1. 转载前言
由于海思平台需要接入CAN设备,而3559平台的CAN接口没有驱动支持; 但是标准Linux是支持mcp2515驱动,作为CAN设备接入的
2. 需要修改内容
- SPI pinmux复用配置
- 内核开启mcp2515驱动
- dts配置
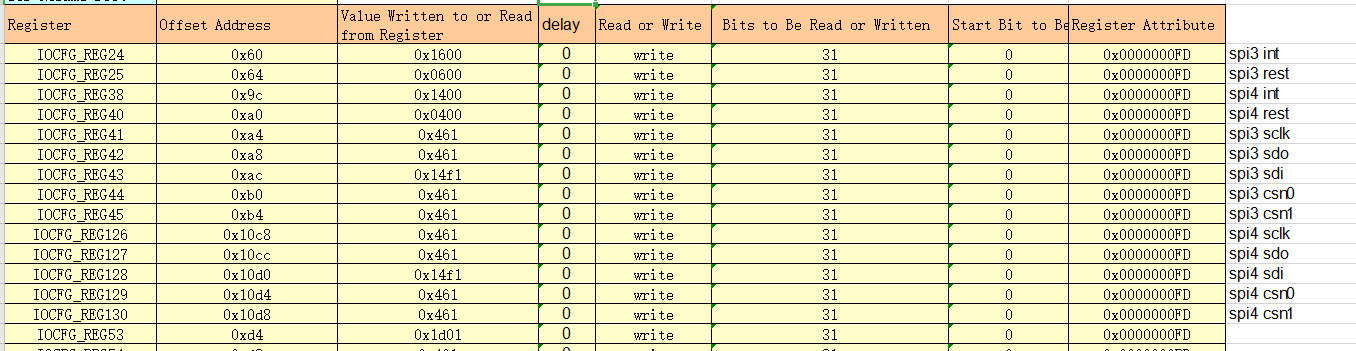
3. SPI pinmux 复用配置
由于mcp2515驱动加载时,是需要通过spi接口读取硬件状态的,所以必须提前配置。 这里有两种方法: 方法一:uboot里面配置 【这里我采用这种方法,方法如下】 方法二: mcp2515驱动probe函数里面添加pinmux复用配置
(1)修改uboot 参数表
(2)制作reg_info.bin
有两种方法,一种使用表格直接生成,另一种使用提供工具生成; 由于我这边WPS缺少库,所以只能使用工具生成,如下:
osdrv/tools/pc/uboot_tools目录下
解压
tar -zxvf hiregbin-v5.0.1.tgz
查看readme
修改工具执行权限
chmod 777 hiregbin
./hiregbin ./Hi3559AV100-DMEBLITE_8L_T-LPDDR4_2664M_8GB_32bitx2-A73_1608M.xlsm ./reg_info.bin
生成reg_info.bin
(3)生成uboot
将临时文件 reg_info.bin 拷贝到 SDK 中的“osdrv/opensource/uboot/u-boot-2016.11/”目
录下, 并命名为: .reg
make CROSS_COMPILE=aarch64-himix100-linux- u-boot-z.bin
烧写uboot即可
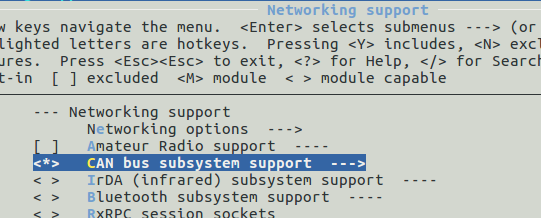
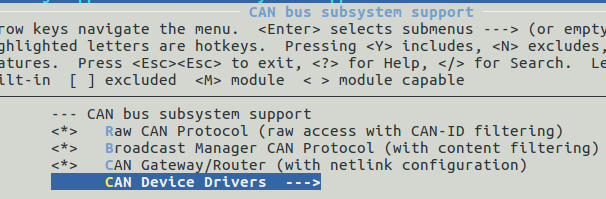
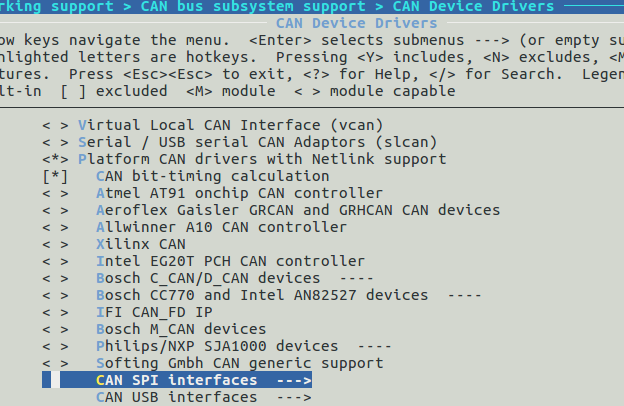
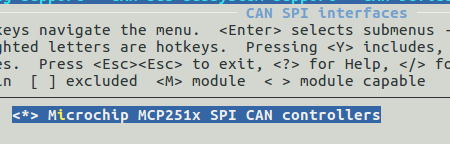
4. 内核开启mcp2515驱动
进入menuconfig make ARCH=arm64 menuconfig 步骤如下: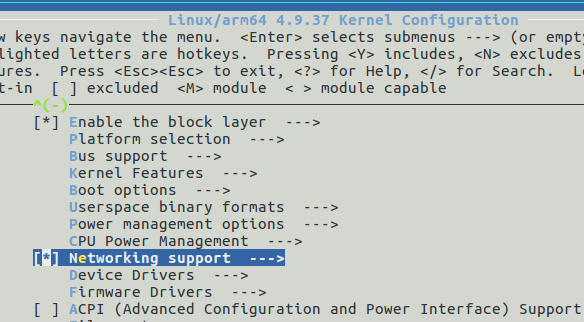
5. 内核设备树dts配置
修改路径: arch/arm64/boot/dts/hisilicon 硬件连接: MCP2515是挂在SPI1的片选0上的
(1)SPICAN设备配置
&spi_bus1{
status = "okay";
#if 0
spidev@0 {
compatible = "rohm,dh2228fv";
reg = <0>;
pl022,interface = <0>;
pl022,com-mode = <0>;
spi-max-frequency = <24750000>;
};
#endif
#if 1
can0: can@0 {
compatible = "microchip,mcp2515";
reg = <0>;
clocks = <&clk_16m>;
spi-max-frequency = <2000000>;
interrupt-parent = <&gpio_chip17>;
interrupts = <5 0x2>;
reset-gpios = <&gpio_chip17 6 0>;
status = "okay";
};
#endif
(2) 中断脚和复位脚配置
按照上面,中断脚和复位脚对照硬件,配置好GPIO
中断脚对应: GPIO17-5 复位脚对应: GPIO17-6
(3) 时钟配置
要注意的晶振时钟配置要与MCP2515一致,SPI的最大频率根据MCP2515接收端的承受能力来配置,驱动中会默认设置好传输速率
soc {
#address-cells = <1>;
#size-cells = <1>;
compatible = "simple-bus";
device_type = "soc";
interrupt-parent = <&gic>;
ranges = <0x0 0x00000000 0x0 0xffffffff>;
clk_3m: clk_3m {
compatible = "fixed-clock";
#clock-cells = <0>;
clock-frequency = <3000000>;
};
//add
clk_16m: clk_16m {
compatible = "fixed-clock";
#clock-cells = <0>;
clock-frequency = <16000000>;
};
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)