在我们日常工作中,个人文件、业务数据及应用信息的备份与恢复策略是一个重要的环节。意外删除、硬件故障、操作失误、网络攻击,甚至是自然灾害,都可以直接或间接导不可估价的数据损失。为了避免损失,缩少宕机时间,Ubuntu系统的用户都应当有意识地部署正确的备份与恢复策略,包括相关工具的选择。下面我们简单介绍ubuntu中两款强大的数据与恢复软件。
Deja Dup 可以备份ubuntu系统中的文件和目录到外部扩展磁盘、云存储或者计算机中的其他位置。在数据发生损坏的时候,它也可以很容易把相关的数据快速恢复过来。
而TimeShift则顾名思义,它就是一款强大的时光机,可以定期对系统进行快照处理。一旦系统发生错误,可以迅速恢复至前一个时光点,甚至是指定的时光点,而操作起来就像普通的系统更新一样简单。
一、Deja Dup
Deja Dup是Ubuntu预装软件之一,我们可以从ubuntu软件中心里直接搜索并安装,当然我们也可以直接在终端进行安装:
sudo apt install deja-dup
接下来我们来看看Deja Dup的备份设置
点击folders to save来配置要备份的目录
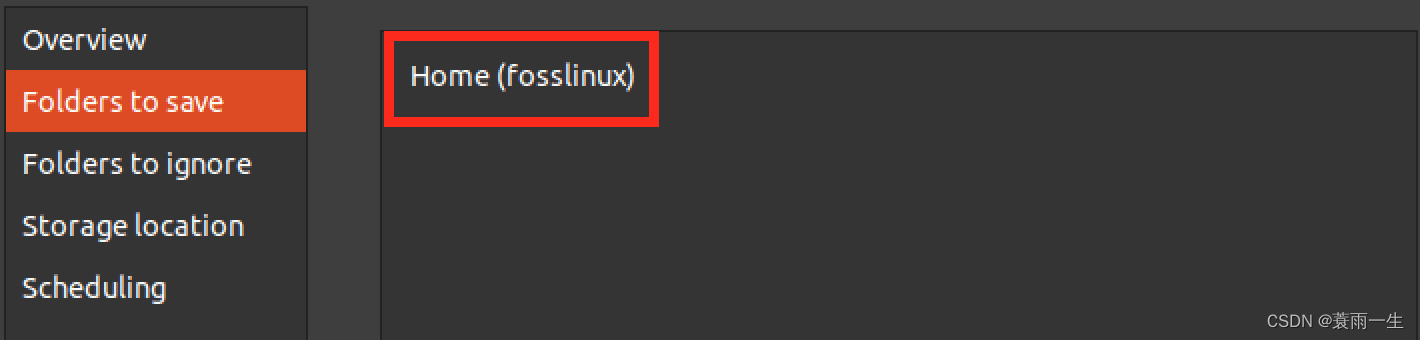
默认是备份home目录里的文件、文档和配置信息。当然我们也可以增加选择其他需要备份的目录。
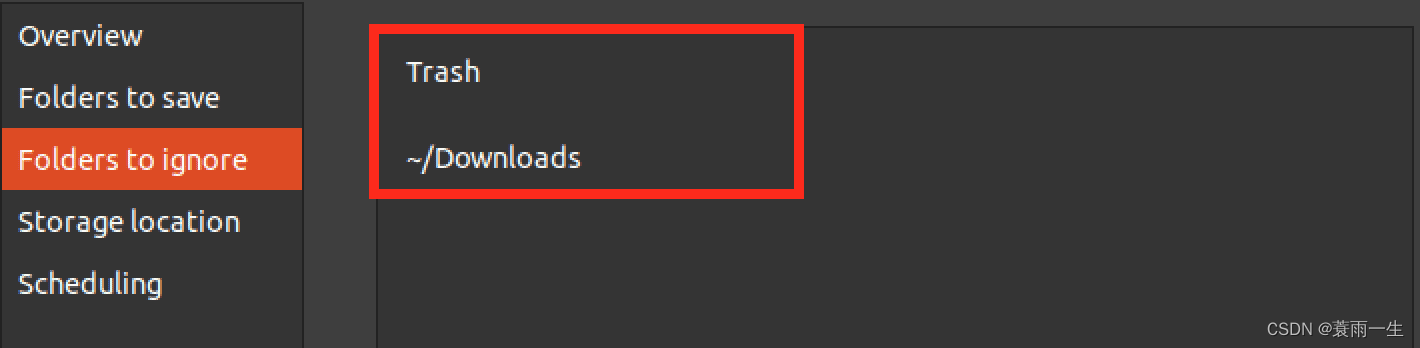
而Folders to ignore功能则是对选中的目录进行备份排除,即不备份该目录及相关文件。
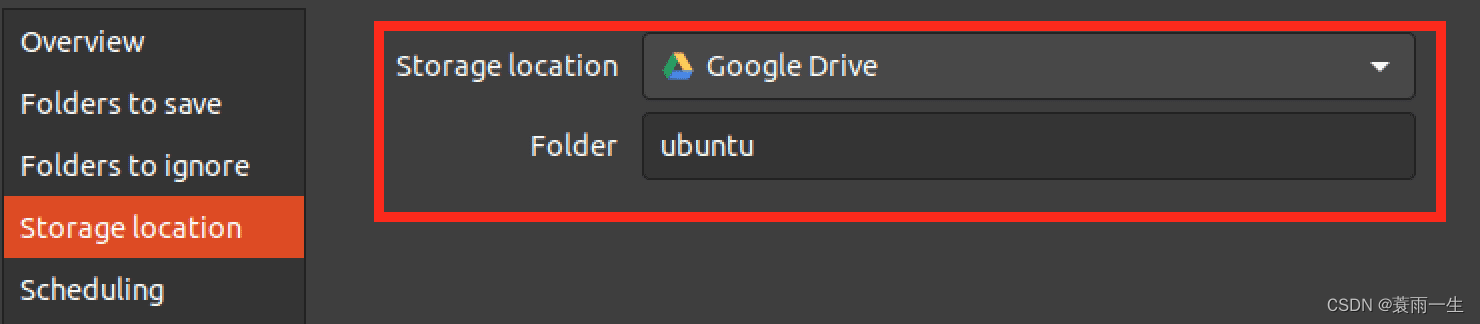
Storage location 节点可以让我们选择要存储备份数据的位置,可以是本地文件目录、云盘或者移动硬盘等。
Scheduling 节点可以让我们制定备份计划,默认是每周进行一次备份行为。也可以修改成每月或者每年备份一次。
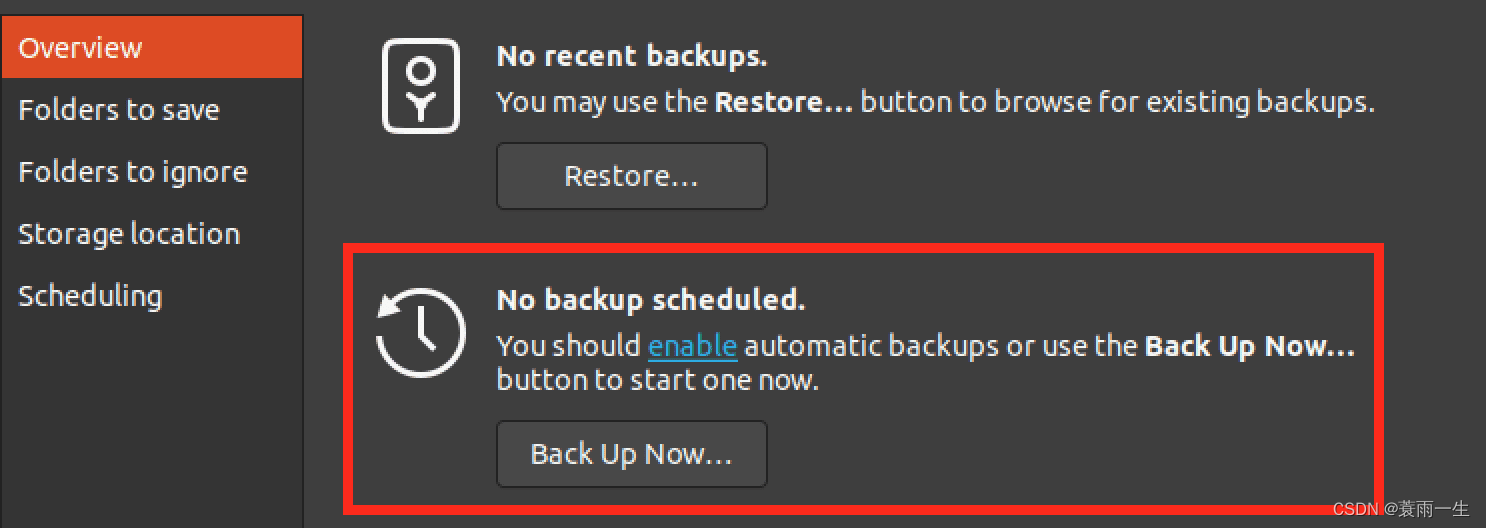
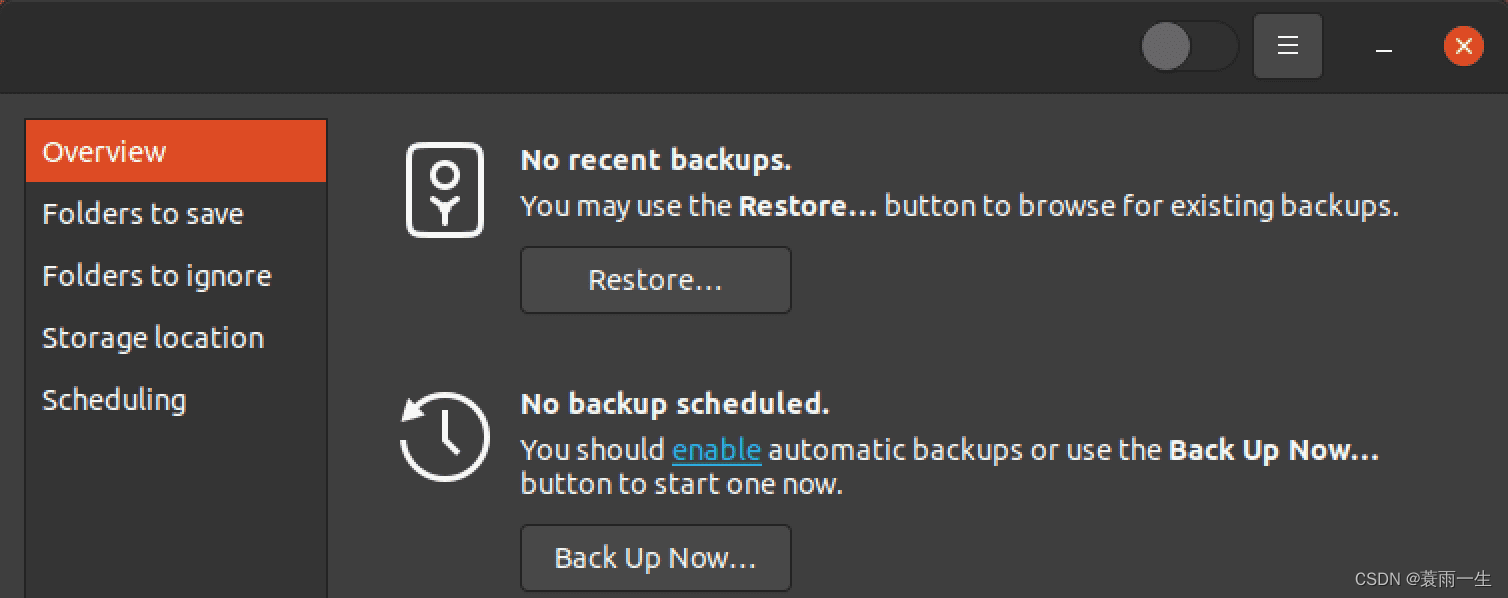
在overview节点,我们可以执行备份计划或者恢复行为。
下一篇,我们讲解用TimeShift备份和恢复系统。谢谢大家。
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)