本来在linux下实现目标识别不麻烦,麻烦的是当你只有一个深度摄像头且别的应用需要在ROS下执行并占用摄像头资源导致别的线程无法获得摄像头数据。
反观使用深度摄像头能干很多事情,测距,测速,坐标转换的工作
本实验所用平台:无gpu,cpu i7-10710U,realsense-d435i深度摄像头,ubuntu18.04,ROSmelodic
由于无gpu,计算的时候比较卡,有gpu肯定会好很多,至于测速,有基于相对距离计算的速率,和利用建立完坐标后计算的绝对速度矢量,显示的是相对的 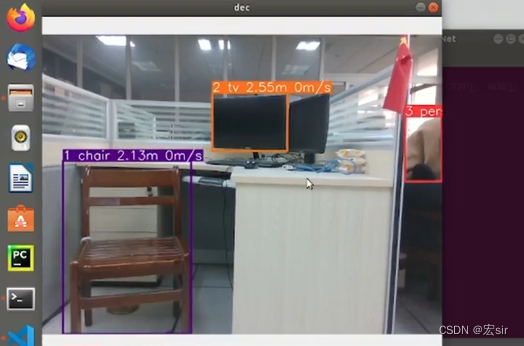
同一类别的物体会有自己独立的id方便建模
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)