
摘要:
在物联网技术、电池能源技术、传感器技术不断发展的今天,无人机技术也变得日趋成熟起来,成为一大热门技术。
笔者主要对当下的无人机技术做出简单的分析,并且简单实践复现该项技术。囊括:无人机的结构、基本硬件与传感器、飞控算法以及其他一些应用于无人机上的技术。最后对笔者现阶段的一些成果进行总结,并致谢。
关键词:无人机、物联网、实践应用
Abstract:
With the continuous development of Internet of things technology, battery energy technology and sensor technology, UAV technology has become increasingly mature and become a hot technology.
The author mainly makes a simple analysis of the current UAV technology, and simply practice to reproduce the technology. It includes: UAV structure, basic hardware and sensors, flight control algorithm and other technologies applied to UAV. Finally, the author summarizes some achievements at this stage and expresses his thanks.
Key words: UAV , Internet of things,IoT , practical application
目录
- 1.无人机的机械结构与动力部分
- 1.1无人机的结构
- A.固定翼无人机
- B.直升机型无人机
- C.多旋翼无人机
-
- 1.2无人机的桨叶与动力
- 2.飞控基本硬件构成与传感器
- 2.1气压计(BMP280)
- 2.2 陀螺仪与加速度计(MPU6050)
- 2.3电子罗盘(HW101CT)
- 2.4 测距传感器(ToF)
- 2.4.1.激光测距(VL53L0X)
- 2.4.2.超声波测距(HC-SR04)
- 2.5飞控MCU(STM32H743)
- 3.无人机飞控算法(浅谈)
- 3.1卡尔曼滤波(Kalman filtering)
- 3.3串级PID、ADRC、MPC等其他的控制算法
- 3.4惯性导航(inertial navigation)
- 4.无人机上位机与视觉技术
- 4.1上位机介绍
- 4.2 双目视觉技术
- 4.3图像识别技术
- 5.结语 致谢
- 参考文献
1.无人机的机械结构与动力部分
1.1无人机的结构
无人机结构主要是指无人机的硬件结构。现代无人机有各种各样的应用,以此衍生出多种结构、原理的无人机。按飞行平台构型的不同可分为固定翼无人机、无 人直升机、多旋翼无人机等等。在这里,笔者主要对最常见的固定翼、多旋翼、直升机三种类型进行讨论。
A.固定翼无人机
 图:一种固定翼型无人机
图:一种固定翼型无人机
固定翼飞机原理简述:
该类型飞机一般依靠 由前拉式螺旋桨 或 后推式螺旋桨 或 涵道推进器等等组成的推进系统产生前进的动力,从而使飞机快速前行。
当飞机获得了前进的速度后,由气流的作用到飞机的翼展上产生上升的升力,当升力大于机身重力时,飞机处于上升飞行状态。飞机的左右(横滚)方向的平衡依靠左右主机翼的掠角大小来调节,前后(俯仰)方向的平衡依靠尾舵的掠角来调节,方向(航向)角依靠垂向尾舵来调节。
B.直升机型无人机
 图 :一种直升机型无人机
图 :一种直升机型无人机
直升飞机原理简述:
直升飞机的主动力系统只有一个大型的螺旋桨,主要作用是提供飞行的上升动力,所以当上升动力大于机身重力时,飞机处于上升状态。而由于直升机只有一个主动力桨,当主动力电机高速旋转时,螺旋桨的旋转会对机身产生一个反向的作用力——反扭力。在反扭力的作用下,飞机会产生与螺旋桨旋转方向相反的自旋。为了解决直升机的自旋,就需要在飞机的尾部追加一个水平方向的小型螺旋桨,其产生的推力主要用于抵消机身自旋,当直升机需要改变航向时,也可以通过尾部螺旋桨来调节。除了主动力电机与尾翼电机之外,通常还有多个个舵机,用于改变主动力桨的螺距,使机身产生横滚和俯仰姿态,从而使飞机前飞、后飞或向左、向右飞行。
C.多旋翼无人机

图 : 一种多旋翼型无人机
多旋翼飞机原理简述:
多旋翼无人机是由三个、四个或更多螺旋桨所组成的无机。最典型、最常见的就是四旋翼直升机。四旋翼无人机有四个轴,安装四个螺旋桨,同样可以由螺旋桨的高速旋转产生向上的拉力实现垂直起降。但与直升机不同的是,多旋翼的前进、后退、向左、向右飞行则是靠的是四个螺旋桨不同的转速产生不同推力实现的。
常见无人机类型的对比
| 结构类型 | 优点 | 缺点 |
|---|
| 固定翼 | 续航时间长,速度快。 | 需要跑道,不能垂直起降。 |
| 直升机 | 可以垂直起降,空中悬停。 | 续航时间短,机械结构繁杂。操控难度大,飞行速度慢。 |
| 多旋翼 | 可以垂直起降,空中悬停,结构简单,操作灵活。 | 续航时间短,飞行速度慢。 |
实验无人机的选型与制作
考虑到实验大多在室内进行,没有大型的起降场地,并且研究的重点不在机械结构等等,最终选择了对多旋翼机型进行研究。
而由于需要无人机具有较大的载重以搭载边缘计算设备与诸多传感器,则需要无人机具有较多的桨叶提供更大的升力,最终笔者选择了“X8”(8旋翼、双桨共轴)结构的无人机进行研究。
 图 :X8双桨共轴型无人机
图 :X8双桨共轴型无人机
安装过程不过多赘述,最终完成如图。

图 :笔者所使用的无人机的展示
1.2无人机的桨叶与动力
经过参靠学习,笔者对为实验所设计无人机的“双桨共轴”动力系统有了一些显浅的了解:
“双层反转的螺旋桨,使桨尖涡流互相抵消,而减小了诱导阻力,效率又比其中的单层叶片有所提高”
“随着桨尖间隙的增加,系统拉力和功率载荷不断减小.存在一个临界桨尖间隙,在该桨尖间隙附近,桨尖涡显著增强,引起涵道和螺旋桨的拉力分配关系急剧变化,功率载荷迅速降低,系统气动性能明显恶化;在较大的桨尖间隙下,间隙泄漏流会表现出较为明显的非定常现象。”
“增加共轴双桨的双桨轴向间距会导致系统拉力增加,功率载荷减小.但是,由于涵道对螺旋桨滑流的改善作用,双桨间距对系统总体气动性能的影响并不显著。”

图 : 涵道风扇气动力随桨尖间隙比变化图
2.飞控基本硬件构成与传感器
笔者采用的是ACfly开源飞控,是一款基于STM32H743处理器,搭载BMI088(陀螺仪加速度计)、IST8310(磁罗盘)、SPL06(气压计)等等传感器的开源飞控。
下面对飞控上搭载的各种传感器的原理进行简单的探究:
2.1气压计(BMP280)
气压计,也就是飞机上搭载的能对周围气压强度进行检查的传感器。主要用于通过气压的变化推算出飞机当前高度信息。
原理简述:
气压计的传感元件是一个对压强敏感的薄膜,它连接了一个柔性电阻器。当被测气体的压强降低或升高时,这个薄膜变形,该电阻器的阻值将会改变。再经过A/D转换由数据采集器接收,然后数据采集器以适当的通讯协议将信息发送出。
也有一些气压计的传感原件使用的主要部件为变容式硅膜盒。当该变容硅膜盒外界大气压力发生变化时,单晶硅膜盒随着发生弹性变形,从而引起硅膜盒平行板电容器电容量的变化。同样也是将这个变化的信息由数据采集器接收并且传送给飞控控制芯片。
实践部分:
这里笔者为探究气压计的原理,使用的是Bosch(博世)公司的一款气压传感器BMP280:

图 :搭载BMP280芯片的模块
该芯片在处理完成气压信息后,可以以IIC或SPI总线将信号发送出,这里笔者在IIC总线上接受它的信息:

图 :BMP280芯片的iic协议说明
为了实验方便,笔者用arduino读取BMP280在IIC总线上的信息:

图 :读取BMP280在IIC信息程序
并用arduino的串口进行打印数据:

图 :arduino串口通讯程序
最终取得的效果:

图 : 接收到的BMP280芯片数据
2.2 陀螺仪与加速度计(MPU6050)
陀螺仪与加速度计,分别由三个单轴的加速度计和三个单轴的陀螺仪组成,也就是IMU,全称inertial measurement unit,即惯性测量单元。加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺仪检测载体相对于导航坐标系的角速度信号,对这些信号进行处理之后,便可解算出物体的姿态。
IMU所得到的惯性数据可以用于惯性导航算法,预测移动路径等等。所以在很多场合经常需要GPS与IMU相互补偿,如GPS获取1Hz的位置信息,而IMU在间隙进行惯导预测与校准。
原理简述:
可以通过一个通俗易懂的盒子模型来理解,假设在失重环境下有一个球放在一个方盒子中,在没有收到任何其它外力的作用下,圆球漂浮在盒子的中央位置。而盒子的加速运动、在重力场内的倾斜等等动作都会影响小球的位置与对各个方向的压力,通过检测盒子各个面所受到的压力,即可反推至盒子的倾斜情况与加速度情况。

图 :IMU原理简图
实践部分:
为探究IMU的原理,笔者采用了一款极具代表性的芯片:TDK InvenSense(应美盛)公司的MPU6050芯片,

图 : MPU6050 芯片与模块介绍
同样的,MPU6050也支持IIC通讯

图 : MPU6050的iic协议说明
笔者在arduino中实现:

图 : 读取MPU6050模块的程序
最终获得结果:
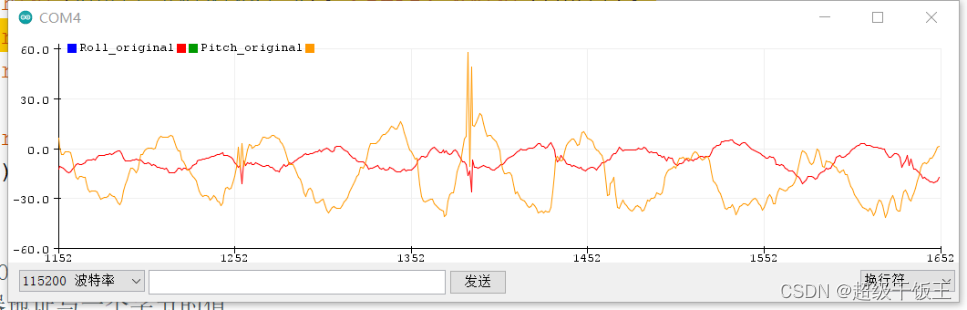
图 :MPU6050获取传感器结果
2.3电子罗盘(HW101CT)
在无人机上,必将会搭载的另一个传感器就是电子罗盘了。三维电子罗盘由三维磁阻传感器、双轴倾角传感器和MCU构成。三维磁阻传感器用来测量地球磁场,倾角传感器是在磁力仪非水平状态时进行补偿;
内部MCU处理磁力仪和倾角传感器的信号以及数据输出和软铁、硬铁补偿。该磁力仪是采用三个互相垂直的磁阻传感器,每个轴向上的传感器检测在该方向上的地磁场强度。
随着微电子集成技术以及加工工艺、材料技术的不断发展。电子罗盘的研究制造与运用也达到了一个前所未有的水平。电子罗盘按照有无倾角补偿可以分为平面电子罗盘和三维电子罗盘,也可以按照传感器的不同分为磁阻效应传感器、霍尔效应传感器和磁通门传感器。
在这里笔者将使用维特智能公司的一款电子罗盘传感器HW101CT,

图 : 电子罗盘传感器HW101CT
其使用的就是磁通门传感器,磁饱和法是基于磁调制原理,即利用被测磁场中铁磁材料磁芯在交变磁场的饱和励磁下其磁感应强度与磁场强度的非线性关系来测量弱磁场的一种方法。应用磁饱和法测量磁场的磁强计称为磁饱和磁强计,也称磁通门磁强计或铁磁探针磁强计。
该模块支持串口通讯,笔者使用arduino在串口读取输出的内容,解算后传回电脑。

图 : HW101CT模块获得的角度信息
2.4 测距传感器(ToF)
在无人机上,常常会搭载诸多的距离传感器,主要是应用了ToF(飞行时间)方案,如超声波测距传感器、激光传感器等等,笔者在此以应用最广泛的激光于超声波两种传感器简单研究。
ToF简述:
TOF是Time of flight的简写,直译为飞行时间的意思。飞行时间技术在广义上可理解为通过测量物体、粒子或波在固定介质中飞越一定距离所耗费时间(介质/距离/时间均为已知或可测量),从而进一步理解离子或媒介某些性质的技术。
ToF测距方法属于双向测距技术,它主要利用信号在两个异步收发机(Transceiver)(或被反射面)之间往返的飞行时间来测量节点间的距离。传统的测距技术分为双向测距技术和单向测距技术。在信号电平比较好调制或在非视距视线环境下,基于RSSI(Received Signal Strength Indication,接收的信号强度指示)测距方法估算的结果比较理想;在视距视线环境下,基于ToF距离估算方法能够弥补基于RSSI距离估算方法的不足。
该项技术最早在超声波测距中被使用,后续在声、光等各种技术上被应用。
在此,笔者使用了VL53L0X(激光测距传感器)、HC-SR04(超声波测距传感器)两款进行简单的研究。
2.4.1.激光测距(VL53L0X)


图 : VL53L0X激光模块
原理简述:
该模块采用940nm垂直腔面发射激光器(Vertical-Cavity Surface-Emitting Laser,简称VCSEL)发射出激光,激光碰到障碍物后反射回来被VL53L0X接收到,测量激光在空气中的传播时间,进而得到距离。
简单实现:
同样的支持IIC通讯,笔者在arduino实现,效果如下:

图 : VL53L0X激光模块检测得到的距离信息
2.4.2.超声波测距(HC-SR04)

图 : HC-SR04超声波测距模块
HC-SR04作为一款成熟的超声波传感器方案,可以提供50px–450m的非接触式距离感测功能。由超声波发射器、接收器与控制电路等组成。
原理简述:
超声波测距模块一触发信号后发射超声波,当超声波投射到物体而反射回来时,模块输出一回响信号,以触发信号和回响信号间的时间差,来判定物体的距离。超声波传感器有敏感范围大,无视觉盲区,不受障碍物干扰等特点。
简单实现:
该款传感器同时支持UART、IIC与一般io操作,为研究方便,笔者使用Arduino 通过 Trig 引脚给模块,不少于10us 数字信号(高电平),触发模块发射出 40KHz 的超声波,接收到返回声波后,Echo 输出高电平,根据触发和输出的时间差,就可以换算出距离。

图 :实现超声波测距的程序
得到数据:

图 :HC-SR04 测得的距离信息
2.5飞控MCU(STM32H743)
飞控中必定会包含的一个部分就是提供数据处理与计算能力、IO输入输出能力的MCU。由它获取各种传感器检测的数据,并且对数据进行解算、滤波等,最终输出信号调节飞机的动力部分输出,以此控制飞机的运动。
在这次的学习中,笔者使用的ACfly搭载的MCU是STM32H743,关于STM32、MCU等等的知识已有大量的资料,笔者在此不过多赘述。
3.无人机飞控算法(浅谈)
无人机飞控中运行着数据解算、滤波、权重融合等等多种算法,其中以:卡尔曼滤波、多种闭环控制、惯性导航三大算法为主,笔者在此仅对其进行粗略的研究。
3.1卡尔曼滤波(Kalman filtering)
卡尔曼滤波由斯坦利·施密特 (Stanley Schmidt)提出,并在1958年首次实现了卡尔曼滤波器。
卡尔曼滤波是一种利用 线性系统 状态方程,通过系统输入输出观测数据,对 系统状态 进行最优估计的算法。 由于观测数据中包括系统中的噪声和干扰的影响,所以最优估计也可看作是 滤波 过程。 数据滤波是去除 噪声 还原真实数据的一种 数据处理 技术,Kalman滤波在测量方差已知的情况下能够从一系列存在测量噪声的数据中,估计动态系统的状态。
由于它便于计算机 编程 实现,并能够对现场采集的数据进行实时的更新和处理,Kalman滤波是目前应用最为广泛的滤波方法,在通信,导航,制导与控制等多领域得到了较好的应用。

图 :卡尔曼滤波原理
对于卡尔曼滤波的具体原理,相对比较复杂,笔者在此仅对该算法简单实现,不做理论研究。
卡尔曼滤波器适用于线性、离散和有限维系统,在之前获取IMU数据的时候发现得到的数据非常散乱,显然这样子的场景是适用的。同样的,使用arduino实现:

图 : 调用函数实现滤波
最终得到的数据,明显更加稳定且贴近实际变化趋势:

图 :滤波后MPU6050得到的数据
3.2 PID闭环控制(proportion integration differentiation)
在工业应用中PID及其衍生算法是应用最广泛的算法之一,是当之无愧的万能算法,也是最经典的算法。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。
具体的算法其实并不复杂:

图 :pid控制原理

图 :pid控制公式表示
笔者将利用PID控制对一颗直流电机实现控制。
直流电机接上编码器,电机每旋转一圈,编码器输出300个脉冲信号,
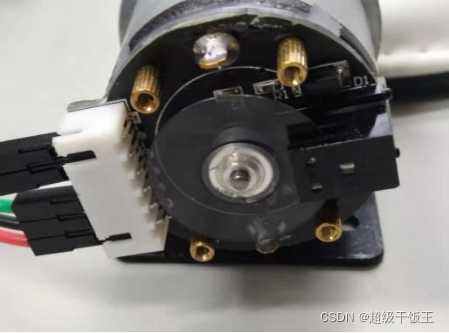
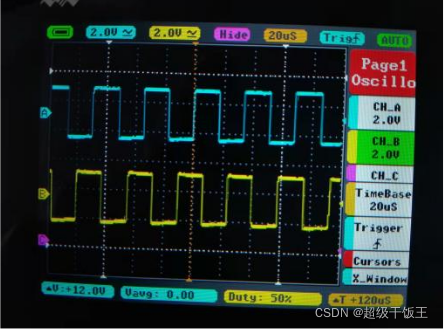
arduino读取一段时间内的脉冲数,以此实现测速。

图 : 光电编码器、编码器信号、读取编码器信息的程序
获得速度后,与目标值比较并接入PID算法,后由arduino输出PWM信号,调控场效应管(MOS)以改变电机的电压,实现对电机的闭环控制。

图 : 场效应管模块
最终能实现对电机速度的检测与闭环控制:

图 : 提供pid控制调控的电机转速
3.3串级PID、ADRC、MPC等其他的控制算法
在实际的应用中,单个PID的闭环控制可能不能完全满足调制需要,下面浅略的介绍其他几种闭环控制算法。
串级PID(PID cascade control):
虽然我们可以找到不同的PID参数以实现快速收敛控制,或者无超调控制,但是单级的PID控制依然存在一些问题。以笔者研究的无人机举例,当电调(ESC:electric speed controler)接受到飞控提供的PWM信号后,控制无刷电极旋转,使得桨叶产生推力,但是当环境发生改变,如气压、空速出现变化时,桨叶产生的推力就不是理想的数值了。也就是调控反馈应该输出的推力F不等于实际产生的推力F’,这个时候就可能会出现 但不限于 达到收敛推力F’’变慢、无超调控制的PID参数出现超调、飞机在平衡位置附近振荡等情况。此时就可以引入一个内环控制,专门在F与F’之间进行调节。

图 : 串级pid原理简图
这种方案被称为串级PID(PID cascade control)。当内环回路参数在物理上可测时,往往会引入该控制方案,进一步加强控制系统的稳定性。在无人机控制系统中,速度闭环常作为串级PID的内环,位置闭环常做串级PID的外环,有时也会引入加速度等实现多串级的调控。
自抗扰控制器(ADRC:Active Disturbance Rejection Control):
在笔者使用的飞控中,采用的是自抗扰控制器(ADRC:Active Disturbance Rejection Control)。
自抗扰控制器自PID控制器演变过来,采取了PID误差反馈控制的核心理念。传统PID控制直接取参考给定与输出反馈之差作为控制信号,导致出现响应快速性与超调性的矛盾。

图 :DARC原理简图
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。
扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。
设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。
模型预测控制(MPC:Model Predictive Control):
MPC是一种基于对受控对象进行预测的控制方法。
其中涉及了:过程内环动态模型;控制量的历史数值;在预测区间上的一个最优值方程J。最优控制量可由以上各量求出。
MPC最大的特点在于,相对于LQR控制而言,MPC可以考虑空间状态变量的各种约束,而LQR,PID等控制只能够考虑输入输出变量的各种约束。同时,MPC可应用于线性和非线性系统。
由于MPC控制算法相对复杂得多,所以笔者在此仅简单介绍。
3.4惯性导航(inertial navigation)
惯性导航是一种利用惯性元件(加速度计)来测量运载体本身的加速度,经过积分和运算得到速度和位置,从而达到对运载体导航定位的导航技术。
组成惯性导航系统的设备都安装在运载体内,工作时不依赖外界信息,也不向外界辐射能量,不易受到干扰,是一种自主式导航系统。
在无人机的内,如果失去所有对外传感器的定位信息,无人机也可以通过内置的加速度计、电子罗盘、电子陀螺仪等惯性测量元件来获取信息,实现短时间内的导航。同时,外部定位设备(如GPS等)可能会出现定位频率低、间隔长,无法实现在某一特定时间点的定位等问题,此时利用IMU实现的惯性导航系统则可以在间隔时间内对位置进行预测,同时在获取到外部数据后进行校准,提高了无人机定位的精准度。
惯性导航系统属于一种推算导航方式.即从一已知点的位置根据连续测得的运载体航向角和速度推算出其下一点的位置.因而可连续测出运动体的当前位置。
惯性导航系统中的陀螺仪用来形成一个导航坐标系使加速度计的测量轴稳定在该坐标系中并给出航向和姿态角;加速度计用来测量运动体的加速度经过对时间的一次积分得到速度,速度再经过对时间的一次积分即可得到距离。
惯性导航系统有如下主要优点.(1)由于它是不依赖于任何外部信息.也不向外部辐射能量的自主式系统.故隐蔽性好且不受外界电磁干扰的影响;(2)可全天侯全球、全时间地工作于空中地球表面乃至水下.(3)能提供位置、速度、航向和姿态角数据,所产生的导航信息连续性好而且噪声低.(4)数据更新率高、短期精度和稳定性好.
其缺点是:(1)由于导航信息经过积分而产生,定位误差随时间而增大,长期精度差;(2)每次使用之前需要较长的初始对准时间;(3)设备的价格较昂贵;(4)不能给出时间信息。
4.无人机上位机与视觉技术
4.1上位机介绍
在实际的项目中,无人机可能需要完成一些复杂的任务,需要具备对大规模数据(视频、图像、音频等数据流)的运算能力,当下人工智能技术、图像处理技术等迅猛发展,许多无人机都具备了采集视频或其他信息并进行处理的能力。
要想为无人机提供足够的算力,我们需要让其搭载某些相对低功耗、高算力的设备。同时为满足对动力部分的高速相应控制,现代无人机多会采用上下位机组合的方式对无人机整体进行控制。即上位机负责大规模运算,下位机负责高速响应控制。
笔者在制作实验无人机使使用的是英伟达(nVidia)公司的Jetson nano-4G开发板作为上位机。

图 : 笔者在飞机上安装的jetson nano
Jetson Nano 是一款功能强大的小型计算机,专为支持入门级边缘 AI 应用程序和设备而设计。完善的 NVIDIA JetPack™ SDK 包含用于深度学习、计算机视觉、图形、多媒体等方面的加速库。其具有128核Maxwell GPU ,ARM® A57 @ 1.43 GHz 四核CPU,4GB LPDDR4 内存,配合TensorRT加速,使其具有相对强大的图形运算能力。
4.2 双目视觉技术
双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。

图 :双目视觉技术
双目立体视觉融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图像,通过视差图像,可以完成3维的云点图的建立,进一步完成定位、避障等操作。
双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。
在无人机领域,通常会提供搭载双目相机实现对周围立体环境的观察,应用于3D建图、3维避障、视觉定位等场景。
笔者也在无人机上搭载了双目视觉系统(intel t265)。

图 :笔者使用的T265相机
英特尔实感追踪摄像头 T265 小巧,功耗低,能提供现成可用的追踪定位能力。具有跨平台、开发人员友好的同步定位与建图功能,可满足几乎所有的机器人、无人机和增强现实快速原型制作需求。这款设备采用直接在设备上运行的高度优化的专有 V‑SLAM 算法,运行功率仅为 1.5W。
T265 包含两个鱼眼镜头传感器、一个 IMU 和一个英特尔Movidius Myriad 2 VPU。所有的 V‑SLAM 算法都直接在 VPU 上运行,能够实现非常低的延迟和非常高效的功耗。T265 经过广泛的性能测试和验证,在预期使用条件下,闭环偏移小于 1%。姿态动作与动作反射之间的延迟不到 6 毫秒。
SLAM(同步定位与建图)是一个计算问题,也是当下的热点技术问题。即设备如何构建或更新未知环境的地图,同时追踪自己在该环境中的位置?在 GPS 出现之前,水手们通过星星导航,利用它们的运动和位置来成功找到穿越海洋的路径。V‑SLAM 将摄像头与惯性测量单元 (IMU) 结合起来,以类似的方法导航,利用环境中的视觉特征,即使在未知空间,也可精确追踪其路径。
笔者使用该款深度摄像头,通过查阅其官方SDK,简单调用API接口,即可实现所需要的大部分功能。

图 :T265相机官方文档
例如,输出高精度3维姿位信息

图 :在软件中得到解算出的位姿信息
4.3图像识别技术
随着数字图像处理技术和人工智能的不断发展,图像识别技术无论在识别精度还是识别速度都有了长足的进步。与图像识别相关的视觉技术在无人机上也得到了越来越广泛的应用。
图像识别通常有轮廓识别、特征识别、色彩识别、物体识别等,其中轮廓识别是重中之重。
图像识别的基本流程为:信息获取图像采集->图像预处理得到特征数据->训练过程->识别。
传统目标检测系统采用deformable parts models (DPM)方法,通过滑动框方法提出目标区域,然后采用分类器来实现识别。近期的R-CNN类方法采用region proposal methods,首先生成潜在的bounding boxes,然后采用分类器识别这些bounding boxes区域。最后通过post-processing来去除重复bounding boxes来进行优化。这类方法流程复杂,存在速度慢和训练困难的问题。
YOLO为一种新的目标检测方法,该方法的特点是实现快速检测的同时还达到较高的准确率。作为一种基于单独神经网络模型的目标检测方法,具有特点可以高准确率快速检测,同时具有一定鲁棒性,可以适用于实时目标检测。
其作者将目标检测的流程统一为单个神经网络。该神经网络采用整个图像信息来预测目标的bounding boxes的同时识别目标的类别,实现端到端实时目标检测任务。

图 : yoloV5
笔者也简单的复现了yoloV5对图像的识别,

图 : 启动yoloV5
在安装好anaconda、PyTorch、CUDA等等的环境依赖后,笔者最终实现了对自己的识别(哈哈)。

图 :yoloV5物体识别效果
5.结语 致谢
至此,对于浅谈现代无人机技术就结束了,如果有描述不准确或者出现错误的地方,也恳请读者能细心指出。
由衷的感谢周围的老师、师兄们的支持,也感谢学校、学院能够给我提供一个这样的平台,使我的爱好、能力得到施展与发挥。
研究感喜欢的方向,做感兴趣的项目,或许工科男的快乐就这么简单。
希望所有人都能有明确的爱好与目标,并且能够让它们伴随一生,让它们不断为我们带来乐趣与幸福。
参考文献
[1]苏运德,叶正寅,许和勇.桨尖间隙和双桨间距对涵道螺旋桨气动性能的影响[J].航空动力学报,2014,29(06):1468-1475.DOI:10.13224/j.cnki.jasp.2014.06.029.
[2]刘伟,马彪,马利强,陈雪辉,俞传阳,黄磊,李昊.卡尔曼滤波融合遗传PID控制算法在提高播种精度中的应用[J].安徽农业大学学报,2021,48(04):674-679.DOI:10.13610/j.cnki.1672-352x.20210824.001.
[3]蔺晓俊,薛涛,孙习贞.基于视觉惯性里程计的室内自主飞行无人机系统设计[J].机械设计,2021,38(S2):99-103.DOI:10.13841/j.cnki.jxsj.2021.s2.020.
[4]沈洪梁. 单/多四旋翼无人机系统平台的设计及若干应用的研究[D].浙江大学,2016.
[5]Redmon J , Divvala S , Girshick R , et al. You Only Look Once: Unified, Real-Time Object Detection[J]. IEEE, 2016.
[6]知乎 YOLO:实时快速目标检测 :
https://zhuanlan.zhihu.com/p/25045711
[7]百度百科:
PID串级控制 :https://baike.baidu.com/item/PID%E4%B8%B2%E7%BA%A7%E6%8E%A7%E5%88%B6/21631977
自抗扰控制器 :
https://baike.baidu.com/item/%E8%87%AA%E6%8A%97%E6%89%B0%E6%8E%A7%E5%88%B6%E5%99%A8/7998798
MPU-6050 :
https://baike.baidu.com/item/MPU-6050
TOF :
https://baike.baidu.com/item/TOF/19952376#viewPageContent
MPC :
https://baike.baidu.com/item/MPC/3586091
惯性导航(inertial navigation):
https://baike.baidu.com/item/%E6%83%AF%E6%80%A7%E5%AF%BC%E8%88%AA/5951188
双目立体视觉(Binocular Stereo Vision):
https://baike.baidu.com/item/%E5%8F%8C%E7%9B%AE%E7%AB%8B%E4%BD%93%E8%A7%86%E8%A7%89
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)