摘要:明明我们在之前已经接触了数组,感到数组已经是万能的数据存储位置了。但是,如果我们一直在使用比较复杂的数据(也就是比较多的数据时),肯定会感到很反感。因为对于数组这种数据结构,在你自己使用之前,一定要对其大小进行一番定义。这样一来,它的存储空间在数据处理过程中便显得极为不方便。因为谁也不想对将要处理的数据做一个空间的预算,这几乎是所有程序员都很忌讳的,并且还要让其空间足够大,这样才能满足我们的要求(但如果分配的太多,难免会浪费内存)。

所以,这就是为啥你要用链表、学链表。
链表是一种数据结构,它弥补了数组带来的诸多不便,让我们可以任意为一些数据进行空间的分配,根据需要进行内存单元的开辟。
提到链表就必须要提到一个比较重要的知识点就是指针,因为前后数据要有关联,必须要进行一系列的连接和指向处理,那么扮演这个角色的就是指针,并且现在的编程语言中,指针是任何东西都没有办法去替代的。
如果你不太理解指针,那么建议你看看这篇文章:手把手教你写单片机的指针。
当然学习链表前,你还要有结构体的基本概念和知识,为啥?因为链表就是通过指针连接的多个结构体。每一个结构体中有一个存放指针的成员变量,并且,这个成员的类型是该结构体类型。每一个链表,都有这个自己的结点,这些结点是结构体的变量,当然,他们也是结构体类型的变量。
如果你不太理解结构体,那么建议你看看这篇文章:手把手教你写单片机的结构体。
当你看完理解了指针和结构体,如果想再进一步学习一下链表,然后再看这篇文章,你一定会有一种恍然大悟的感觉,你会发现指针、结构体、链表其实也不是很难。
话不多说,下面开始!
一、链表
1、链表基础知识
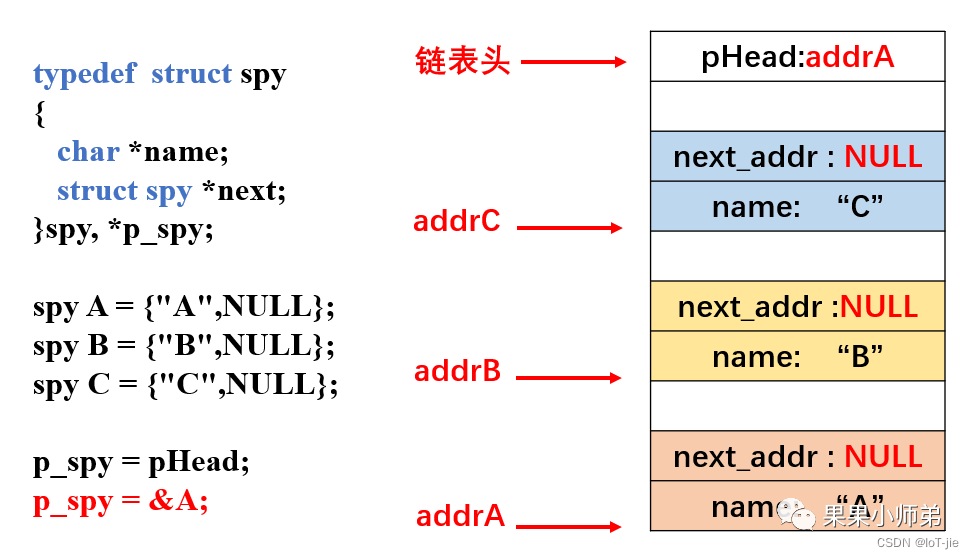
我们假设有三个特务,ABC。A的下线是B,B的下线是C。换句话说,就是A有B的地址,B有C的地址。写成代码就是这样:
//注::如果这个结构体你看不懂,回去补结构体的知识
typedef struct spy
{
char *name;
struct spy *next;
}spy, *p_spy;
spy A = {"A", NULL};
spy B = {"B", NULL};
spy C = {"C", NULL};
spy D = {"D", NULL};
int main( void )
{
p_spy pHead = NULL;
A.next = &B; //A的下线是B
B.next = &C; //B的下线是C
C.next = NULL;//C没有下线
pHead = &A;
}
画一个图:

首先,我们定义了三个结构体,ABC。在内存里面就必定有这三个结构体。再看看下面这句话,它会导致什么结果:A.next_addr=&B。

记住上面这个图,结构体A里面的next_address,等于B的地址。那蓝色箭头是我画出来的,只是给我们形象的认识而已,结构体A里面保存有B的地址。链表的核心就是:
这个链表结构体里面有一个指针,这个指针,等于其他结构体的地址。
用人类形象化的话来说,就是结构体A里面的某一个指针,指向结构体B。
首先作为一个链表,肯定有头部呀,我们怎么来确定这个链表的头部?实际上我们用一个指针来表示链表头,代码如下:

typedef struct spy {
char *name;
struct spy *next;
}spy, *p_spy;
p_spy pHead = NULL;
看一下这段代码,我们定义了三个结构体,还有一个结构体指针。它们都是变量,在内存里面都有对应的空间。

在上面的图里面,在红色方框里,我们用那个指针来表示链表头,现在这个链表头,它的值它是空的,也就是说它里面保存的地址是空的:这是一个空链表。
那么我们怎么往这个链表里面添加一个元素呢?先用一个图来表示,假设把结构体A放到列表里面去:
再看一下插入第一项非常简单,我让这个链表头直接等于结构体A的地址就可以了。我们用箭头来表示,让我们更加形象的去了解这个链表:
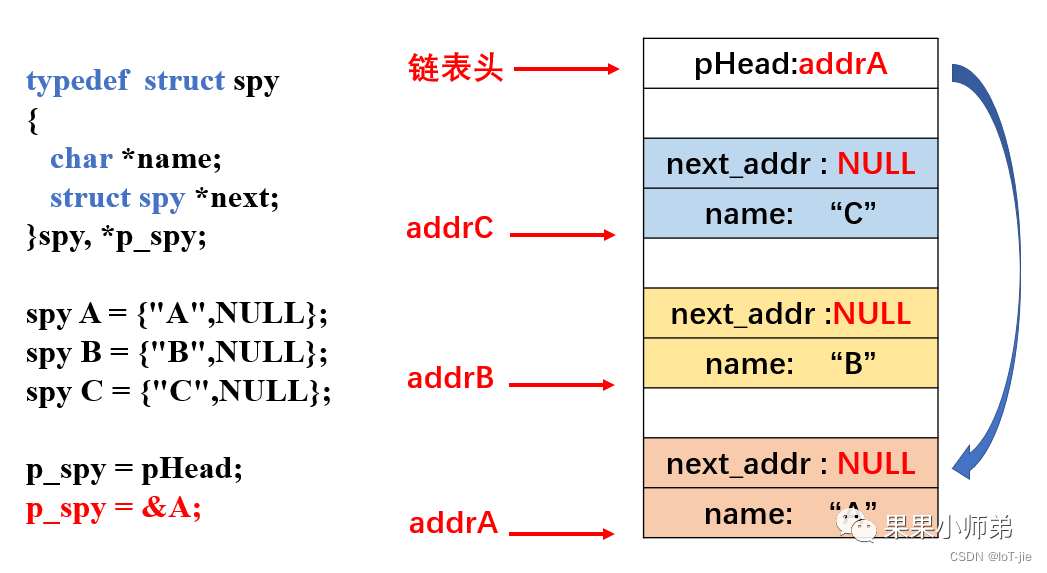
在这个图里面加了这个箭头,在代码里面可没有什么箭头,它只是pHead这个变量,它的值等于结构体A的地址。
2、链表的插入
现在再把一个结构体B放入链表。有两种方法,你是放在链表头部?还是放在链表尾部?画出一个图:

链表里面只有元素A,我们可以在A的左边插入这个新的元素B,也可以在A的右边插入这个新的元素B。也就是说,我们可以在链表的头部插入新的节点,也可以在列表的尾部插入新的节点。在图里面,上面那个就是把B插在链表的尾部,下面那个就是把B插在链表的头部。怎么写代码呢?
我们先来看看,把B插在链表的头部:
void InsertNodeToHead(spy newNode)
{
newNode->next_addr = pHead;//新插入节点的下一个节点为空
pHead = newNode; //头结点指向新插入的节点
}
画个图演示一下:

在这个图里面,左边是代码,右边是结果。假设一开始的时候先插入结构体A,执行图中标号为2的代码的时候,就是:A.next_addr=pHead等于初始值NULL。执行上图中标号为3的代码的时候,就是:pHead=A的地址。结果在上图里面右边地方,在图里面也写出了标号2、标号3。标号2那里A的next.address等于NULL,标号3那里pHead等于结构体A的地址。
下面,我们再来增加第2个元素B,我们在链表的头部插入元素B。
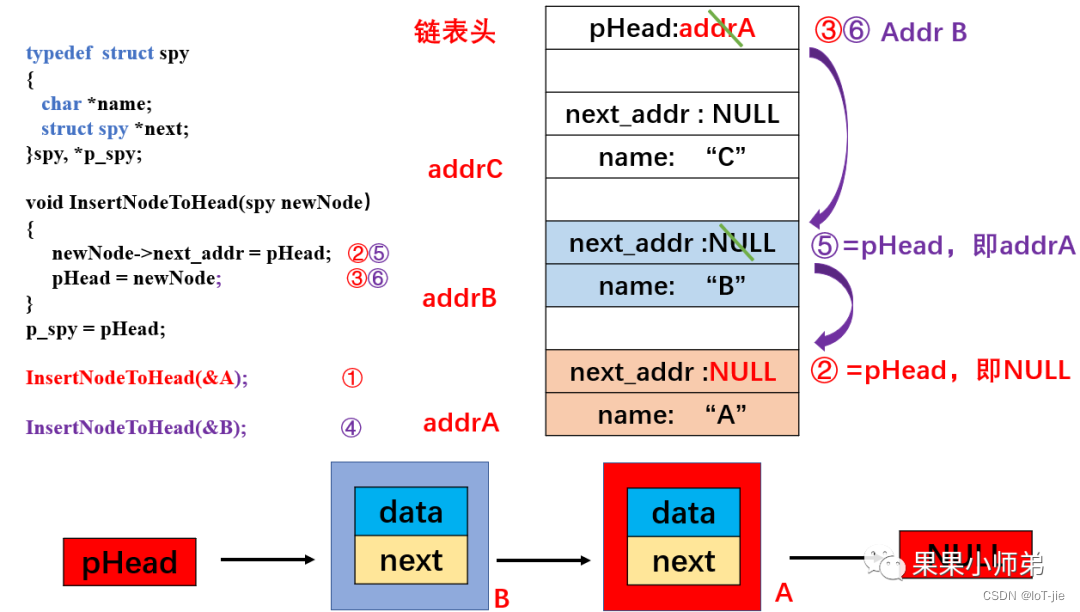
在这个图里面用蓝色的标号,把调用过程给标了出来。在左边是代码,看标号为4的代码,要用这个函数把元素B插入链表。怎么做呢?也分为两步:
不是插到头部去吗?那我就让B指向头部:
 但头部等于A,也实际上就是B指向了A。
但头部等于A,也实际上就是B指向了A。

也就说现在B指向了A,头部也指向了A。
让头部要指向B:

这就是一个完整的插入过程。这个图还要补充一下,让结尾指向NULL。

把链表,想成一个手拉着手的队伍,就容易理解了。刚才我们讲的是在链表的头部插入一个元素,那怎么在一个链表的尾部插入一个元素呢?
我们假设这个图里面它有好几个元素,我们在最后面一个元素的右边,再插入新元素。

得到的结果如下图所示:

tmp假设是最后一个元素,B是新元素。
tmp->next.addr=&B;
B.next addr = NULL;
问题的关键在于,我怎么在原来的列表里面找出最后一个元素。
主要是需要定义一个临时节点,然后使用一个while循环:
void insertNodeToTail(p_spy newNode)
{
p_spy temp;//定义一个临时节点
temp = head;//让头结点指向临时节点
while(temp)//在原来的列表里面找出最后一个元素
{
if (temp ->next == NULL)//找到了最后一个节点 temp就是最后一个节点
break;
else
temp = temp ->next;
}
temp ->next = newspy;//最后一个节点插入新节点
newspy->next = NULL;//新节点的下一个节点为空,这样就将新节点插入最后了
}
图中红圈处,它的特征是什么:它的next.addr等于NULL。如果不是最后一项的话,我们就取出他右边的那一项:temp = temp -> next.addr。这句话可能有些同学理解起来困难,这里画个图解释一下:

插入尾部的代码:
void InsertNodeToTail(p_spy newNode)
{
p_spy temp;//定义一个临时节点
if(pHead == NULL)//如果链表为空
{
pHead = newNode;
newNode->next = NULL;
}
else
{
temp= pHead ;//让头结点指向临时节点
while (temp)
{
if (temp->next == NULL) //找到了最后一个节点 temp就是最后一个节点
break;
else
temp= temp->next;
}
temp->next = newNode;//最后一个节点插入新节点
newNode->next = NULL;//新节点的下一个节点为空,这样就将新节点插入最后了
}
}
3、链表的删除
在链表中,怎么删除一个元素?
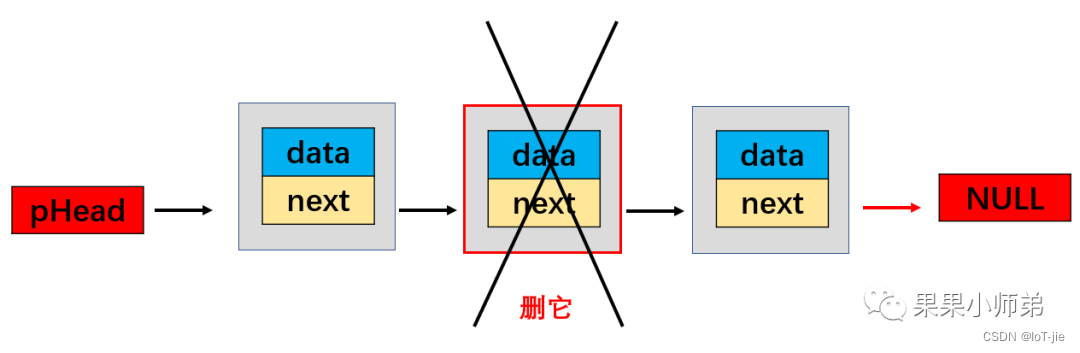
再看这个图,在链表中我们要删除红色方框的这个节点。再想象一下,在一个手牵着手的队伍里面,有一个人要走了,是不是他前面那个人要跟后面那个人牵手?

所以我们要找出前面那个人和后面那个人。假设temp是前面那个人,后面那个人是谁?needDeleteNode->next,needDeleteNode表示要删除的节点。代码怎么写呢:temp->next = 后面的人 = needDeleteNode->next所以关键在于我们怎么找到前面的人:temp。这也比较简单,遍历链表:
void RemoveNode(p_spy needDeleteNode)
{
p_spy temp;//定义一个临时的节点,用来遍历
if (pHead == needDeleteNode)//如果被删除的节点正好是头结点指向的那一个节点
{
pHead = needDeleteNode->next;//直接让头节点指向被删除节点的下一个节点
return;//返回
}
else
{
/* 找出NeedDeleteNode的上一个节点 */
temp = pHead;//让头结点指向临时节点temp
while(temp)
{
if (temp->next == needDeleteNode)//找到了,要删除的节点就是temp的下一个节点
break;
else
temp= temp->next;//继续找
}
if (temp)
{
temp->next = needDeleteNode-> next;//让被删除的上一个节点temp的下一个节点指向被删除节点的下一个节点,那么就把原来的要删除的节点给从链表中删除了。
}
}
}
也是一个循环,如果我的下一项就等于你的话,我就是你的前一个。找到之后,就执行这条指令:temp->next=后面的人=needDeleteNode->next。
4、链表的使用
/*------------------------1.链表和结点的定义----------------------------*/
/*结点结构体*/
typedef struct LIST_NODE {
int data; /*用于存放结点数据*/
struct LIST_NODE *pxNext; /*用于指向下一个结点*/
struct LIST_NODE *pxPrevious; /*用于指向上一个结点*/
}ListNode;
/*链表结构体*/
typedef struct LIST {
unsigned int NumberOfNodes; /*用于记录链表结点数量*/
ListNode RootNode; /*用于作为循环链表的参考点*/
}List;
/*------------------------2.链表和结点的初始化---------------------------*/
/*结点初始化*/
void ListInitialiseItem(ListNode *pxListNode, int value)
{
pxListNode->data = value; /*结点数据赋值*/
}
/*链表初始化*/
void ListInitialise(List *pxList)
{
pxList->RootNode.pxNext = &(pxList->RootNode); /*由于此时链表中没有结点,第一个结点指向自己*/
pxList->RootNode.pxPrevious = &(pxList->RootNode); /*由于此时链表中没有结点,第一个结点指向自己*/
pxList->NumberOfNodes = 1; /*链表结点计数初始化为1,也就是只有一个根结点*/
}
/*------------------------3.1结点插入链表---------------------------*/
void ListInsertEnd(List *pxList, ListNode *pxInsertListNode)
{
ListNode *pxNextNode = &(pxList->RootNode); /*插入结点的后结点*/
ListNode *pxPreviosNode = pxList->RootNode.pxPrevious; /*插入结点的前结点*/
pxInsertListNode->pxNext = pxNextNode; /*插入结点指向后结点*/
pxInsertListNode->pxPrevious = pxPreviosNode; /*插入结点指向前结点*/
pxPreviosNode->pxNext = pxInsertListNode; /*前结点指向插入结点*/
pxNextNode->pxPrevious = pxInsertListNode; /*后结点指向插入结点*/
(pxList->NumberOfNodes)++; /*链表结点计数加1*/
}
/*------------------------3.2链表删除结点---------------------------*/
void ListRemove(List *pxList, ListNode *pxIListToRemove)
{
ListNode *pxPreviosNode = pxIListToRemove->pxPrevious; /*删除结点的前结点*/
ListNode *pxNextNode = pxIListToRemove->pxNext; /*删除结点的后结点*/
pxNextNode->pxPrevious = pxPreviosNode; /*后结点指向前结点*/
pxPreviosNode->pxNext = pxNextNode; /*前结点指向后结点*/
(pxList->NumberOfNodes)--; /*链表结点计数减1*/
}
int main(void)
{
/*1.定义链表、结点*/
List list; //定义链表
ListNode list_node1; //定义结点1
ListNode list_node2; //定义结点2
/*2.初始化链表、结点*/
ListInitialise(&list);
ListInitialiseItem(&list_node1, 100);
ListInitialiseItem(&list_node2, 200);
/*3.插入链表*/
ListInsertEnd(&list, &list_node1);
ListInsertEnd(&list, &list_node2);
/*4.删除结点*/
ListRemove(&list, &list_node1);
return 0;
}

首先,我们定义了一个结构体:List list。它是一个变量,在内存里面必定有对应的空间。初始化完这个链表之后,它的结果就像上面的图表示的那样。因为这个链表内部有一个根节点,所以把它的节点个数设置为1。
这个链表一开始的时候只有一个元素,它的下一个元素是它自己,它的上一个元素也是它自己。这是一个双向的循环链表,双向循环链表稍微复杂一点,但是再怎么复杂,也就是使用两个单向链表组成的。

怎么样?链表是不是也没那么难?
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)