Python
Java
PHP
IOS
Android
Nodejs
JavaScript
Html5
Windows
Ubuntu
Linux
自动控制原理(1)-典型环节的传递函数
2023-05-16
构成线性定常控制系统的七个环节:
比例环节
,
微分环节
,
一阶微分环节
,
二阶微分环节
,
积分环节
,
惯性环节
,
振荡环节
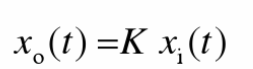
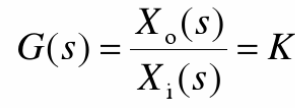
1.比例环节
K为
比例系数
比例环节又称
无惯性环节
或
放大环节
比例环节
既无零点,又无极点
性质:
比例环节输出与输入成正比,不失真也不滞后
实例:
理想的杠杆、放大器、测速发电机、电位器等
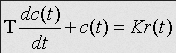
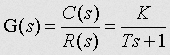
2.惯性环节
T为
时间常数
K为
放大系数
(比例系数)
惯性环节
无零点
性质:
当系统输入时单位阶跃信号时系统输出按单调指数规律上升
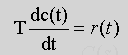
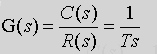
3.积分环节
T为积分
时间常数
积分环节
无零点
当输入是
单位阶跃信号
时,
积分环节的输出以固定斜率
1 T \frac{1}{T}
T
1
单调上升
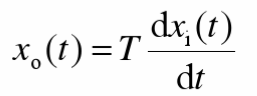
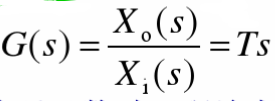
4.微分环节
微分环节的
输出与输入的一阶导数成正比,因此微分环节能预示输入信号的变化趋势,常用来改善控制系统的动态性能
5.振荡环节
ωn
为
无阻尼自然振荡频率
ζ
为
阻尼比
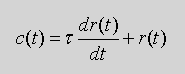
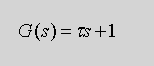
6.一阶微分环节
τ \tau
τ
为
时间常数
比例微分环节可以
抑制震荡,提高控制系统的稳定性,改善系统的动态性能
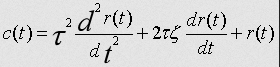
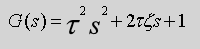
7.二阶微分环节
τ \tau
τ
为
时间常数
ζ为
阻尼比
二阶微分环节
没有极点,有2个零点
实际中也
不存在
真正的二阶微分环节
本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)
自动控制原理(1)-典型环节的传递函数 的相关文章
为什么要架设移动基站
RTK基站 RTK 基站是植保无人机系统实现精准作业的基石和保障 xff0c 植保无人机或手持测绘器实时接收 RTK 基站广播的差分数据 xff0c 实时纠正 GNSS xff08 全球卫星导航系统 xff09 的导航误差 xff0c 从而
RTK和PPK技术科普
参考链接2 xff1a https blog csdn net hailiannanhai article details 78494366 RTK技术 RTK xff08 Real time kinematic xff0c 实时动态 xf
cas-overlay-template 搭建单点登录服务端
1 先下载overlay template的源码 git clone https github com apereo cas overlay template git 切换到5 3的分支 2 编译的坑 需要下载cas server weba
Docker容器中时间设置
项目中使用SpringBoot框架 xff0c docker部署 xff1b 默认容器使用UTC时间 xff0c 跟本地时间相差8个小时 xff0c 在查看日志的时候时间偏差很不爽 xff0c 于是参考了网上资料之后做了一些修改 xff0c
认识蜂鸣器和声音奥秘
1 编程知识点 xff08 循环逻辑 变量 xff09 2 模块知识点 xff08 蜂鸣器模块 xff09 3 科学知识点 xff08 声音的奥秘 xff09 环境 xff1a 网络及手机 电脑 准备 xff1a 小龟小车主控板 第一节 x
mini2440 触摸屏调试程序记录
今天看了一下s3c2440的touch screen control借口 xff0c 完成了裸机程序的调试 xff0c 把代码记录如下 其他的代码和前面做的实验基本一样 xff0c 只是在ad中断里面添加了对于触摸屏的处理 xff0c 初始
【控制理论】用ADRC控制倒立摆
【控制理论】状态观测器解析
背景 有些状态量并不能由传感器直接观测出来 xff0c 那么可以通过控制量和输出量把状态量观测出来 全状态观测器 对于一个系统 x 61 A x 43
【控制理论】线性二次型最优控制解析
https blog csdn net heyijia0327 article details 39270597 这篇文章把线性二次型的最优控制问题讲的很透彻了 xff01 有几个问题在这里提一下 xff1a 1 如何确定Q矩阵 R矩阵 x
Ubuntu系统中添加中文字体和修改默认中文字体
在Ubuntu系统中 中文字体默认是繁体的 而且比较难看 xff0c 但是Ubuntu系统的英文字体却很好看 xff0c 就想只修改中文字体 xff0c 保留默认的英文字体 首先检查是否安装了中文字体 xff0c 在终端上输入下面指令查看已
window7 触屏操作相关
一 体系概述 1 Windows Touch Input 和 Gestures消息 Windows Touch消息特性 通过在执行期间的监听和解释来使能 下面的示例展示了Windows7 上消息是怎么从硬件产生并发给应用程序的 在最左边的那
【控制理论】滑模控制最强解析
更新 xff0c 在知乎创建了一个专栏 xff0c 主要包括一些控制理论和机器人控制方面的知识 https zhuanlan zhihu com p 78549442 滑模控制是一种相当简单而且控制性能优越的控制方法 xff0c 但是绝大多
【stm32】 OS 支持特性之 PendSV 异常和 SVC异常
1 SVC和PENDSV 基本概念 SVC xff08 系统服务调用 xff0c 亦简称系统调用 xff09 和 PendSV xff08 可悬起系统调用 xff09 xff0c 它们多用于在操作系统之上的软件开发中 SVC 用于产生系统函
数据结构视频教程-绝对是史上最全的,共30个!!
史上最全的数据结构视频教程打包下载地址 本文出自出自我是码农 xff0c 转载请注明出处 xff0c 谢谢 xff01 以下数据结构视频教程是我多年收集的 xff0c 因为在百度网盘上分享整个教程很快就会被delete xff0c 所以我只
数据结构视频教程哪个好
来源 xff1a 我是码农 xff0c 转载请保留出处和链接 xff01 本文链接 xff1a http www 54manong com id 61 1207 目前 xff0c 具我粗略不完全统计 xff0c 网络上流传的数据结构视频教程
X11相关(一)
在盒子上折腾qtmediahub的时候 xff0c uxlaunch怎么都无法正常启动 xff0c 查了一下x11的log xff0c 发现错误如下 xff1a XSERVTransSocketUNIXCreateListener Sock
java获取首字母字符串首字母
import net sourceforge pinyin4j PinyinHelper import java util regex Pattern String hostName 61 34 集团 2012 版知识库管理系统 34 St
嵌入式到底该怎么学
想学习单片机的同学可以关注 私信我或者在评论区回复我要入门 很多人都不知道嵌入式怎么学 xff0c 这一期我就简单说一下我的理解 嵌入式这个概念太广了 xff0c 可能很多人认为嵌入式就是嵌入式Linux 但是其实并不仅仅只有Linux x
嵌入式有哪些发展方向?
想学习单片机的同学可以关注 私信我或者在评论区回复我要入门 最近几年经过移动互联网 物联网的高速发展 xff0c 嵌入式技术在我们生活中随处可见 xff0c 在通讯 网络 工控 医疗 电子等领域发挥着越来越重要的角色 xff1b 随着对嵌入
公式截取神器:将文献中的公式快速粘贴进word:
一共需要两个软件 mathpix snipping tool 负责对公式截屏 然后自动转化为LaTex公式语法 AxMath 负责将LaTex语法转化为word里可显示的公式 作用与MathType一样 但个人感觉这个软件更好用 而且还是国
随机推荐
ubuntu安装HDF5 1.10.4 以及对应的python hdf5包
1 安装HDF5 1 10以及对应的python hdf5的包 xff08 HDF5 1 10 4安装具体可参考其他博客 xff09 2 使用命令行环境变量安装对应的python hdf5包 xff0c HDF5 DIR 61 usr lo
Redis相关知识点整理
文章目录 前言一 Redis基本数据类型StringHashListSetSort Set xff08 zset xff09 二 键值 xff08 key xff09 的常用操作三 Redis持久化方式3 1 持久化方式之RDB3 2 持久
html5基础入门知识(干货)
一 什么是html 用来描述网页的语言 超文本标记语言 不是编程 xff0c 而是一种标记语言 使用标记标签来描述网页等等 我们只需记住html就是用标记标签来描述网页 xff0c xff08 网页是前端哦 xff0c 平时你们听过的c c
Matlab使用过程中内存不足问题的总结
做图像处理的 xff0c 对matlab这工具软件一定不会陌生 xff0c 他的高集成度为图像处理提供了很大的方便 xff0c 但我们在使用时难免会出现内存不足的问题 xff0c 2 3G的内存还不够处理一次简单图像 xff0c 这确实很恐
VIO系统介绍
VIO xff08 visual inertial odometry xff09 即视觉惯性里程计 xff0c 有时也叫视觉惯性系统 xff08 VINS xff0c visual inertial system xff09 xff0c 是
VINS-MONO概述
VINS Mono是HKUST的Shen Shaojie团队开源的一套Visual Inertial融合定位算法 xff0c https github com HKUST Aerial Robotics VINS Mono xff0c 是用
主流VIO框架分析及VINS部分解析
本文为搜集的资料整理 xff1a C0包含位姿和运动信息 xff1b 对于T0来说 xff0c 不仅受rv10 rv11的视觉影响 xff0c 也受rb01的IMU的影响 上述方式繁琐 xff0c 故引入因子图 xff0c 便于思路梳理和理
evo评测VINS-MONO---TUM数据集
为了想测试室外场景下VINS MONO定位情况 xff0c 室外环境的KITTY数据集因无时间戳 xff0c EVO测评较困难 故选择TUM数据集 xff0c outdoors1 8 户外 xff1a 在校园内的室外场景拍摄 xff0c 但
ROS编译错误:Could not find a package configuration file provided by “XXX“
解决 xff1a 系统提示缺少什么包 xff0c 就安装什么包即可 xff1a sudo apt get install ros noetic xff0c 依据自己的系统和出错提示更改相关内容 示例 xff1a 1 xff09 CMake
ZED2运行VINS-MONO初试
上篇博客 xff0c 已经完成ZED2的标定 xff0c 获取相关标定参数 xff0c 将在此基础上进行VINS的相关修改 xff0c 实现使用ZED2运行VINS MONO 一 VINS MONO环境搭建 因为系统环境从ubuntu18
ZED2双目相机运行VINS-FUSION初试
基于ZED2运行VINS MONO的经验 xff0c 在运行VINS FUSION前有几点tips想跟大家分享 xff0c 应该能在运行的过程中避免一些踩坑吧 TIPs 1 xff09 关于zed2标定 开始使用Kalibr进行相机单目 双
VINS Fusion GPS融合部分
概述 VINS Fusion在VINS Mono的基础上 xff0c 添加了GPS等可以获取全局观测信息的传感器 xff0c 使得VINS可以利用全局信息消除累计误差 xff0c 进而减小闭环依赖 局部传感器 如相机 xff0c IMU x
STM32烧录一次后无法再次烧录
STM32烧录一次后无法再次烧录 本人是使用cubemx配置stm32 xff0c 在配置sys时没有配置Debug xff0c 所以会导致程序只可以烧录一次的情况 xff0c 再次烧录会发生无法找到芯片的情况 解决方法是将单片机reset
Vins-fusion gps融合 KITTY数据集测试
下载kitti数据集 下载kitti数据集和真值poses的00 txt以及sequences文件00序列的times txt xff0c xff08 全网找了好久 xff0c 最后不得已翻墙从官网down下来的 xff09 代码修改 xf
Vins-fusion GPS融合部分测试(自己的数据ZED+RTK)
经过前一段时间的积累 xff0c 目前暂时成功实现了用自己的数据测试实现Vins fusion 43 GPS融合 xff0c 其实放在数据采集处理上的时间比较多 xff0c 踩了很多坑 xff0c 效果在一些部分还不是很好 xff0c 后期
Ceres Solver实例分析
ceres简介 Ceres solver 是谷歌开发的一款用于非线性优化的库 xff0c 在谷歌的开源激光雷达slam项目cartographer中被大量使用 本篇博客结合相关实例介绍一下 Ceres库 的基本使用方法 xff1a 使用Ce
MSCKF算法简介
感谢 xff1a 紫薯萝卜 https zhuanlan zhihu com p 76341809 论文 xff1a https arxiv org abs 1712 00036 代码 xff1a https github com Kuma
API函数详解:CreateSemaphore函数
Windows API函数 Visual Basic 语法格式声明Declare Function CreateSemaphore Lib 34 kernel32 34 Alias 34 CreateSemaphoreA 34 lpSema
java 专业英语词汇
abstract 关键字 抽象 39 bstr kt access vt 访问 存取 39 kses n 入口 使用权 algorithm n 算法 39 lg riem annotation java 代码注释 n u 39 tei n
自动控制原理(1)-典型环节的传递函数
构成线性定常控制系统的七个环节 xff1a 比例环节 xff0c 微分环节 xff0c 一阶微分环节 xff0c 二阶微分环节 xff0c 积分环节 xff0c 惯性环节 xff0c 振荡环节 1 比例环节 K为比例系数比例环节又称无惯性环
热门标签
建筑设计
建筑行业
Linux常见命令
电商API知识分享
虚拟展厅
大气污染扩散
Calpuff模型
路亚
知识点总结汇总
特殊BUG
搜索帮助
Sqlmap常用手册
盗梦空间
缓冲区攻击
网络安全技术理论讲解
企业电子招投标系统
纪念日
思考与反思
业务所需
语音技术
EMC测试
Net Core
 T为时间常数
T为时间常数