目录
前言
1 二阶系统LESO观测器设计
2.基于LESO的滑模控制器设计
3. 仿真分析(普通高增益项)
3.1仿真模型
3.2仿真结果
3.3 总结
4. 仿真分析(优化后的高增益项)
4.1 优化高增益项
4.2仿真结果
4.2.1 高增益①仿真结果
4.2.2 高增益②仿真结果
4.3 总结
5 学习问题
前言
上两篇文章我们介绍了扰动观测器和高增益观测器,顾名思义,扰动观测器就是观测未知的扰动,使我们系统针对扰动时能够“对症下药”;高增益观测器就是一种状态观测器,由于实际中系统并非都是理想的可直接测量的,所以需要借助观测器得到状态变量。
VSC/SMC(八)——基于慢时变干扰观测器的滑模控制(含程序模型)_Mr. 邹的博客-CSDN博客_慢时变干扰观测器
VSC/SMC(七)——基于高增益观测器的滑模控制(白嫖程序模型)_Mr. 邹的博客-CSDN博客
本篇文章,继续介绍一种常见的扩张观测器,也就是我们文献中常看到的缩写:LESO,并且可以和控制器并行设计。
那为什么叫“扩张”?是因为它的结构上比系统多了状态变量。
好了我们开始介绍以及仿真分析吧。
1 二阶系统LESO观测器设计
先以一个简单的二阶系统为例进行设计,它的状态空间方程为如下标准形式:
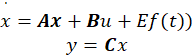
其中:

假设这个系统的状态变量是不可测的,为其设计如下的LESO:
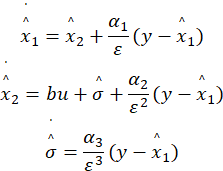
其中,ε > 0,且α1、α2、α3均为正实数,即满足如下多项式为Hurwitz多项式:

观测器的状态变量为:
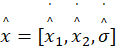
可以看到,比上述二阶系统的状态变量多了一个,实际上σ可以看成是对扰动f的一个观测/估计。
也有的文献直接将分式看成一个调节参数,如下:
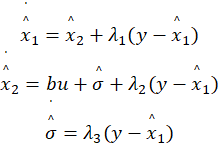
同理,λ1、λ2、λ3均为正实数。
还有的文献直接将误差变量进行观测,有兴趣的读者可以参考这篇:
《基于扩张观测器的非线性不确定系统输出跟踪---王新华》
对于稳定性分析,读者可以自行阅读文献,这里篇幅原因就不介绍了,谢谢理解!
2.基于LESO的滑模控制器设计
为了使x1能跟踪指令位置x1d,所以跟踪误差e = x1-x1d,并定义如下的线性滑模面:

其中,c > 0。
注:其实这个滑模面是“中间”滑模面,“中间”指的是观测器,所以后面证明稳定性还是要引入第一级滑模面。
这里我还是应用等效滑模的思想设计控制律:
①对滑模面求导,有:

②选取等速趋近律,并且联立滑模导函数,有:

③Lyapunov稳定性证明
略......
所以得到得控制律为:

为了减少抖阵,取ηsign(s) = ηs ,进而得到:
其中:

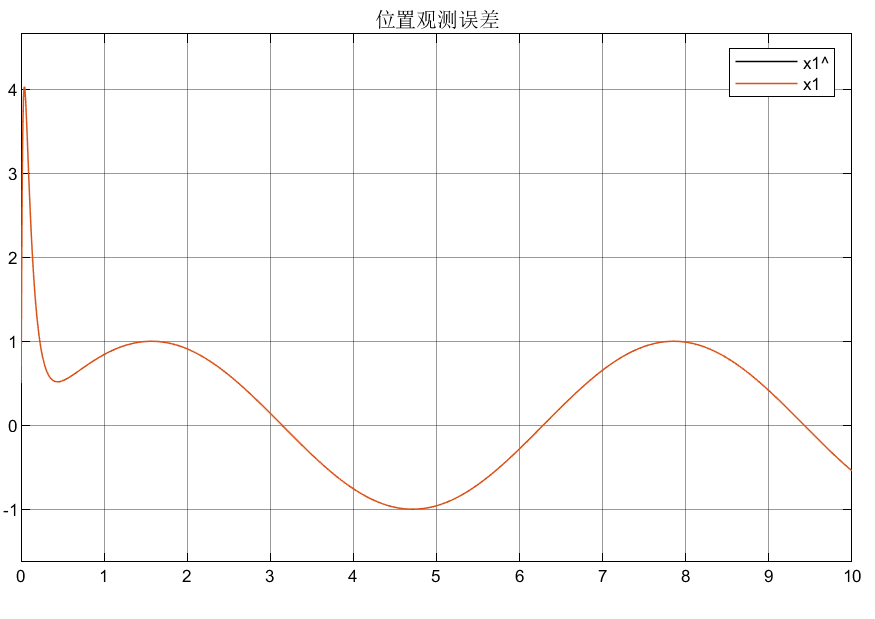
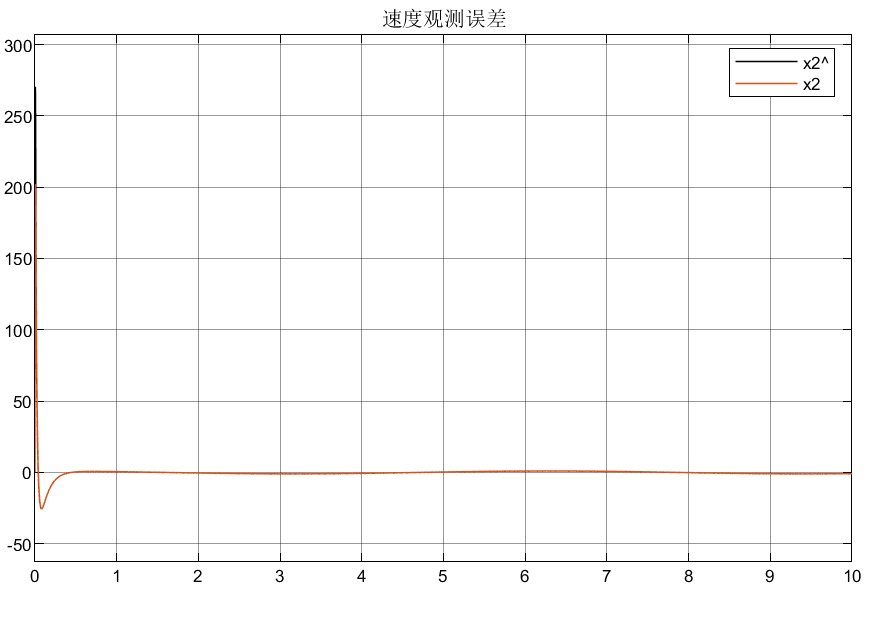
注:这里的误差是观测器与指令位置之间的误差,同理(x1^)'-(x1d)' = (e')^,即跟踪位置导数(速度)的观测误差。
3. 仿真分析(普通高增益项)
3.1仿真模型
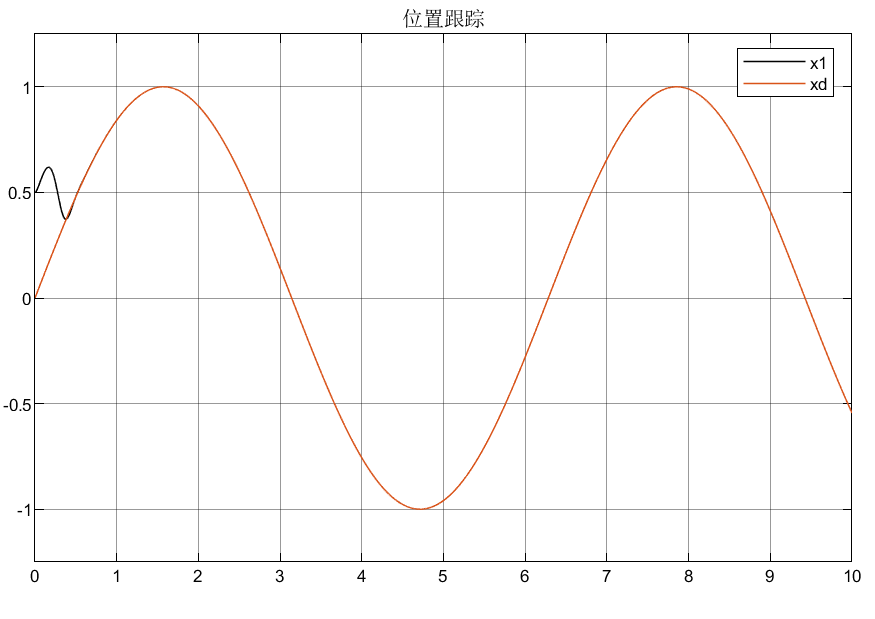
取上述系统b = 0.1,扰动d = 3*sin(t),指令位置xd = sin(t),并取初始状态为[0.5;0],建立的simulink模型如下:

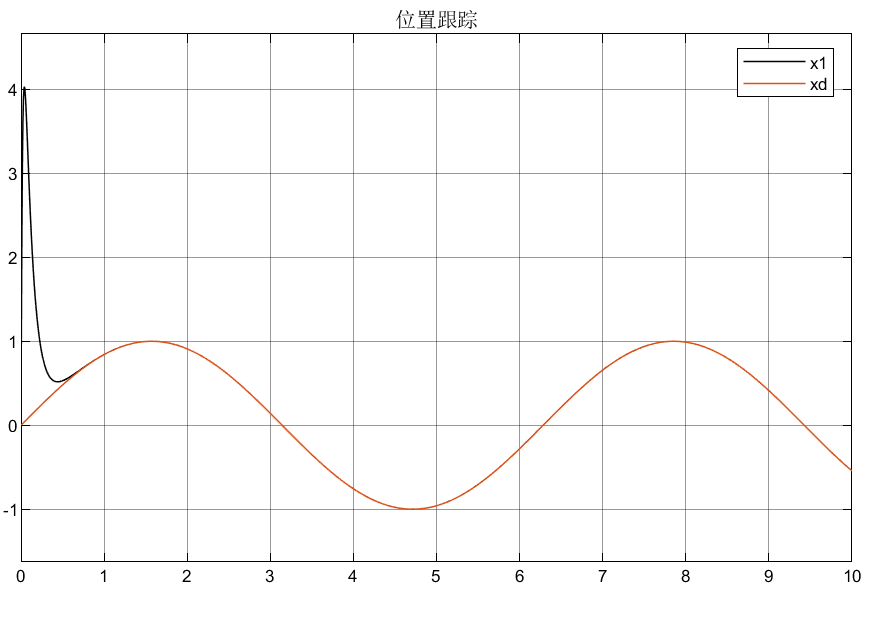
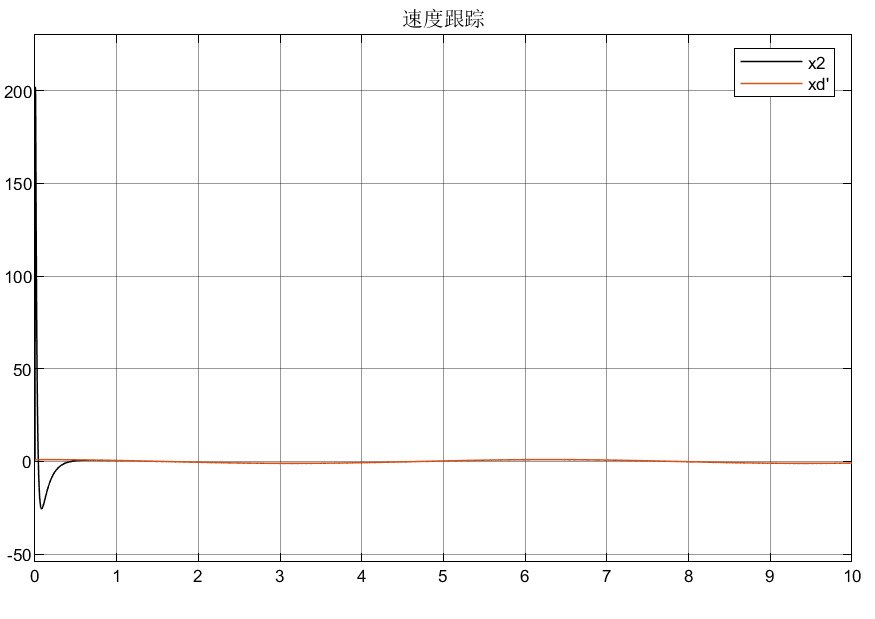
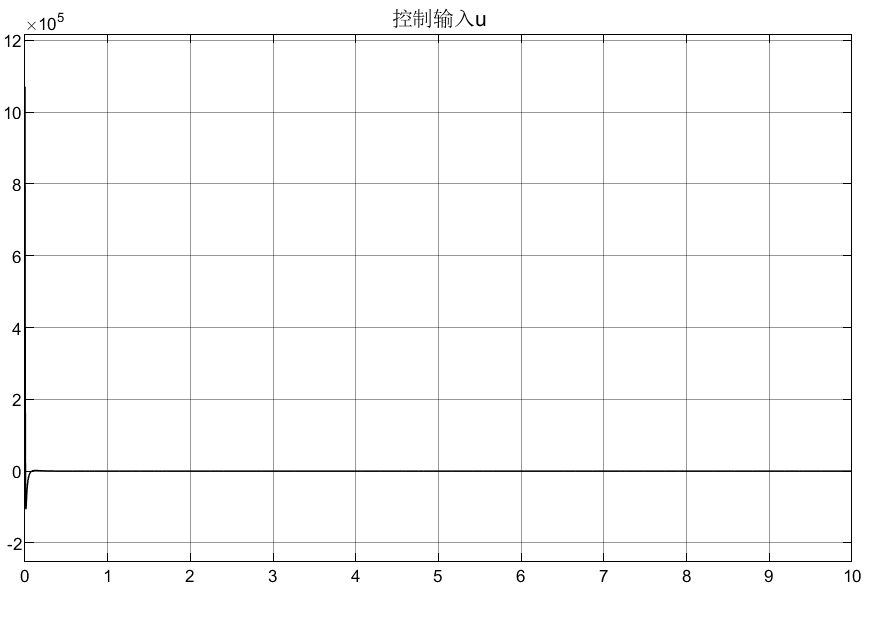
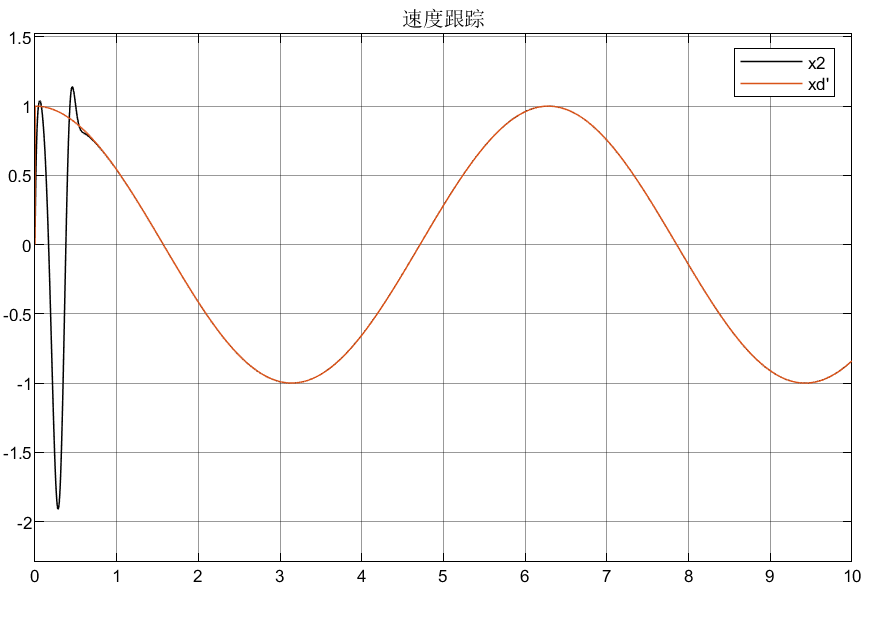
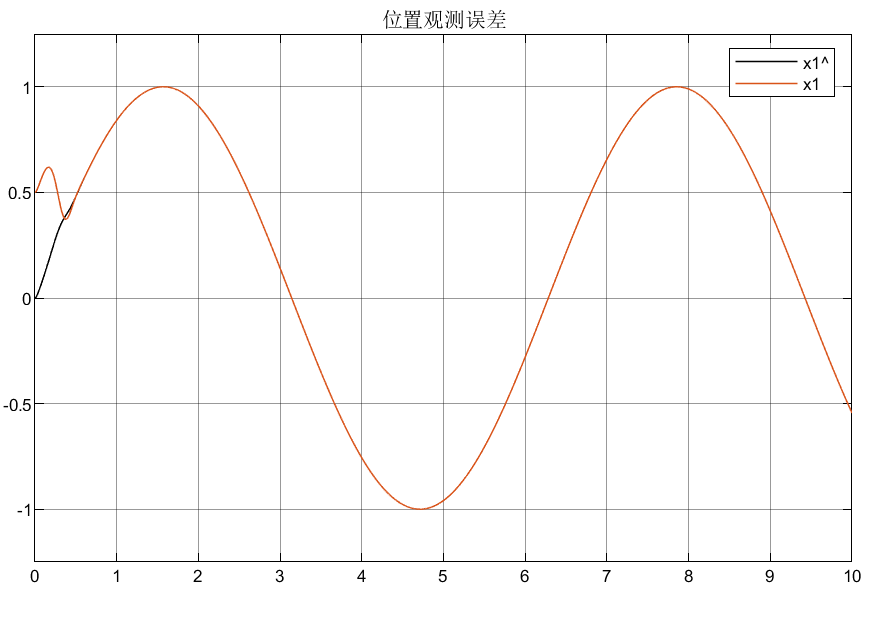
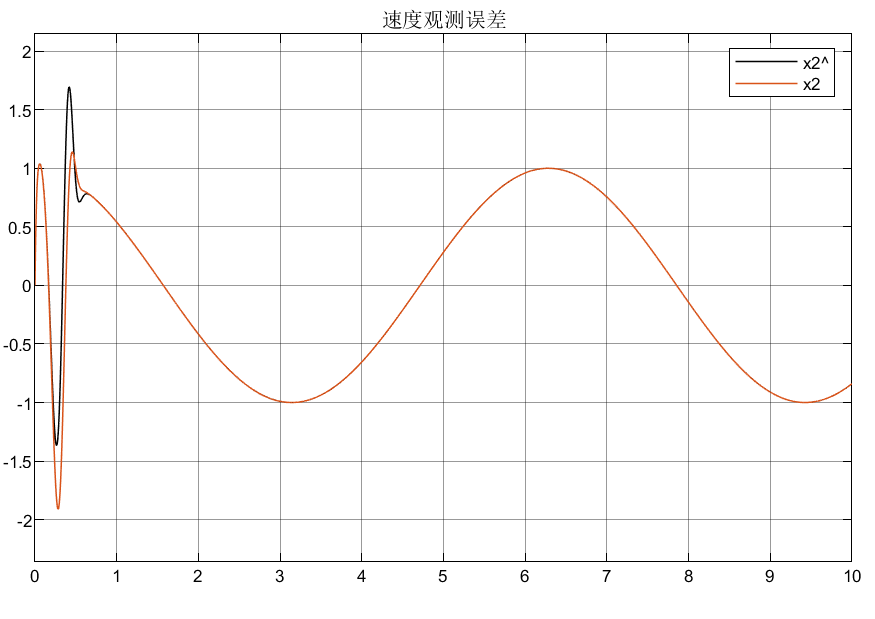
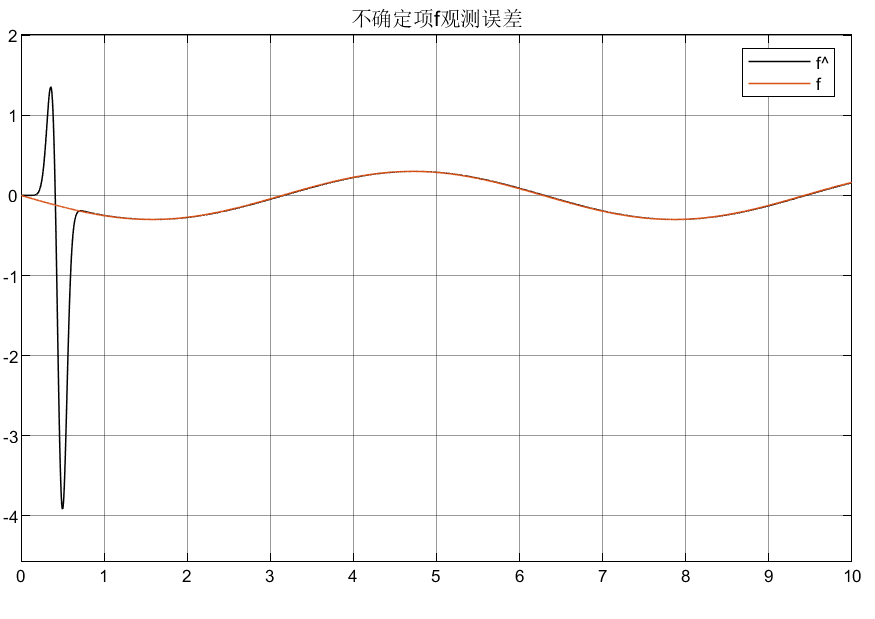
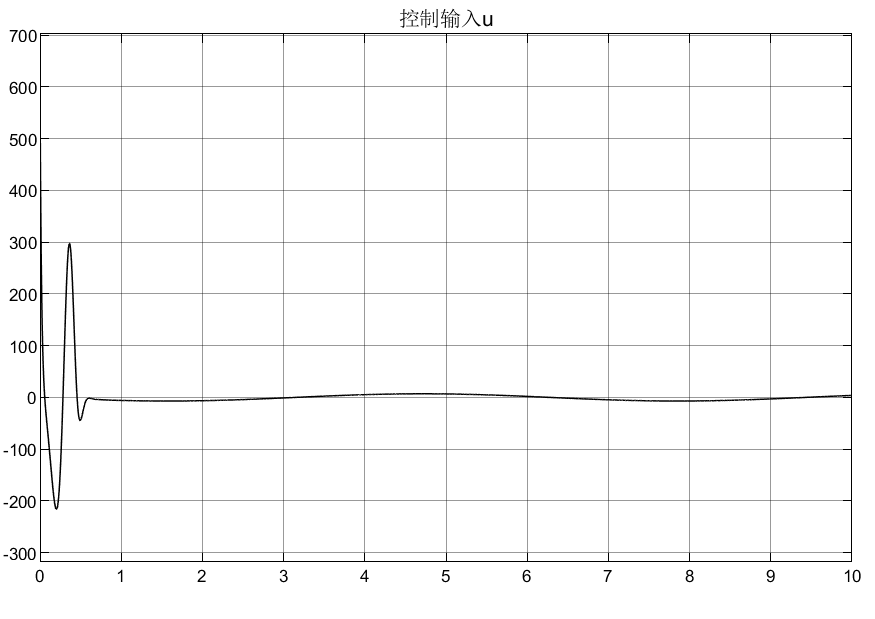
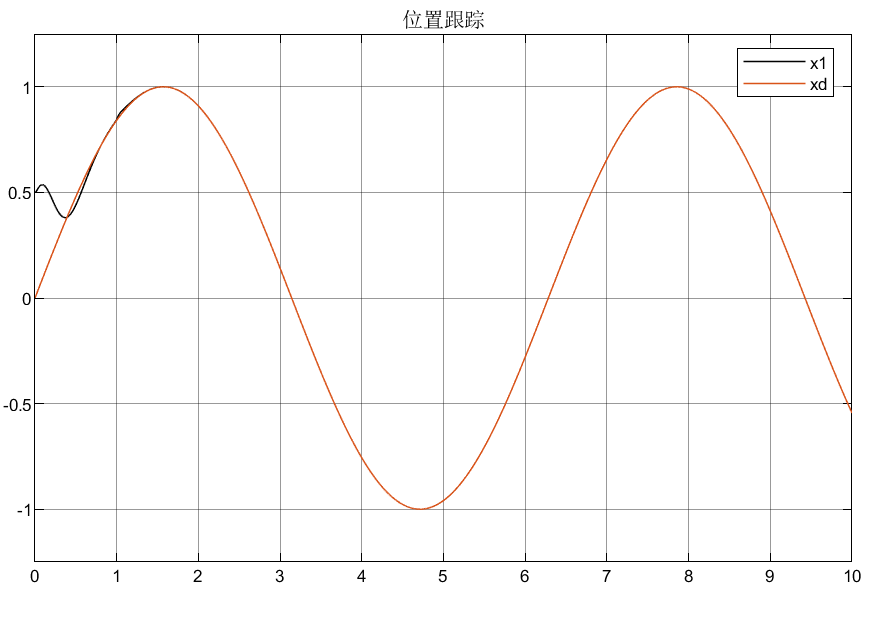
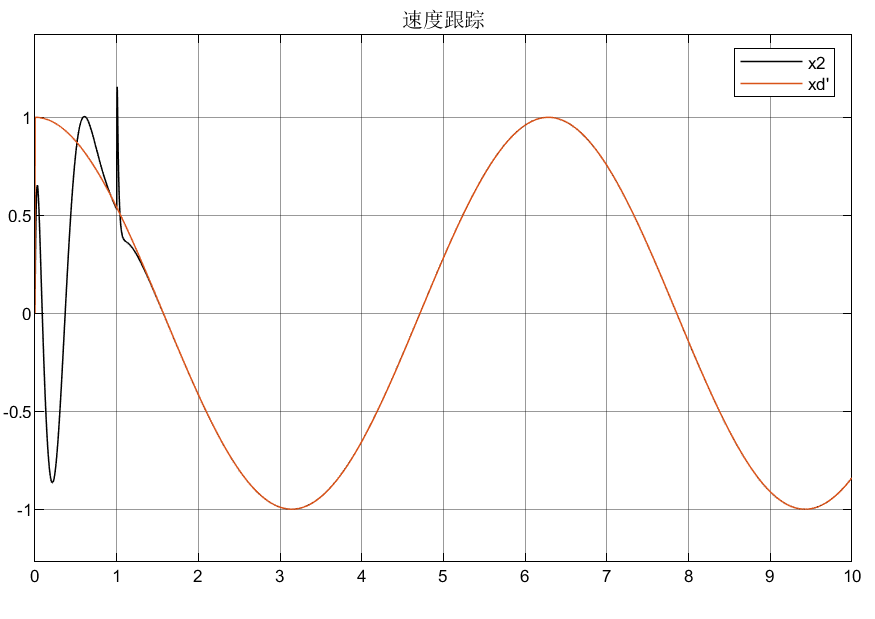
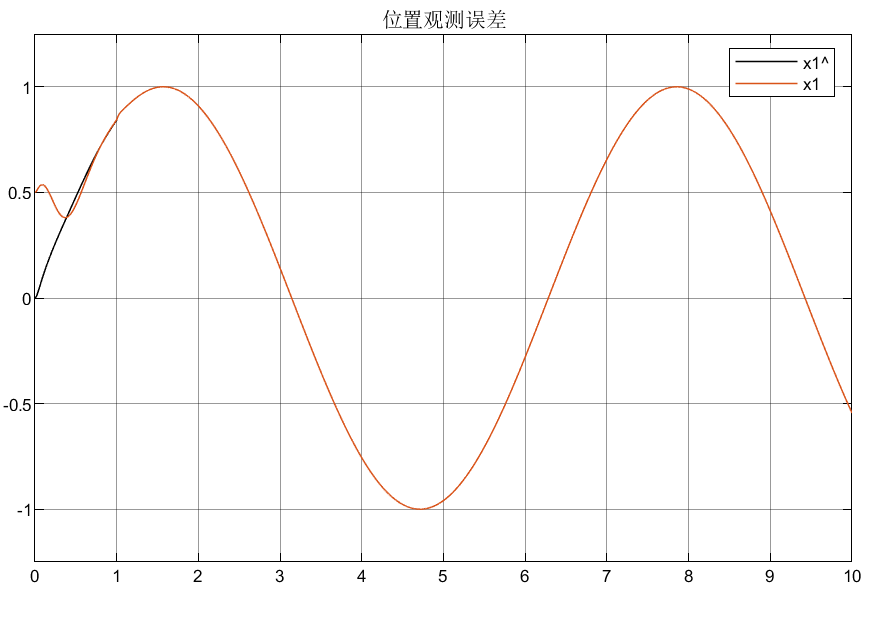
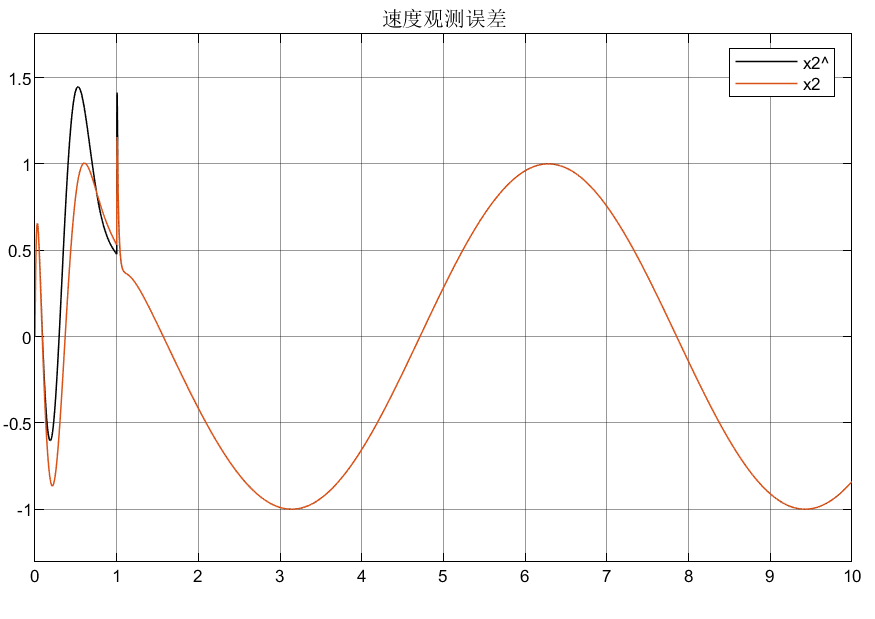
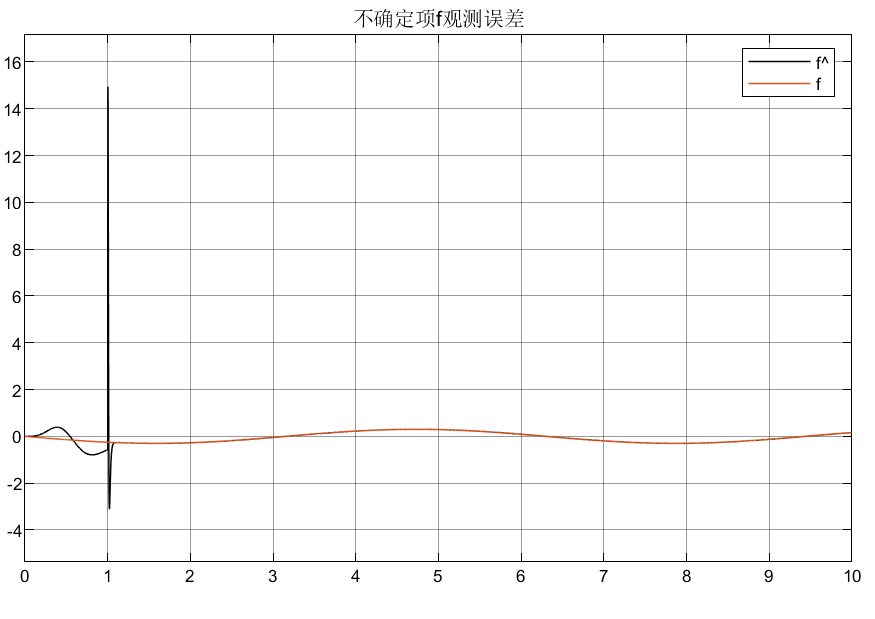
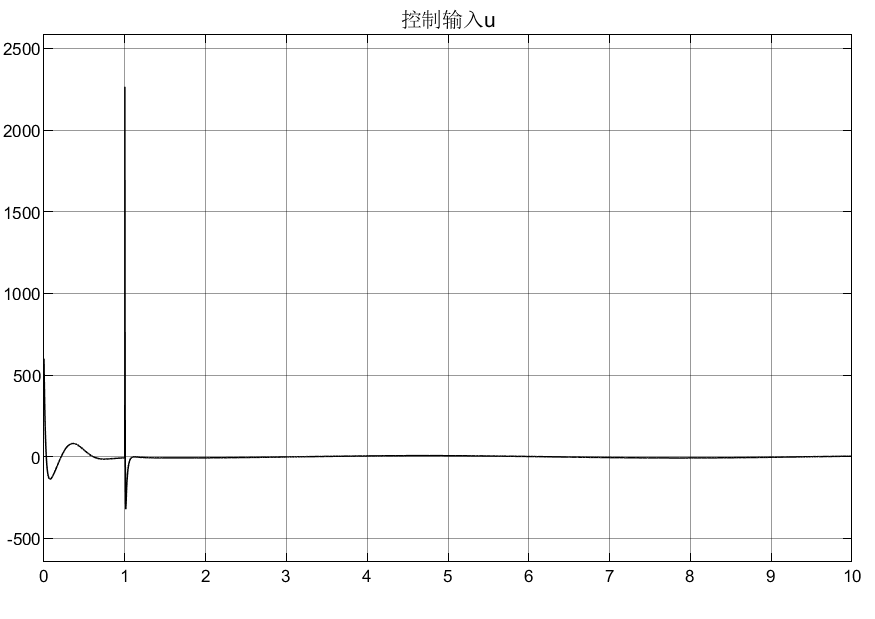
3.2仿真结果

3.3 总结
优点:可以看到,这样的状态观测器因为有高增益的存在,所以能使跟踪误差迅速趋于0,即跟踪效果和反应速度很快;
缺点:但是导致了一个问题,由于高增益项的存在使得初始峰值很大,这样导致初始的误差很大,而且对控制器的伤害也很大,所以需要优化设计高增益项。
4. 仿真分析(优化后的高增益项)
4.1 优化高增益项
由于扩张观测器本质上也是一种高增益观测器,从上述的仿真结果我们可以看到虽然最终效果不错,但是如果扩张观测器的初始值与被控对象的初值不同,便会导致峰值现象,现在设计如下的两种高增益:
①

②
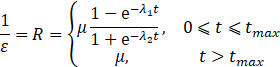
其中,u > 0,λ1 > 0,λ2 > 0。
4.2仿真结果
4.2.1 高增益①仿真结果
4.2.2 高增益②仿真结果
4.3 总结
可以看到相比较普通增益,优化后的自适应增益对初始状态的峰值明显较小,说明了所设计优化增益的合理性。
5 学习问题
①对于Simulink Scope模块的多次使用会导致运算时间长,可以选择使用To Workspace模块将数据输出到工作区间后,使用命令画图。
②所谓的“扩张”指的是扩张了对不确定性项f的估计,把f当成状态变量,所以整体的观测器比被控对象多了一个状态变量f^。
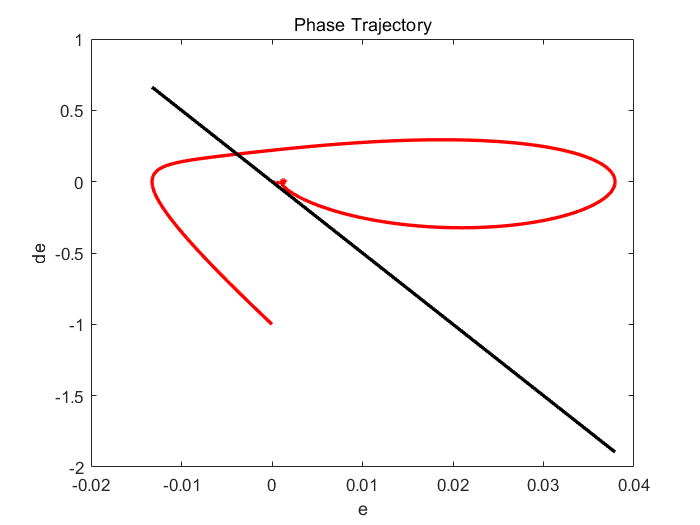
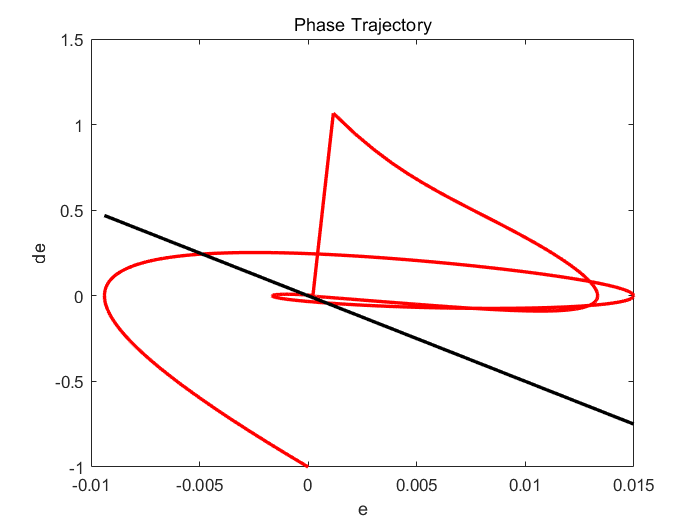
③从相轨迹看稳态误差感觉有些奇怪。
如果有帮助,麻烦帮忙点个赞是我最大的分享动力,非常感谢!
注:仅为便利自己学习,错误在所难免,如有侵权,请联系删除,有兴趣的学者可以参考学习交流,谢谢!
参考资料:
《Nonlinear Control》
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)