深度视场角(Depth Field of View)
Realsense相机深度图的建立依赖双目立体成像原理,其有效视场是左、右成像器视场的重叠部分,如下图所示
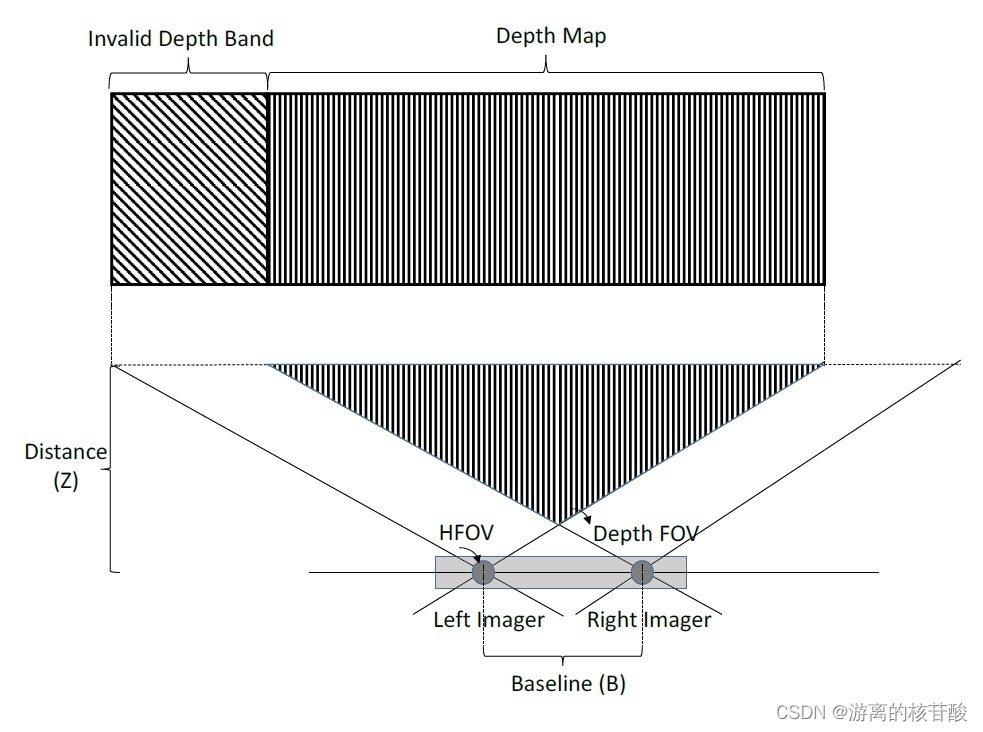
顺带一提,这张图不能用于计算双目相机深度成像模式下成像的最小距离,我之前就误解了。
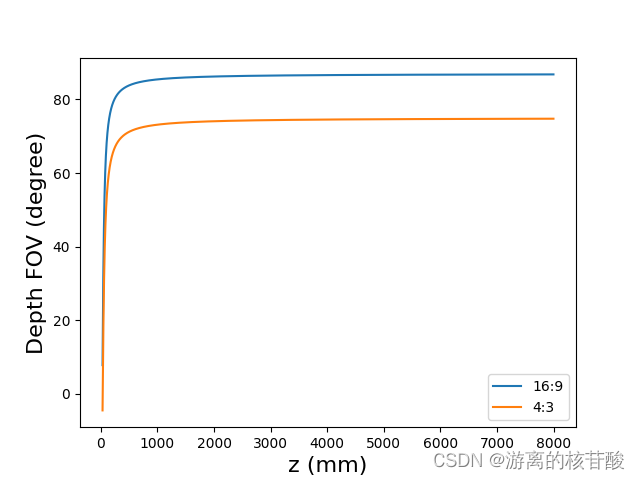
以下公式可计算任意距离(z)处的深度视场角

符号:
- Depth FOV:深度视场角
- HFOV:左成像器的水平视野范围
- B:基线,即左右成像器中心距
- Z:深度
针对D435i相机,各参数如下表
| Baseline | Depth FOV HD(16:9) | Depth FOV VGA (4:3) |
|---|
| 50mm | H:87 / V:58 / D:95 | H:75 / V:62 / D:89 |
注意:
H = Horizontal FOV, V = Vertical FOV, D = Diagonal FOV
因此,D435i相机的深度视场角范围如下图
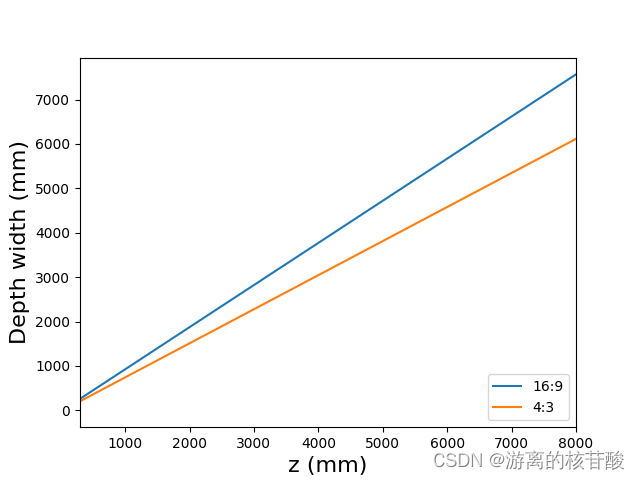
进一步地可以计算出水平方向有效视场宽度的一半
参考: https://zhuanlan.zhihu.com/p/158550848
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)