载安装包和破解文件
链接: https://pan.baidu.com/s/1X09GAchToEqyMRol3msGAA 密码: wak6
下载完成后解压
右击.iso镜像文件,选择使用其他程序打开

选择磁盘映像挂载器

打开后会在桌面上看到对应的磁盘,双击打开

会进入下图的目录,在该目录右键在终端打开

然后在终端输入pwd得到当前路径

然后新开一个终端,输入sudo /media/xj/MATHWORKS_R2019A/install
不同的电脑sudo后面的路径可能不一样
就是在上一步pwd的路径后面加一个install
然后回车执行,会出现下图的安装界面,按图中的选择进行下一步
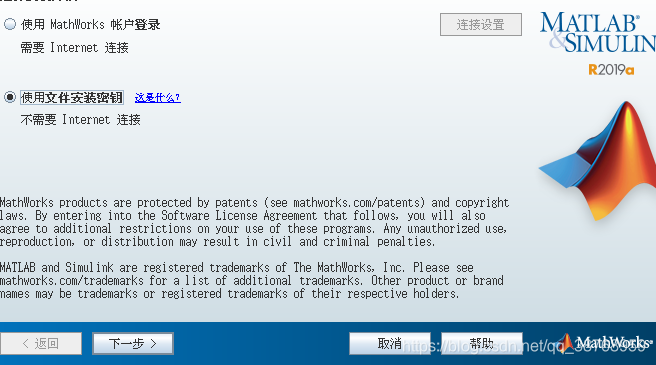
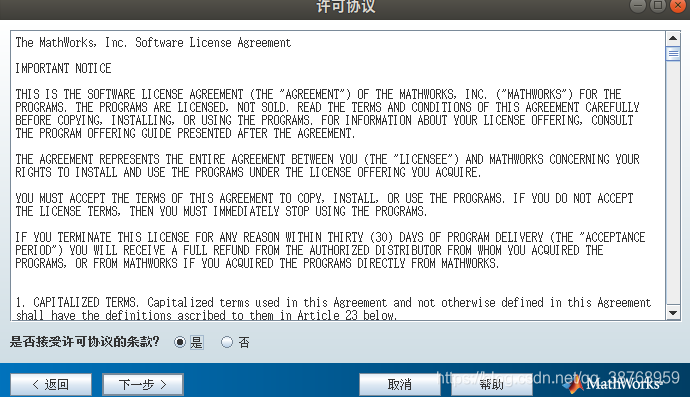
选是继续下一步
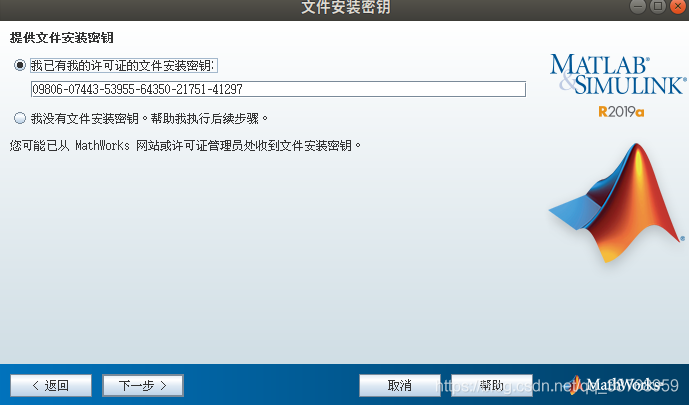
输入Readme.txt的序列号,比如09806-07443-53955-64350-21751-41297

选择安装路径,然后下一步

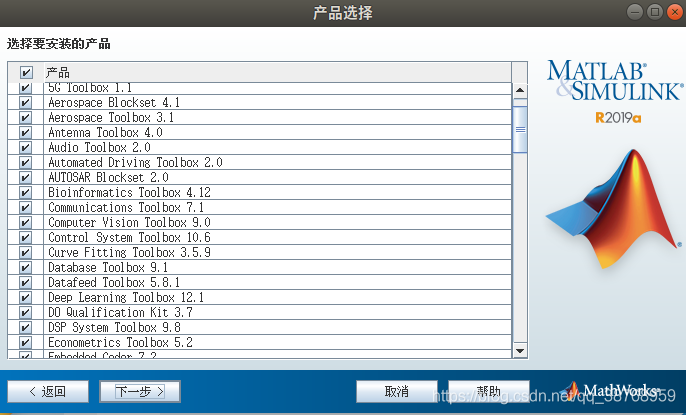
选择安装的工具,继续下一步
下一步安装

安装完成后如图

安装完成打开安装目录

右键在终端打开
执行
sudo chmod 777 R2019a

将下面的两个文件复制替换到matlab安装目录
先找到安装目录下的这个文件

右键在终端打开
执行sudo rm libmwlmgrimpl.so删除
然后将这个文件替换进去
cp libmwlmgrimpl.so /usr/local/Polyspace/R2019a/bin/glnxa64/matlab_startup_plugins/lmgrimpl

同理,创建licenses文件夹,文件夹里只将license.lic添加进去
最后在下图的安装目录下执行./matlab,正常的话matlab软件会打开,可以正常使用

本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系:hwhale#tublm.com(使用前将#替换为@)