前言
阿里云ECS服务器默认是入网所有端口关闭,出网所有端口打开。我们在服务器上启动一个应用程序,默认是无法通过http://[公网ip]:[port]的方式访问的。
如果想要访问成功,阿里云ECS的网络端口进行两部分配置。
1:在控制台上添加安全组规则;
2:在服务器的防火墙上添加端口。
具体操作为:
1:在控制台上添加安全组规则
实例-到实例详情-配置规则

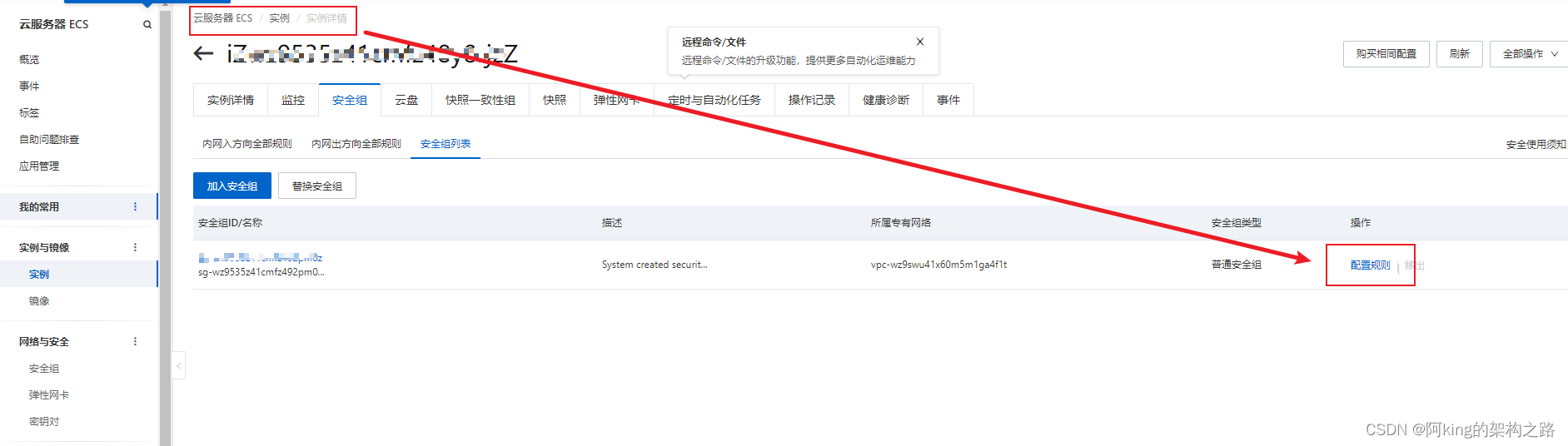
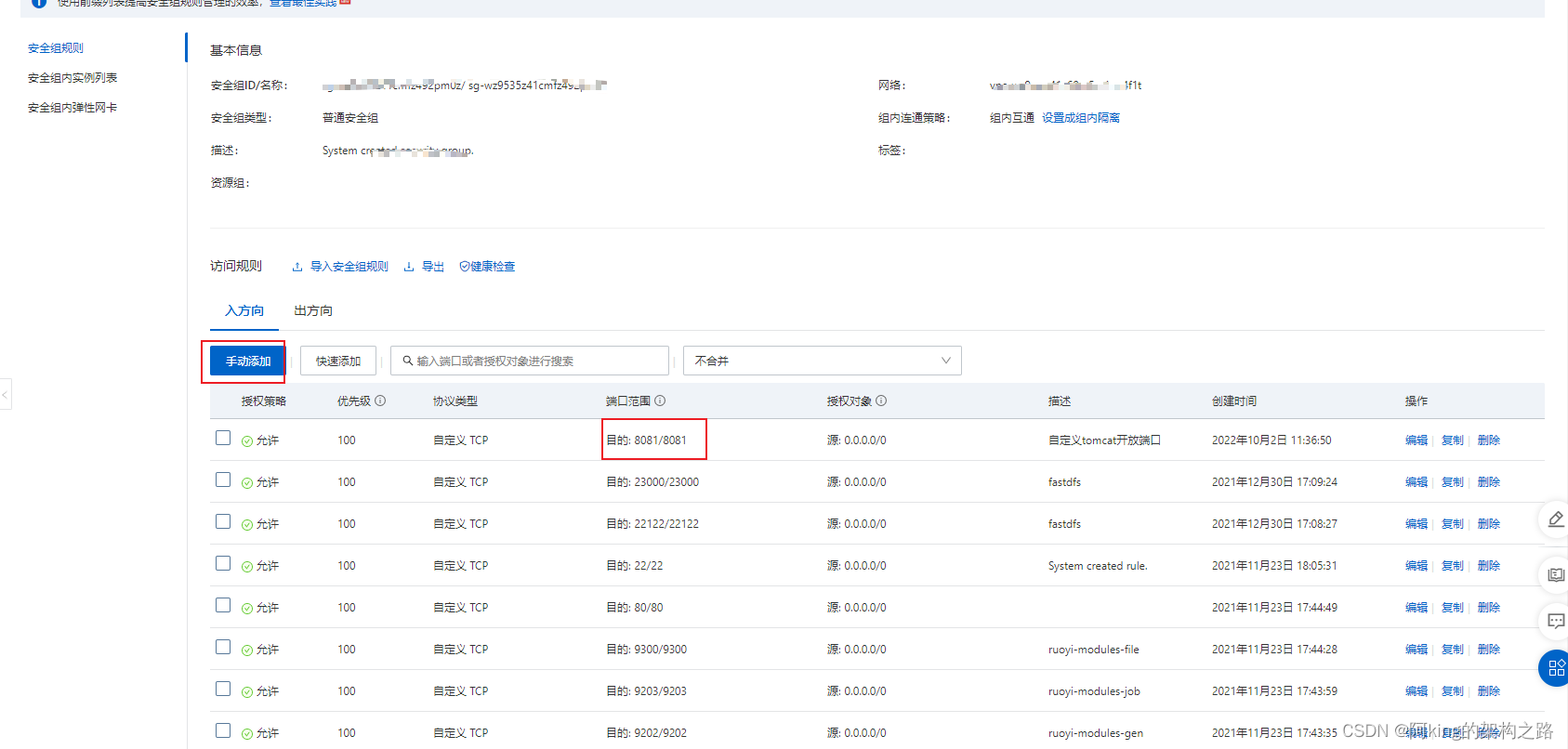
配置规则,添加需要开放的自定端口,例如这里的:开发8081端口,添加后保存
2:在服务器的防火墙上添加端口
(1)检查防火墙状态,systemctl status firewalld,如果显示active说明防火墙已开启
(2)查看某端口是否开启,firewall-cmd --query-port=8081/tcp,显示no说明端口没开启
或者查看所有已经开放的端口:firewall-cmd --list-all
(3)添加端口,firewall-cmd --add-port=8081/tcp --permanent
(4)重新载入,firewall-cmd --reload
(5)重启防火墙,systemctl restart firewalld
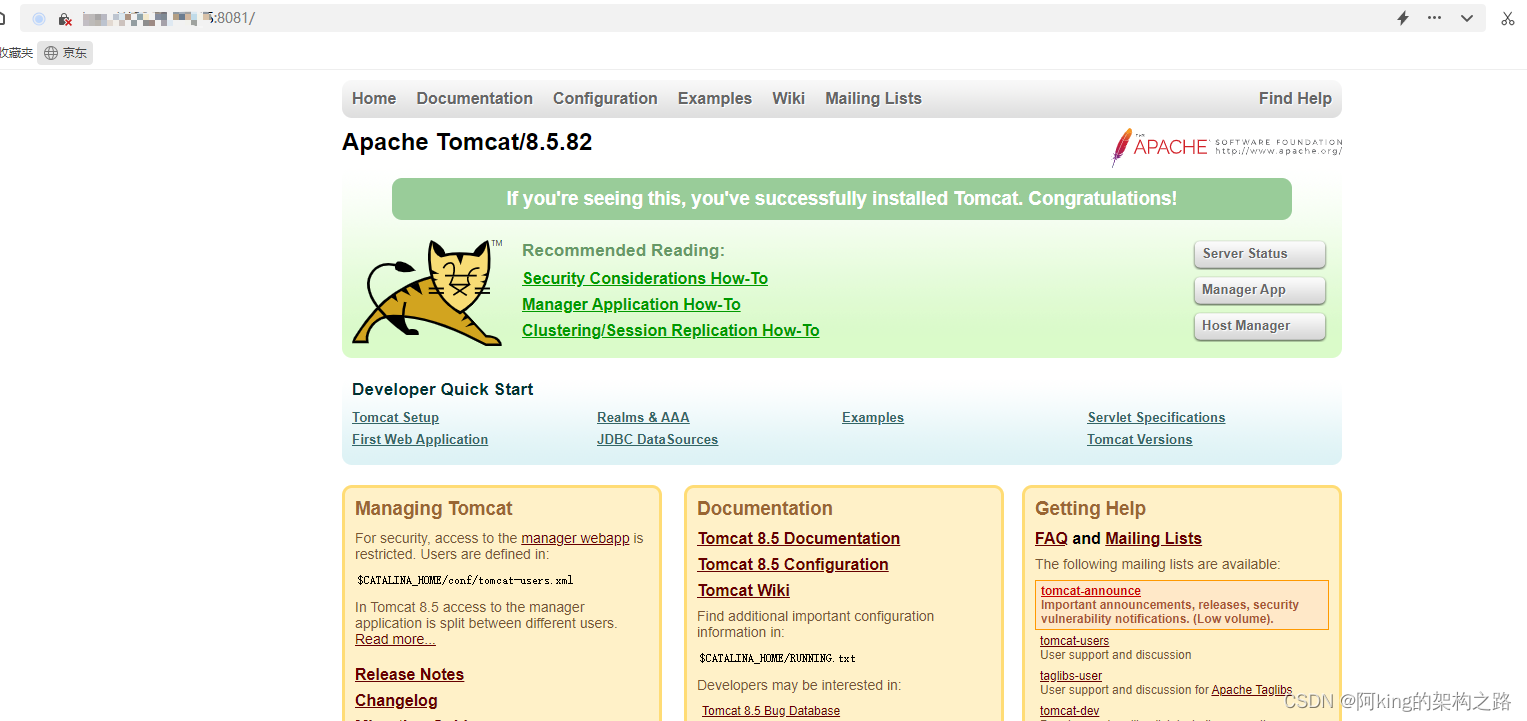
最后验证端口是否开放成功:
http://[ip]:[port]
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)