获取并保存设备节点 */
if ((dev->np = pdev->dev.of_node) == NULL) {
printk("node[compatible : %s] not found...\n", pf_led_of_match[0].compatible);
return -1;
}
/* 获取gpio属性信息 */
if ((dev->gpio = of_get_named_gpio(dev->np, "feng_led_gpio", 0)) < 0) {
printk("feng_led_gpio not found...\n");
return -1;
}
return 0;
}
/**
* @LED控制
* @cmd: LED_ON打开LED,else关闭LED
*/
static long led_ioctl(struct file *file, unsigned int cmd, unsigned long buf)
{
if (cmd == LED_ON)
_led_on(fengled.gpio);
else
_led_off(fengled.gpio);
return 0;
}
/**
* @platform总线驱动和设备匹配后回调函数,用于完成设备初始化、资源申请、创建字符设备等操作
* @pdev: 指向platform_dev对象
*/
static int pf_led_probe(struct platform_device *dev)
{
/* 1. 获取设备树资源信息 */
if (_led_dts_info_get(dev, &fengled) == -1)
return -1;
/* 2. 硬件初始化 */
if (_led_init(fengled.gpio) == -1)
return -1;
/* 3. 注册设备 */
if ((fengled.chrdev = chrdev_create("cls_gpioled", "chr_gpioled", "feng_gpioled", &led_fops)) == NULL) {
printk("create char device error...\n");
return -1;
}
return 0;
}
/**
* @移除platform总线驱动或设备后的回调函数,用于完成资源释放、设备销毁等操作
* @pdev: 指向platform_dev对象
*/
/* */
static int pf_led_remove(struct platform_device *dev)
{
gpio_free(fengled.gpio); /* 释放gpio资源 */
chrdev_destroy(fengled.chrdev); /* 注销字符设备 */
return 0;
}
/**
* @模块入口函数
*/
static int __init led_drv_init(void)
{
return platform_driver_register(&led_drv);
}
/**
* @模块出口函数
*/
static void __exit led_drv_exit(void)
{
platform_driver_unregister(&led_drv);
printk("platform drv remove...\n");
}
module_init(led_drv_init);
module_exit(led_drv_exit);
MODULE_LICENSE("GPL");
/* 调用modinfo xx(模块名)查看 */
MODULE_AUTHOR("feng"); /* 模块的作者 */
MODULE_VERSION ("1.00"); /* 模块版本号 */
/* MODULE_DESCRIPTION("xxxxx"); 模块描述 */
/* MODULE_ALIAS("xxx"); 模块别名 */
 main.c
main.c
/**
* @Filename : main.c
* @Revision : $Revision: 1.00 $
* @Author : Feng(更多编程相关的知识和源码见微信公众号:不只会拍照的程序猿,欢迎订阅)
* @Description : led设备应用示例
**/
/*调试宏*/
#define DEBUG
#ifdef DEBUG
#define pr_debug(fmt, ...) printf(fmt, ##__VA_ARGS__)
#else
#define pr_debug(fmt, ...)
#endif
/*头文件*/
#include <stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <sys/ioctl.h>
#include <fcntl.h>
#include <string.h>
#define LED_ON 0x100001
#define LED_OFF 0x100002
#define LED_DEV_FILE "/dev/feng_gpioled"
/**
* @主函数
* @用户输入/home/app/main on 1 打开LED
**/
int main(int argc, char *argv[])
{
int fd;
int num = 1;
if (argc != 3) {
pr_debug("Usage: %s <on|off> <1|2|3|4>\n", argv[0]);
return -1;
}
if ((fd = open(LED_DEV_FILE, O_RDWR)) < 0) {
pr_debug("file open failed...\n");
return -1;
}
num = strtoul(argv[2], NULL, 0);
if (!strcmp(argv[1], "on"))
ioctl(fd, LED_ON, &num);
else if (!strcmp(argv[1], "off"))
ioctl(fd, LED_OFF, &num);
else
pr_debug("input commend wrong...\n");
close(fd);
return 0;
}
 atomic.dts
atomic.dts
feng_alpha_gpioled {
compatible = "feng,alpha_pf_led";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_feng_gpioled>;
feng_led_gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;
pin = <3>;
};
pinctrl_feng_gpioled: fledgrp {
fsl,pins = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0X10B0 /* GPIO01_IO03 LED */
>;
};
 Makefile
Makefile
#根文件所在目录
ROOTFS_DIR = /home/feng/atomic/rootfs
#交叉编译工具链
CROSS_COMPILE = arm-linux-gnueabihf-
CC = $(CROSS_COMPILE)gcc
#目标文件名
TAR_NAME = led_pf_gpio_dts
#应用程序名字
APP_NAME = led
#驱动目录路径
DRV_DIR = $(ROOTFS_DIR)/home/drv
DRV_DIR_LIB = $(ROOTFS_DIR)/lib/modules/4.1.15
#动态库目录路径
LIB_DIR = $(ROOTFS_DIR)/home/lib
#应用程序目录路径
APP_DIR = $(ROOTFS_DIR)/home/app
#KERNELRELEASE由内核makefile赋值
ifeq ($(KERNELRELEASE), )
#内核路径
KERNEL_DIR =/home/feng/atomic/resource/linux-imx-rel_imx_4.1.15_2.1.0_ga
#当前文件路径
CURR_DIR = $(shell pwd)
all:
#编译模块
make -C $(KERNEL_DIR) M=$(CURR_DIR) modules
#编译应用程序
-$(CC) -o $(APP_NAME) main.c
clean:
#清除模块文件
make -C $(KERNEL_DIR) M=$(CURR_DIR) clean
#清除应用文件
-rm $(APP_NAME)
install:
#拷贝模块文件
#cp -raf $(TAR_KEY_NAME)_drv.ko $(TAR_KEY_NAME)_dev.ko $(DRV_DIR)
#cp -raf keyin.ko wq.ko timer.ko $(DRV_DIR_LIB)
cp -raf *.ko $(DRV_DIR_LIB)
#拷贝应用文件
-cp -raf $(APP_NAME) $(APP_DIR)
else
#指定编译什么文件
obj-m += $(TAR_NAME)_chrdrv.o chrdev.o
#obj-m += $(TAR_NAME).o
endif
结论
1、进入内核目录,执行make dtbs命令编译设备树;然后执行./cp_kernel.sh命令,拷贝设备树文件到tftp目录。
feng:linux-imx-rel_imx_4.1.15_2.1.0_ga$ make dtbs
CHK include/config/kernel.release
CHK include/generated/uapi/linux/version.h
CHK include/generated/utsrelease.h
make[1]: “include/generated/mach-types.h”已是最新。
CHK include/generated/bounds.h
CHK include/generated/asm-offsets.h
CALL scripts/checksyscalls.sh
DTC arch/arm/boot/dts/atomic.dtb
feng:linux-imx-rel_imx_4.1.15_2.1.0_ga$ ./cp_kernel.sh
feng:linux-imx-rel_imx_4.1.15_2.1.0_ga$
2、重启目标机,进入设备树目录(/proc/device-tree),查看相关设备节点是否挂载成功。
/ # cd /proc/device-tree/
/sys/firmware/devicetree/base # ls
#address-cells feng_alpha_led@020C406C
#size-cells interrupt-controller@00a01000
aliases memory
backlight model
chosen name
clocks pxp_v4l2
compatible regulators
cpus reserved-memory
fdts@77777777 soc
feng_alpha_gpiobeep sound
feng_alpha_gpiokey spi4
feng_alpha_gpioled
/sys/firmware/devicetree/base #
3、进入设备节点目录,查看设备节点信息。
/sys/firmware/devicetree/base # cd feng_alpha_gpioled/
/sys/firmware/devicetree/base/feng_alpha_gpioled # ls
compatible name pinctrl-0
feng_led_gpio pin pinctrl-names
/sys/firmware/devicetree/base/feng_alpha_gpioled # cat name
feng_alpha_gpioled/sys/firmware/devicetree/base/feng_alpha_gpioled # cat compatible
feng,alpha_pf_led/sys/firmware/devicetree/base/feng_alpha_gpioled #
4、进入模块目录,执行make命令编译模块;然后执行make install命令,拷贝模块到目标机指定目录。
feng:pf_gpio_dts$ make
#编译模块
make -C /home/feng/atomic/resource/linux-imx-rel_imx_4.1.15_2.1.0_ga M=/mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts modules
make[1]: 进入目录“/home/feng/atomic/resource/linux-imx-rel_imx_4.1.15_2.1.0_ga”
CC [M] /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/led_pf_gpio_dts_chrdrv.o
CC [M] /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/chrdev.o
Building modules, stage 2.
MODPOST 2 modules
CC /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/chrdev.mod.o
LD [M] /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/chrdev.ko
CC /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/led_pf_gpio_dts_chrdrv.mod.o
LD [M] /mnt/hgfs/Share/linux/atomic/driver/led/pf_gpio_dts/led_pf_gpio_dts_chrdrv.ko
make[1]: 离开目录“/home/feng/atomic/resource/linux-imx-rel_imx_4.1.15_2.1.0_ga”
#编译应用程序
arm-linux-gnueabihf-gcc -o led main.c
feng:pf_gpio_dts$ make install
#拷贝模块文件
#cp -raf _drv.ko _dev.ko /home/feng/atomic/rootfs/home/drv
#cp -raf keyin.ko wq.ko timer.ko /home/feng/atomic/rootfs/lib/modules/4.1.15
cp -raf *.ko /home/feng/atomic/rootfs/lib/modules/4.1.15
#拷贝应用文件
cp -raf led /home/feng/atomic/rootfs/home/app
feng:pf_gpio_dts$
5、在目标机上执行modprobe命令加载模块。
注意:在模块加载之前,需要先调用depmod命令,生成模块依赖文件。
/ # depmod
/ # modprobe led_pf_gpio_dts_chrdrv.ko
gpio_request ok...
gpio_direction_output ok...
register chrdev ok...
/ #
6、在目标机上运行应用测试程序打开LED,观察开发板LED是否点亮。
/ # /home/app/led on 1
led on...
/ #
7、在目标机上运行应用测试程序关闭LED,观察开发板LED是否熄灭。
/ # /home/app/led off 1
led off...
/ #
8、在目标机上执行modprobe -r命令卸载模块。
/ # modprobe -r led_pf_gpio_dts_chrdrv.ko
platform drv remove...
/ # lsmod
Module Size Used by Tainted: G
/ #
9、综上、示例展示了pinctrl和gpio子系统在实际项目中的使用方法。
往期 · 推荐
浅谈linux - 字符设备框架
帮你自动化办公的python-自动提取pdf指定页(项目概述)
也没想象中那么神秘的数据结构-一种通用化的双向链表设计(底层源码)
也没想象中那么神秘的数据结构-一环扣一环的“链表”(双向链表)
我用C语言玩对象,偷偷关注着你的观察者模式(基类设计)
