1、 马尔科夫
参考:https://zhuanlan.zhihu.com/p/489239366
2、协方差矩阵
1)对于一个样本集合S,如果每个样本是一个n维空间中的一个列向量,则使用协方差矩阵 描述样本之间的变化程度,协方差矩阵的定义式:随机变量x与y的协方差 记为:cov(x,y)

2)协方差
a.协方差矩阵能处理多维问题;
b.协方差矩阵是一个对称的矩阵,而且对角线是各个维度上的方差。
c.协方差矩阵计算的是不同维度之间的协方差,而不是不同样本之间的。
d.样本矩阵中若每行是一个样本,则每列为一个维度,所以计算协方差时要按列计算均值。
3)协方差几何意义
参考:https://zhuanlan.zhihu.com/p/37609917
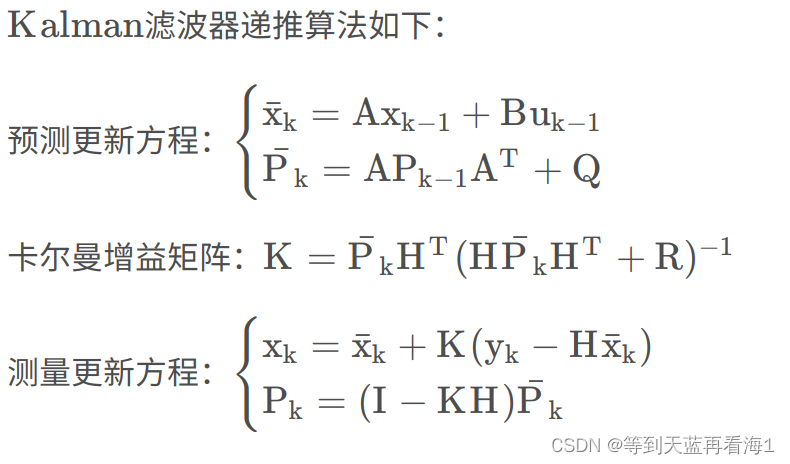
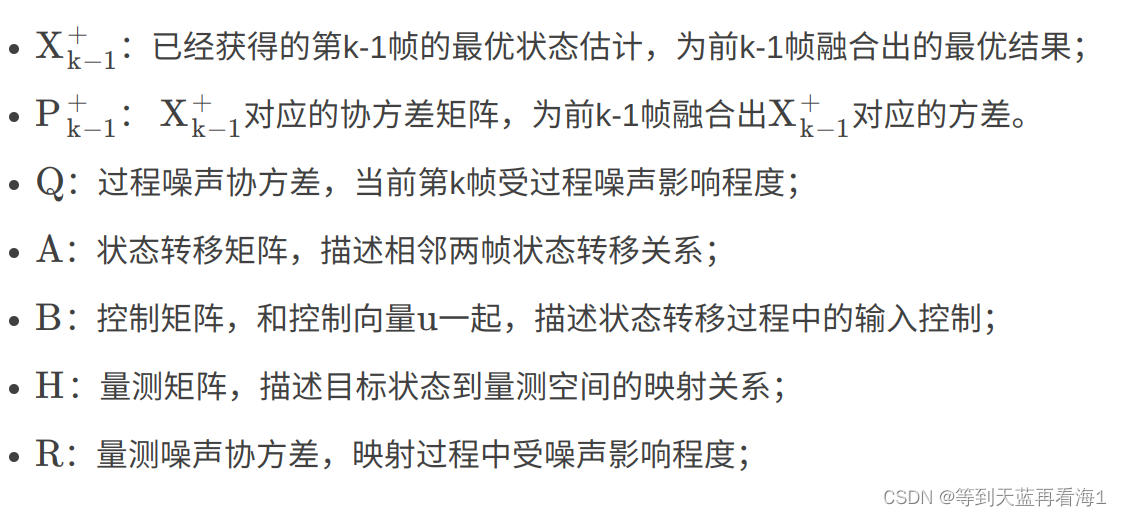
3 KF
参考:
https://blog.csdn.net/heyijia0327/article/details/17487467
https://blog.csdn.net/weixin_53187505/article/details/123562489
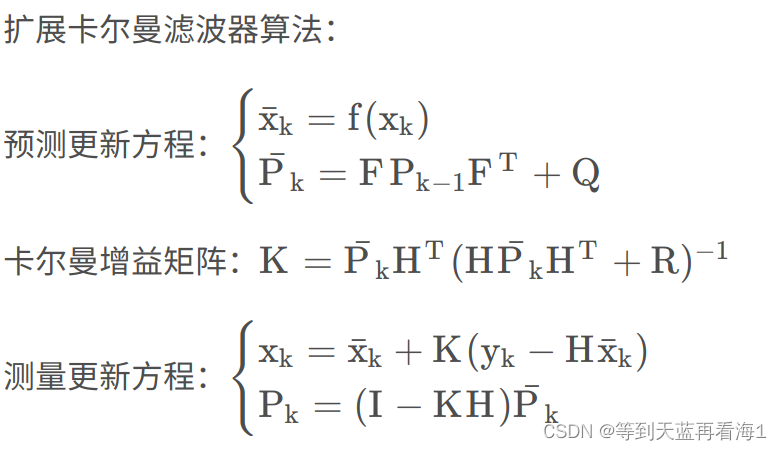
4 EKF:
1)雅克比矩阵
https://blog.csdn.net/su_fei_ma_su/article/details/125457422
2)将非线性环节线性化,对高阶项采用忽略或逼近措施:扩展卡尔曼滤波( EKF ) ,卡尔曼滤波的前提是它认为系统都是线性的,如果状态转移函数是线性的,那么在经历线性变换之后,分布保持其高斯特性;如果状态转移函数是非线性的,那么在经历线性变换之后,那么得到的状态分布可能不是高斯分布。因此,卡尔曼滤波算法可能会不收敛。在这种情况下,可以使用扩展卡尔曼滤波算法(EKF),它把非线性函数在当前估算状态的平均值附近进行线性化,每一个时间步执行线性化,然后将得到的雅克比矩阵用于预测和更新卡尔曼滤波算法。当系统是非线性,并且可以通过线性化很好的近似时,那么扩展卡尔曼滤波算法是状态估算的一个很好的选择。
简单的说,由于系统通常是非线性的,于是我用近似线性化的方法,对所求时刻的函数进行一阶泰勒展开得到一个近似的线性化方程,在此基础上运用卡尔曼滤波算法求解。
关于扩展卡尔曼滤波可以参考下面的几个链接:
https://zhuanlan.zhihu.com/p/67138271
https://www.cnblogs.com/alexgl2008/articles/12866501.html
https://www.jianshu.com/p/f0650a18430e
缺点:
1、由于复杂的导数,可能难以解析计算雅克比矩阵;
2、而以数值方式计算它们可能需要很高的计算成本;
3、扩展卡尔曼滤波算法不适用于具有不连续模型的系统,因为系统不可微分时雅克比矩阵不存在
4、高度非线性系统的线性化效果不好。
5 UKF
参考:https://blog.csdn.net/qq_37207042/article/details/104062778
6 KF、EKF、UKF对比
参考:https://blog.csdn.net/zhaoliang38/article/details/127509755

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)